pytorch常用normalization函数
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了pytorch常用normalization函数相关的知识,希望对你有一定的参考价值。
参考技术A 将输入的图像shape记为[N, C, H, W],这几个方法主要的区别就是在,batchNorm是在batch上,对NHW做归一化,对小batchsize效果不好;
layerNorm在通道方向上,对CHW归一化,主要对RNN作用明显;
instanceNorm在图像像素上,对HW做归一化,用在风格化迁移;
GroupNorm将channel分组,然后再做归一化;
SwitchableNorm是将BN、LN、IN结合,赋予权重,让网络自己去学习归一化层应该使用什么方法。
归一化与反归一化
https://blog.csdn.net/rehe_nofish/article/details/111413690
pytorch优雅的反归一化
https://blog.csdn.net/square_zou/article/details/99314197?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.control&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.control
重点关注
图片保存:torchvision.utils.save_image(img, imgPath)
https://blog.csdn.net/weixin_43723625/article/details/108159190
PyTorch学习(十四)Batch_Normalization(批标准化)
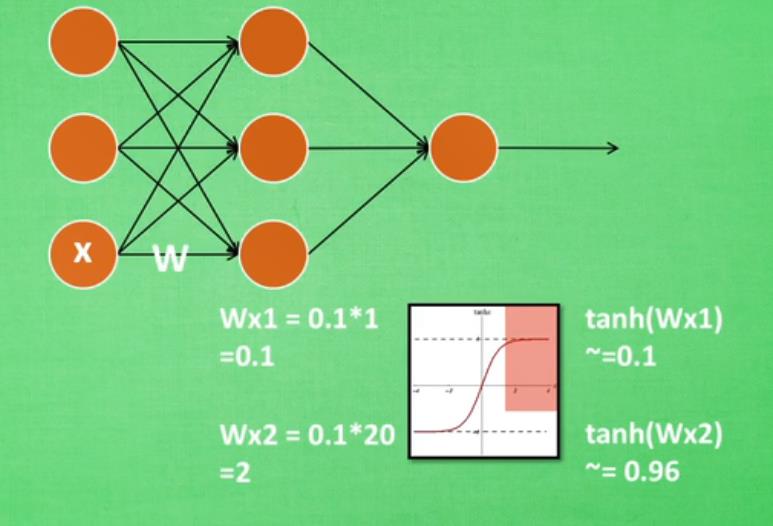
神经网络太深的话,传到后面,受到激励函数饱和区间、失效期间的影响,最后导致神经网络学不到了。
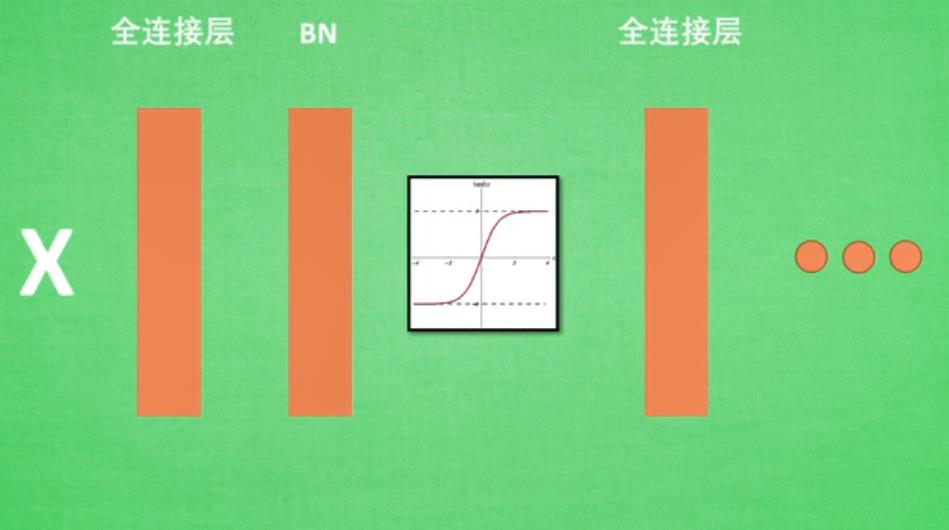
批标准化:将分散数据统一的一种方法,优化神经网络。处理方式大概为下图:
代码如下:
import torch
from torch import nn
from torch.nn import init
import torch.utils.data as Data
import matplotlib.pyplot as plt
import numpy as np
# torch.manual_seed(1) # reproducible
# np.random.seed(1)
#
N_SAMPLES = 2000
BATCH_SIZE = 64
EPOCH = 12
LR = 0.03
N_HIDDEN = 8 #8层
ACTIVATION = torch.tanh#采用的激活函数
B_INIT = -0.2 #
# 训练数据
x = np.linspace(-7, 10, N_SAMPLES)[:, np.newaxis]
noise = np.random.normal(0, 2, x.shape)
y = np.square(x) - 5 + noise
# 测试数据
test_x = np.linspace(-7, 10, 200)[:, np.newaxis]
noise = np.random.normal(0, 2, test_x.shape)
test_y = np.square(test_x) - 5 + noise
train_x, train_y = torch.from_numpy(x).float(), torch.from_numpy(y).float()
test_x = torch.from_numpy(test_x).float()
test_y = torch.from_numpy(test_y).float()
train_dataset = Data.TensorDataset(train_x, train_y)
train_loader = Data.DataLoader(dataset=train_dataset, batch_size=BATCH_SIZE, shuffle=True, num_workers=2,)
# 看一下数据
plt.scatter(train_x.numpy(), train_y.numpy(), c='#FF9359', s=50, alpha=0.2, label='train')
plt.legend(loc='upper left')
#搭建网络
class Net(nn.Module):
def __init__(self, batch_normalization=False):
super(Net, self).__init__()
self.do_bn = batch_normalization #批处理
self.fcs = []#定义两个list
self.bns = []
self.bn_input = nn.BatchNorm1d(1, momentum=0.5) #
#下面定义hiddenlayer
for i in range(N_HIDDEN): #
input_size = 1 if i == 0 else 10
fc = nn.Linear(input_size, 10)
setattr(self, 'fc%i' % i, fc) #
self._set_init(fc) #
self.fcs.append(fc)
if self.do_bn:
bn = nn.BatchNorm1d(10, momentum=0.5)
setattr(self, 'bn%i' % i, bn) #
self.bns.append(bn)
self.predict = nn.Linear(10, 1) #
self._set_init(self.predict) #
def _set_init(self, layer):
init.normal_(layer.weight, mean=0., std=.1)
init.constant_(layer.bias, B_INIT)
def forward(self, x):
pre_activation = [x]
if self.do_bn: x = self.bn_input(x) # input batch normalization
layer_input = [x]
for i in range(N_HIDDEN):
x = self.fcs[i](x)
pre_activation.append(x)
if self.do_bn: x = self.bns[i](x) # batch normalization
x = ACTIVATION(x)
layer_input.append(x)
out = self.predict(x)
return out, layer_input, pre_activation
#没有和有批处理的神经网络
nets = [Net(batch_normalization=False), Net(batch_normalization=True)]
#创建两个优化函数
opts = [torch.optim.Adam(net.parameters(), lr=LR) for net in nets]
loss_func = torch.nn.MSELoss()
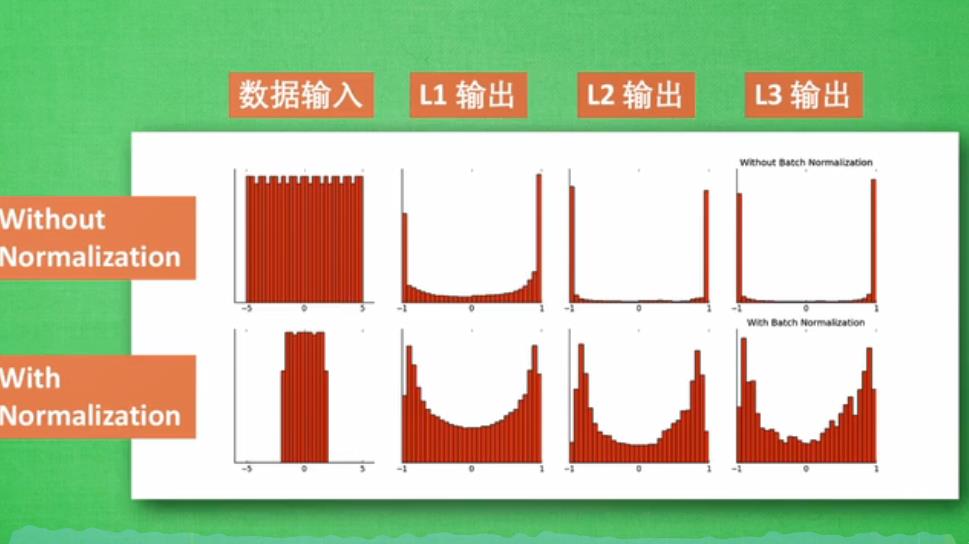
def plot_histogram(l_in, l_in_bn, pre_ac, pre_ac_bn):
for i, (ax_pa, ax_pa_bn, ax, ax_bn) in enumerate(zip(axs[0, :], axs[1, :], axs[2, :], axs[3, :])):
[a.clear() for a in [ax_pa, ax_pa_bn, ax, ax_bn]]
if i == 0:
p_range = (-7, 10);the_range = (-7, 10)
else:
p_range = (-4, 4);the_range = (-1, 1)
ax_pa.set_title('L' + str(i))
ax_pa.hist(pre_ac[i].data.numpy().ravel(), bins=10, range=p_range, color='#FF9359', alpha=0.5);ax_pa_bn.hist(pre_ac_bn[i].data.numpy().ravel(), bins=10, range=p_range, color='#74BCFF', alpha=0.5)
ax.hist(l_in[i].data.numpy().ravel(), bins=10, range=the_range, color='#FF9359');ax_bn.hist(l_in_bn[i].data.numpy().ravel(), bins=10, range=the_range, color='#74BCFF')
for a in [ax_pa, ax, ax_pa_bn, ax_bn]: a.set_yticks(());a.set_xticks(())
ax_pa_bn.set_xticks(p_range);ax_bn.set_xticks(the_range)
axs[0, 0].set_ylabel('PreAct');axs[1, 0].set_ylabel('BN PreAct');axs[2, 0].set_ylabel('Act');axs[3, 0].set_ylabel('BN Act')
plt.pause(0.01)
if __name__ == "__main__":
f, axs = plt.subplots(4, N_HIDDEN + 1, figsize=(10, 5))
plt.ion()
plt.show()
# 训练
losses = [[], []] #
for epoch in range(EPOCH):
print('Epoch: ', epoch)
layer_inputs, pre_acts = [], []
for net, l in zip(nets, losses):
net.eval() #
pred, layer_input, pre_act = net(test_x)
l.append(loss_func(pred, test_y).data.item())
layer_inputs.append(layer_input)
pre_acts.append(pre_act)
net.train() #
plot_histogram(*layer_inputs, *pre_acts) #
for step, (b_x, b_y) in enumerate(train_loader):
for net, opt in zip(nets, opts): #
pred, _, _ = net(b_x)
loss = loss_func(pred, b_y)
opt.zero_grad()
loss.backward()
opt.step() #
plt.ioff()
plt.figure(2)
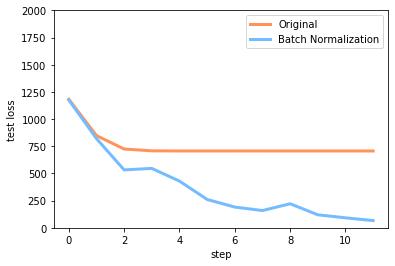
plt.plot(losses[0], c='#FF9359', lw=3, label='Original')
plt.plot(losses[1], c='#74BCFF', lw=3, label='Batch Normalization')
plt.xlabel('step');plt.ylabel('test loss');plt.ylim((0, 2000));plt.legend(loc='best')
#
#
[net.eval() for net in nets] #
preds = [net(test_x)[0] for net in nets]
plt.figure(3)
plt.plot(test_x.data.numpy(), preds[0].data.numpy(), c='#FF9359', lw=4, label='Original')
plt.plot(test_x.data.numpy(), preds[1].data.numpy(), c='#74BCFF', lw=4, label='Batch Normalization')
plt.scatter(test_x.data.numpy(), test_y.data.numpy(), c='r', s=50, alpha=0.2, label='train')
plt.legend(loc='best')
plt.show()
结果图:
学习效果:原来的神经网络死掉了,而批处理的还可以进行学习。
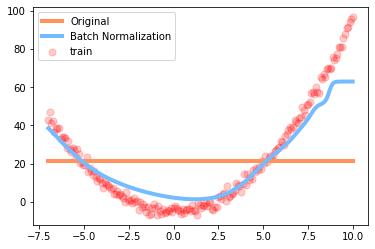
误差变换曲线:原来的误差基本不变了,批处理的还在进行学习,减小误差。
以上是关于pytorch常用normalization函数的主要内容,如果未能解决你的问题,请参考以下文章
PyTorch学习(十四)Batch_Normalization(批标准化)
PyTorch学习笔记——图像处理(transforms.Normalize 归一化)
pytorch 学习:layer normalization