《本科-线性代数笔记-精简汇总》,纯手工!
Posted talk.push
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《本科-线性代数笔记-精简汇总》,纯手工!相关的知识,希望对你有一定的参考价值。
我的线代笔记
基础知识
- 线性函数需满足可加性、齐次性。
- 向量空间的维度 = 向量空间的基的个数 = 向量组的秩

- 零向量空间是没有基的,零向量与任意向量正交,且与任意向量线性相关!
- AB均是向量空间V的基,则AB是等价向量组,他们的张成空降相同,span(A)=span(B)
- 当AB向量正交时,AB相互独立
- 使用余弦距离解释向量之间的关系:两根向量夹角越小,关系越紧密,两根向量垂直,彼此之间就没有关系,相互独立
- 如果以向量空间作为自变量,这样的函数就称为向量函数
- 有一种特殊的向量函数,其自变量是向量空间,因变量也是向量空间,这样的函数称为“矩阵函数”,通常用A表示,也就是矩阵。
- 初等行变换:在单位矩阵的行上进行倍加、倍乘、对换。
- 在单位阵上应用这三种初等行变换一次得到的矩阵称为初等行矩阵。初等行矩阵乘上矩阵A,就相当于在矩阵A上实施了对应的初等行变换。
- 同型矩阵可以相加,对应位置元素相加即可,跟向量加法运算规则一样。
- 对称矩阵:A的转置等于A,对称矩阵一定是方阵。
- 反对称矩阵:A的转置等于-A,反对称矩阵一定是方阵。
- 矩阵A左乘x,Ax可以将x逆时针旋转θ角
逆矩阵总结
- 只有方阵才能是满秩矩阵,满秩矩阵存在逆矩阵。也就是 |A|≠0
- 矮胖矩阵A(m,n),m<n不存在逆矩阵,因为利用Ax=y进行空间映射空间维度被压缩了,也就是说对于目标空间中的y坐标,在原始空间中有多个x与之对应。属于满射。
- 高瘦矩阵A(m,n),m>n不存在逆矩阵,因为在目标空间中的某个y可能找不到原始空间的某个x与之对应。比如A(3,2)映射后的目标空间是R^3,但是实际上映射的结果是R^3中的一个二维平面。在平面外的目标空间中的任意一点找不到原始空间的x与之对应。
矩阵的秩
- 列秩:即A的列空间的维度,也就是列向量组的秩,记做rank(col(A)),矩阵的列向量组线性无关则称为列满秩,单射。反之,列向量组线性相关则列不满秩,非单射,非单射则Ax=0有非零解。
- 不会升维:值域的维度小于等于定义域的维度,也就是不会出现升维的情况。
- 行秩:行向量组的秩叫做行秩,行向量组线性无关,称为行满秩。行秩=列秩。由m个行向量组成的向量组的秩为m,则行向量组满秩,即行满秩。
单射、满射、双射
- 单射:每一个y至多有一个x与之对应,对于矩阵函数Ax=y,如果定义域和值域维度相同则为单射。如果变换后值域维度缩小则不是单射。单射等价于列满秩
- 满射:每一个y至少有一个x与之对应。此时值域与到达域相等。
对于线性函数而言,满射只可能全部是一对一或全部是多对一,不会两者同时在一个映射中存在。满射等价于行满秩。
矩阵A行满秩,则Ax=b为满射,则方程存在解且不唯一。
- 双射:既是单射又是满射,称为双射,也就是一一映射。双射等价于行满秩+列满秩。既是列满秩又是行满秩(行秩=列秩)的矩阵称为“满秩矩阵”,定义域=值域=到达域。说明方阵才可能是满秩矩阵。
矩阵A若同时满足行满秩和列满秩,则Ax=b为双射,则映射为一一映射,因此方程Ax=b一定有解,且为唯一解。
| 逆矩阵<----->满秩矩阵(方阵)<----->双射 |
- 矩阵Ax的映射法则:是将标准基用A的列向量(c1,c2)来取代。比如如果c1和c2线性无关则维度保持不变为2,如果c1和c2线性相关则维度小于2.所以基向量c1、c2线性无关是单射,线性相关是非单射。
- 满秩矩阵可以看作是有限个初等矩阵的乘积,一个矩阵经过初等变换,它仍然是同型同秩矩阵。
- 矩阵列向量线性无关——>列满秩——>值域维度与定义域相同——>单射
- 矩阵列向量线性相关——>列不满秩——>值域维度降低——>非单射
- 满射<——>行满秩
- 非单非满射=行不满秩+列不满秩
线性方程组Ax=b既不是单射函数,也不是满射函数,可能没有解,也可能是多个解。
- 对矩阵函数而言,满秩矩阵是双射函数。因此,满秩矩阵存在逆矩阵
逆矩阵求法:
- 1高斯若尔当法

- 初等行变换法

- 西尔维斯特不等式:r(AB) ≥ r(A) + r(B) - n
- 求矩阵的秩的思路:将矩阵变换为阶梯矩阵形式
线性相关与线性无关
要判断一个向量组是否线性相关,归结为判断齐次线性方程组是否有非零解,若方程组有非零解,则线性相关,否则线性无关。
| A为m×n矩阵,则A^TA为可逆方阵的充要条件是,A各列线性无关。 |

矩阵函数的四个重要概念


矩阵的秩和线性方程组的解
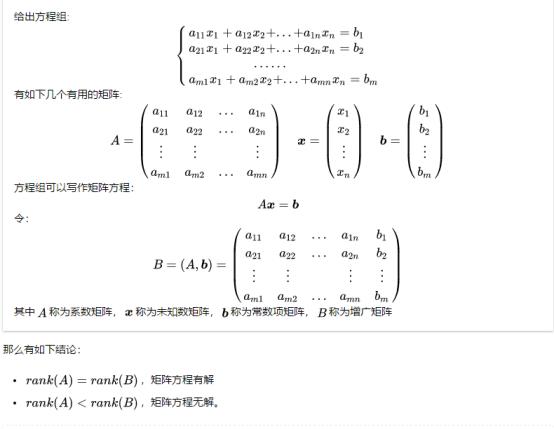
总结:
对于m*n的矩阵A的方程Ax=b,rank(A)= rank(B)时有解,且rank(A)=n时有唯一解,当rank(A)<n时有无数个解。
当A中列向量线性无关时,即A列满秩时rank(A)=rank(B)
- 非齐次矩阵方程Ax=b的解集,其实是齐次矩阵方程Ax=0的解集的平行线..非齐次矩阵方程的解集是Ax=b的特解p加上Ax=0的通解(也就是零空间N(A))
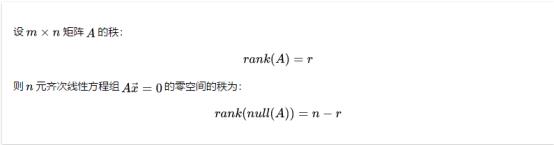
- 齐次线性方程组的基础解析的秩=n-r,其中r矩阵A的秩,n为方程组的未知数个数。
转置矩阵的性质

列空间、行空间、零空间之间的关系
- 对于矩阵Ax=y而言,列空间是值域
- 行空间和零空间都是定义域的子空间
- 当Ax=0,行空间与零空间正交

- r(行空间)+r(零空间)=n,即行空间和零空间一起构成了整个定义域。或者说行空间与零空间的秩关于定义域互补。

- 线性代数基本定理,也称为秩零定理
行列式
A满秩 <=> |A|≠0
- 行列式的目的:行列式出现的目的是为了求解线性方程组
- 逆序数:在一个排列中,如果一对数的前后位置与大小顺序相反,即前面的数大于后面的数,那么它们就称为一个逆序。一个排列中逆序的总数就称为这个排列的逆序数。
- 奇排列与偶排列
-
逆序数为奇数的排列称为奇排列,逆序数为偶数的排列称为偶排列
一个排列中任意的两个元素对换,排列改变奇偶性。
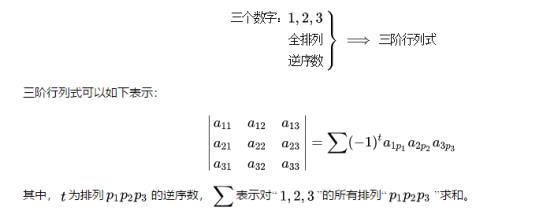
- 三阶行列式的逆序数表示法
-

-
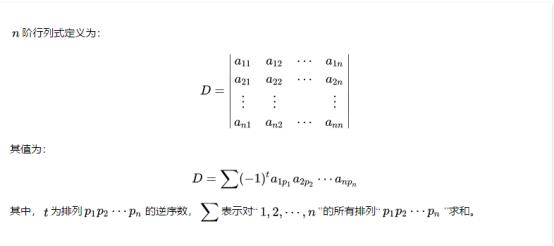
- 行列式的严格定义
-
-
- |行列式D|=|行列式D的转置|
- 只有方阵才有行列式
- A不满秩 <=> |A|=0
- 二阶行列式的三重意义:运算法则、有向面积、线性变换的伸缩比。
- 交换两行,行列式变号
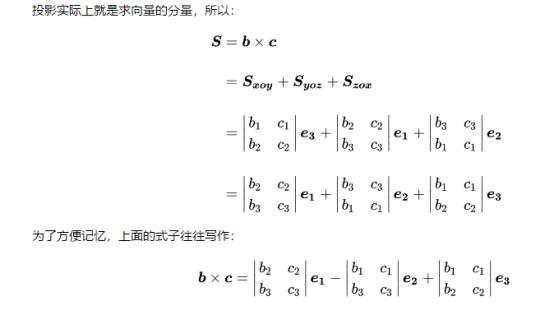
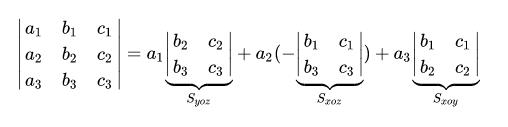
- 三维空间的有向面积公式




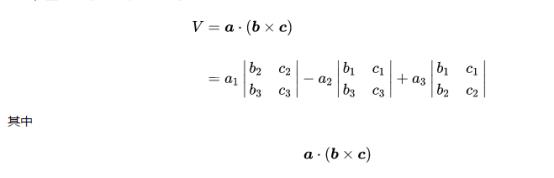
- 三阶行列式的有向体积公式
代数余子式

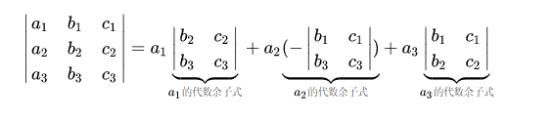
- 拉普拉斯展开

- 克莱姆法则--使用行列式解线性方程组

定义:


- 行列式的解
方阵|A|=0,则列不满秩,行不满秩,非单射,非满射。
方阵|A|≠0,则矩阵A满秩,A可逆,矩阵函数Ax=b为双射(一一映射),方程有唯一解。
方阵|A|≠0<->A满秩<->A可逆,方程Ax=b有唯一解。<->:表示为充要条件
- 伴随矩阵

- A为可逆矩阵,则(A^-1)^* = (A^*)^-1
- 伴随矩阵的秩

- 范德蒙行列式

相似矩阵和二次型
- 基变换:在同一个向量空间中的不同的基下进行坐标变换,就是基变换
- 完整的基变换图
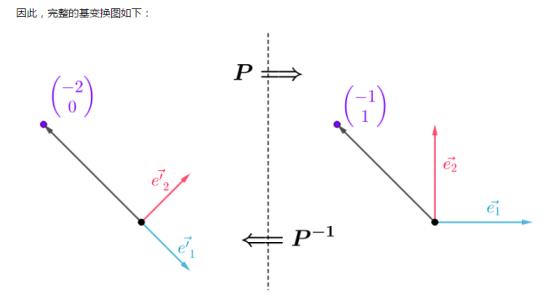
分为正向和反向两种操作,P逆矩阵可以把P所变换的坐标转回去。
- 过渡矩阵

- 存在逆矩阵的过渡矩阵是满秩矩阵
等价矩阵的定义

- 行等价与列等价
列等价:矩阵AQ相当于对A进行了初等列变换,则A~AQ
行等价:矩阵PA相当于对A进行了初等列变换,则A~PA
- 等价关系的性质
反身性:A~A
对称性:A~B,则B~A
传递性:若A~B,B~C,则A~C
- 矩阵AB等价的充要条件

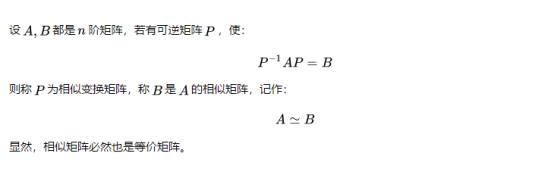
相似矩阵
相似矩阵的定义
- 几何意义
针对指定向量的同一个空间变换,用来在不同基底下进行描述的不同矩阵,彼此之间称之为相似矩阵。
相似矩阵所表示的线性变换,彼此之间称之为相似变换。
表示了矩阵向量在两个不同基底下的相似变换。
相似矩阵的性质
- 若A和B相似,则A的转置相似B的转置,A的逆相似B的逆,A^k相似B^k
- 相似矩阵的性质

相似矩阵的用途
把普通的非对角矩阵转换为与其相似的对角矩阵来进行计算处理,简化我们的过程,或者用于提取主要的特征成分等。
矩阵对角化
对角化的定义

其中△是以特征值为主对角线的对角矩阵,P是由特征向量组成的特征矩阵(或者说是过度矩阵)。对角化其实是A相似于△
对角化的条件
n阶矩阵A可以对角化的充要条件是存在n个线性无关的特征向量p1,p2,....pn

- 特征的含义
在方阵 A 的变换作用下,特征向量 p 的线性变换就是在其向量方向上进行 λλ 倍的伸缩变换。说得更直白一些,就是仅仅只有向量的长度发生改变,但是方向并不改变。具备了这种特殊性,就称之为特征。
一般来说,一个向量在某个矩阵的作用下,其空间变换反映为长度和方向的改变:即旋转、平移和拉伸,有些情况下甚至连维度都会发生变化,而这里的特殊之处就在于,矩阵作用于它的特征向量,仅仅只有长度发生了改变。
特征向量和特征值

线性变换后没有发生方向改变的向量,称为特征向量。
变换前后的伸缩比λ称为特征值。
变换前后的基相同。可表示为:(A-λI)x=0,其中x为非零向量,则(A-λI)是不可逆矩阵。
这个齐次线性方程组有非零解解的条件是:|A-λI|=0,

注意:零向量不是特征向量。同一个特征向量v不能有两个特征值.
- A和B相似,则A和B有相同的特征值,有相同的行列式|A|=|B|,有相同的迹,对任意t有tI-A相似tI-B
特征值的相关性质

☆ λ是A的特征值,那么也是A的转置的特征值,而且kλ是kA的特征值,1/λ是A逆的特征值。
- 特征值λ=0时,如果一个方阵A的某个特征值λ=0,那么Ap=0p=0,则意味着该矩阵的零空间就是特征向量p,p是非零向量。该矩阵表示的是空间压缩变换,不可逆,为奇异矩阵。
- 对角阵diag(1,2,3)表示其特征值分别是1,2,3,对应的特征向量是

- 如果矩阵 A 的特征向量为 p,特征值为λ,则它的相似矩阵的特征值不变S^-1AS,仍是λ,但是特征向量变为S^-1p。
- 不同的特征值肯定对应着线性无关的特征向量,但是不能说相同的两个特征值对应的特征向量就一定线性相关,比如我们最熟悉的单位对角矩阵diag(1,1,1),它的三个特征值都是 1,但是其特征向量分别是:

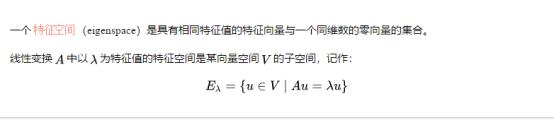
特征空间的定义
- 特征值不同---------->特征向量线性无关<---------------------->矩阵A可对角化
- 特征值相同,要判断特征空间的维度
正交阵的定义

☆ 若A,B是正交阵,则A逆是正交阵,A^n 正交阵 ,AB也是正交阵。
施密特正交化得到标准正交基

对称矩阵
对称矩阵的定义和性质
定义
一个对称矩阵通过转置操作,得到的仍然是它自身,即满足S=S^T,对称矩阵必须是方阵。
性质:
- 一个矩阵乘以自己的转置矩,即AA^T,得到的结果必然是一个对称矩阵
- 对于任意一个实数对称矩阵,都一定可以被对角化。
换句话说,对于一个对称矩阵,无论它的特征值是否重复,它的特征向量都一定线性无关。
- 实对称矩阵都可以获得一组标准正交的特征向量。
- 任何一个对称矩阵分解得到的特征向量矩阵都可以是标准正交矩阵Q

- 由上式,矩阵Q可以表示为

任意一个 n 阶对称矩阵 S,都可以分解成 n 个秩 1 方阵乘以各自权重系数 λi,然后相加的结果。

对称矩阵的对角正交化
既对角又正交的矩阵称对角正交矩阵
充要条件:
对称矩阵可以被对角正交化,矩阵可以被对角正交化也说明矩阵是对称矩阵。

正交阵:A转置=A逆
☆ 实对称矩阵特征值互不相同,对应的特征向量相互正交
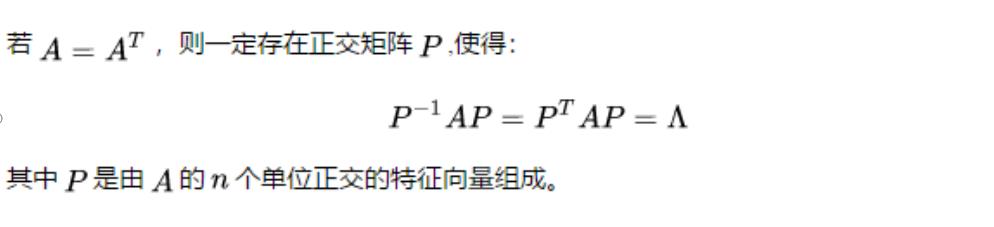
这里A为对称矩阵A=A^T,P为正交矩阵p^T=P^-1,也就是说对称矩阵A,一定存在正交矩阵P满足以上对角化公式。
二次型矩阵的性质

矩阵合同
二次型的基变换---合同矩阵

- 对称矩阵的合同矩阵也是对称矩阵
- 合同矩阵的秩相同
标准型与规范型
标准型:二次型只有二次项,就是二次型的标准型。

二次型的标准型化法
- 正交变换法
用正交变换化二次型成标准形,具有保持几何形状不变的优点

- 拉格朗日配方法
若二次型含有xi的平方项,则先把含有xi的乘积项集中,然后配方,再对其余的变量同样进行,直到都配成平方项为止。
正定矩阵
如果一个矩阵的所有特征值都为正,我们称它是“正定的”,如果均为非负(即,最小特征值为 0),相当于结论稍稍弱了一些,我们称之为“半正定的”,如果它含有负的特征值,那么它是非正定的。
那么换句话说,对于一个对称矩阵而言,从特征值的正负性角度来看的话,它一定是正定、半正定或非正定的其中一种。
对称矩阵 A^TA的所有特征值都是非负的,特别的,如果矩阵 A 的列向量线性无关,则该矩阵是正定矩阵,特征值均为正。
A^TA和 AA^T 拥有完全一样的非零特征值。
向量空间补充
矩阵A(m,n)作用下的向量映射
映射后的向量维数和原始向量维数的关系取决于 m 和 n 的关系
如果 m>n,那么目标向量的维数就大于原始向量的维数.
如果 m<n,那么目标向量的维数就小于原始向量的维数。
空间映射
☆ 矩阵A(m,n)存在映射就意味着映射后的点可以被唯一还原。
矮胖矩阵:
m<n即矩阵行数<列数,进行Ax=y映射后,x空间压缩(降维)为y,矩阵A无逆映射
高瘦矩阵:
m>n,即矩阵行数大于列数,进行Ax=y映射后,x空间上升(升维)为y,比如二维向量x经过高瘦A映射后变为三维向量空间y的一个切面(真实是二维),在切面外的点无法被唯一还原为原空间的坐标。矩阵A无可逆映射。
方块矩阵:
m=n,即矩阵行数等于列数,方阵。
当矩阵A的三个列向量线性无关的时候,矩阵A有逆映射,空间没有被压缩,也没有升维。
当矩阵A的三个列向量线性相关的时候,相当于高瘦矩阵的情况。
| 空间映射形态的决定因素:矩阵A的秩,确切的说是矩阵A线性无关的列向量的个数。 |
零空间:
记做N(A),满足Ax=0的x的集合。N(A)零空间矩阵A可逆的条件是对应的点是原空间的一个点,比如(0,0,0).
列空间:
矩阵A的每一列组成的空间,记做C(A),对于矩阵函数Ax=y而言,列空间是值域。
逆映射前提是方阵,但并非每个方阵都可逆,逆矩阵存在的条件是方阵A的各个列向量线性无关。
奇异矩阵:不可逆矩阵就叫奇异矩阵。
向量空间及其子空间
定义
R^n向量空间:R^n必须包含所有的n维向量
向量空间的定义:针对一个向量集合V,若任取V中的两个向量u和v,只要满足u+v仍然V中,同时任取标量c,只要满足cu仍然在V中,则V就构成一个向量空间
子空间:若一个向量空间U的子集V也是一个向量空间,那么V是U的子空间。
R^3空间的子空间:① R^3空间自身 ② R^3空间中过原点的平面或直线 ③ 零向量自身
| 一个向量的任意子空间都包含零向量 |
| 注意区别目标空间和映射后向量的构成空间之间的区别 |
矩阵A(m,n)的四个重要的子空间
①列空间
由A的列向量张成的空间。包含了n个m维的列向量的线性组合,记做C(A),它是R^m空间的子空间,对于一个线性方程组Ax=b,只有当向量b可以写成矩阵A的各列的线性组合,值域一定在列空间中。x1a1+x2a2+.....+xnan的方式,方程组才有解,换句话说,当且仅当b在矩阵A的列空间中时,方程才有解。
② 零空间:
所有满足 Ax=0 的向量 x 的集合就称之为矩阵 A 的零空间。
如果矩阵 A 的各列线性无关,则 x 就只有零向量这个唯一解.
如果 A 的各列线性相关,那么 x 就有非零解
零空间满足向量空间的定义,因此也是一个向量空间。
对于m×n矩阵A而言,零空间里的向量是n维的,是R^n的子空间
③ 行空间:
对于m×n矩阵A而言,矩阵各行向量所张成的空间,其实是A^T的列空间,记做C(A^T),因为行向量有n个成分,所以其行空间为R^n的子空间。
④ 左零空间
矩阵线性代数笔记整理汇总,超全面