autoware planning trajectory_smoother 模块解读
Posted 怪皮蛇皮怪
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了autoware planning trajectory_smoother 模块解读相关的知识,希望对你有一定的参考价值。
autoware planning trajectory_smoother 模块解读
说明
博主仅凭代码本身进行理解,并未对轨迹平滑,速度平滑,曲线优化等部分有任何理解(毕竟菜鸡,写这个也只是为了留个档)
如本文说明有任何问题欢迎评论提醒指点,但拒绝指指指指指指点点点点点点
总结
模块代码
该模块的功能是对已经提供出来的路径(含有速度信息的路径),进行速度上的平滑
如图
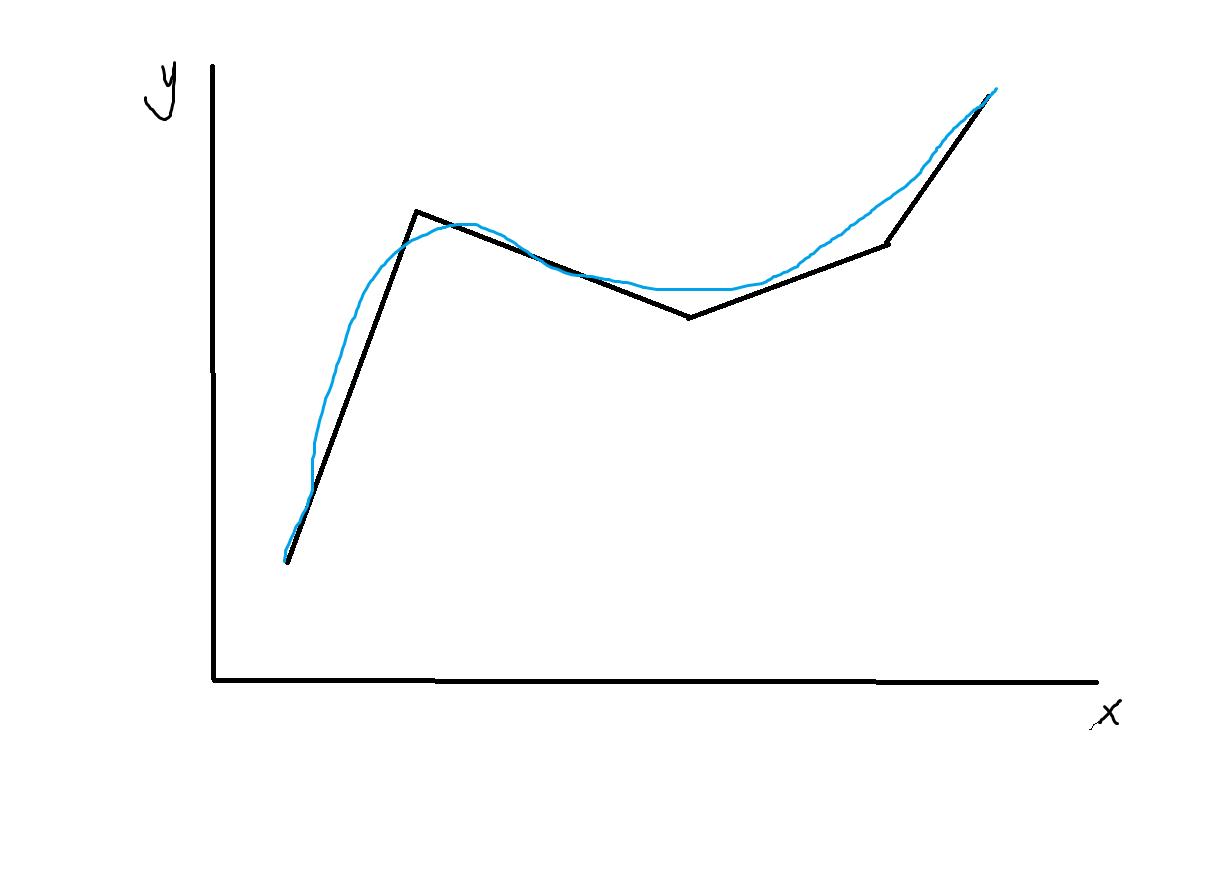
速度原本是黑色的折线,不连续,通过trajectory_smoother变成平滑的速度曲线(画的有亿点难看233)
代码解读
函数 TrajectorySmoother
该函数作用是通过指数函数生成一张权重表
TrajectorySmoother::TrajectorySmoother(TrajectorySmootherConfig config)
// 参数s 的作用是作为除数,具体用在后面的x上面
float32_t s = 2 * config.standard_deviation * config.standard_deviation;
float32_t sum = 0.0;
// Generate a gaussian filter kernel
// 这里的kernel_size应该可以理解为n,即预先定义了每个点的速度由周围n个点影响,n越大整个速度曲线会越平滑
#i从1到kernel_size就有点像是1/n,2/n,.....,(n-1)/n枚举每个点位置的权重
for (std::size_t i = 0; i < config.kernel_size; ++i)
// x是计算当前点到n/2的距离,即权重在点n/2的时候取最小(在这里是0)(但通过后面指数函数分析其实这里反而是最大的),向两边扩散时权重以平方的量级扩大
int32_t x = static_cast<int32_t>(i - config.kernel_size / 2);
// 这里就是通过指数函数的方式,利用上面制作出来的平方权重表,制造一个指数函数的权重表(什么鬼形容啊。。。)
float32_t value = std::exp(static_cast<float32_t>(-(x * x)) / s);
m_kernel.push_back(value);
sum += value;
// Normalize the kernel
//对权重表进行归一化
for (std::size_t i = 0; i < config.kernel_size; ++i)
m_kernel[i] /= sum;
总的来说这个函数最终会生成一张长度为kernel_size的权重表,其中所有权重之和为1
函数 Filter
该函数是通过预先计算好的权重表,对现有路径的速度信息进行平滑处理
void TrajectorySmoother::Filter(Trajectory & trajectory)
if (trajectory.points.size() > 2)
// zero out velocity at a few points at the end of trajectory so that the post filter velocity
// gradually ramp down to zero. The last point would have already been zeroed by the
// estimator.
//zero_run_length是速度为0的路径长度
//即路径规划到终点的时候车应该停在终点。
//但显然如果只设置终点的速度为0,而终点前的点速度是99999999的话
// 车不可能停在终点,所以设置了一个zero_run_length参数
//旨在通过一段zero_run_length长度的速度为0的路径点,让车停下来
std::size_t zero_run_length = std::min(trajectory.points.size() / 2, m_kernel.size() / 2);
for (std::size_t i = trajectory.points.size() - 1 - zero_run_length;
i < trajectory.points.size() - 1; ++i)
trajectory.points[i].longitudinal_velocity_mps = 0;
/*
这部分就是通过计算每一个点以及他前后kernel_size/2的点的加权和
重新计算路径在当前点的速度
*/
// avoid changing the start and end point of trajectory
// use same padding for points beyond either end of the trajectory
std::vector<float32_t> velocity_profile;
for (std::size_t i = 1; i < trajectory.points.size() - 1; ++i)
float32_t sum = 0;
for (std::size_t j = 0; j < m_kernel.size(); ++j)
std::int32_t points_index = static_cast<int32_t>(i - (m_kernel.size() / 2) + j);
if (points_index < 0)
points_index = 0;
else if (points_index >= static_cast<int32_t>(trajectory.points.size()))
points_index = static_cast<int32_t>(trajectory.points.size() - 1);
sum +=
trajectory.points[static_cast<std::size_t>(points_index)].longitudinal_velocity_mps *
m_kernel[j];
velocity_profile.push_back(sum);
//最后再对速度进行重新赋值回去,同时不改变初始点以及终点的速度
// Apply the velocity profile
for (std::size_t i = 1; i < trajectory.points.size() - 1; ++i)
trajectory.points[i].longitudinal_velocity_mps = velocity_profile[i - 1];
以上是关于autoware planning trajectory_smoother 模块解读的主要内容,如果未能解决你的问题,请参考以下文章