风力发电机磁悬浮轴承模型pid控制
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了风力发电机磁悬浮轴承模型pid控制相关的知识,希望对你有一定的参考价值。
1、内容简介
风力发电机磁悬浮轴承模型pid控制系统设计
318-可以交流、咨询、答疑
2、内容说明
磁悬浮轴承具有无接触、无摩擦、高速度、高精度、能耗低、不需要需润滑、无油污染、可靠性高、寿命长和密封等一系列显著的优点。将磁悬浮技术应用于风力发电机中可以降低风机切入风速、提高风机发电效率,解决了风电产业中如何高效利用风资源这一重大问题。
文章针对一种新型磁悬浮水平轴直驱式风力发电机展开研究,该风力发电机利用一个混合型轴向磁悬浮轴承和两个永磁型径向磁悬浮轴承来实现转子的五自由度悬浮。整个磁悬浮系统只需要一个位移传感器,一套控制器与功率放大器,具有成本低、结构简单、功耗小的优点。
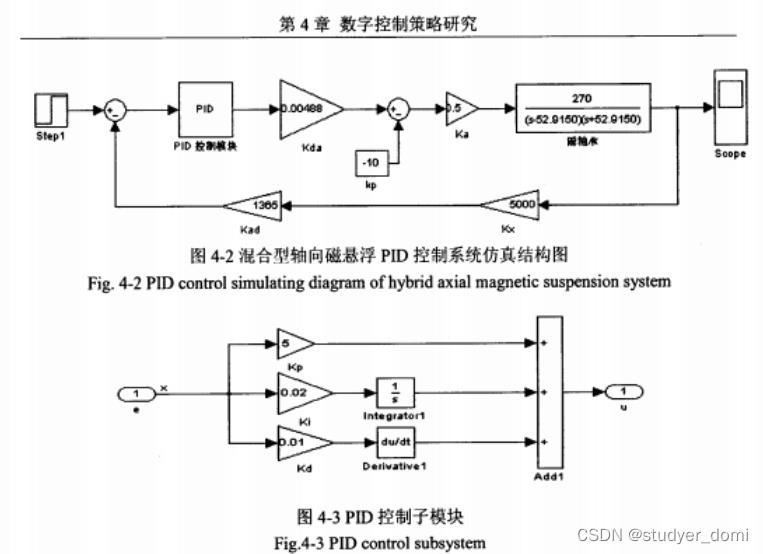
文章在对混合型磁悬浮轴承结构分析的基础上,给出混合型磁轴承参数设计与优化的方法,最终获得各个磁阻系数与漏磁系数的收敛值以及较精确的混合型磁轴承相关参数,并通过有限元仿真证明了参数的准确性。基于上述得到的轴承参数,通过有限元仿真可得轴承的位移刚度与电流刚度,从而确定了混合型磁悬浮轴承的数学模型。混合型磁悬浮轴承是开环不稳定的,必须在控制系统的协助下才能正常工作,文章给出了混合型轴向磁悬浮轴承数字控制系统结构。相对于模拟控制器来说,数字控制器硬件集成度高,控制性能好,能实现复杂的控制算法,并且方便灵活,抗干扰能力强。文章选用美国德州仪器公司TMS320F28 1 2型DSP芯片作为混合型磁悬浮轴承数字控制系统的主控芯片。并给出了基于TMS320F2812的混合型磁悬浮轴承数字控制系统的硬件设计,主要包括传感器、控制器电路(最小系统、A/D转换电路、D/A转换电路)、功率放大器等的设计。
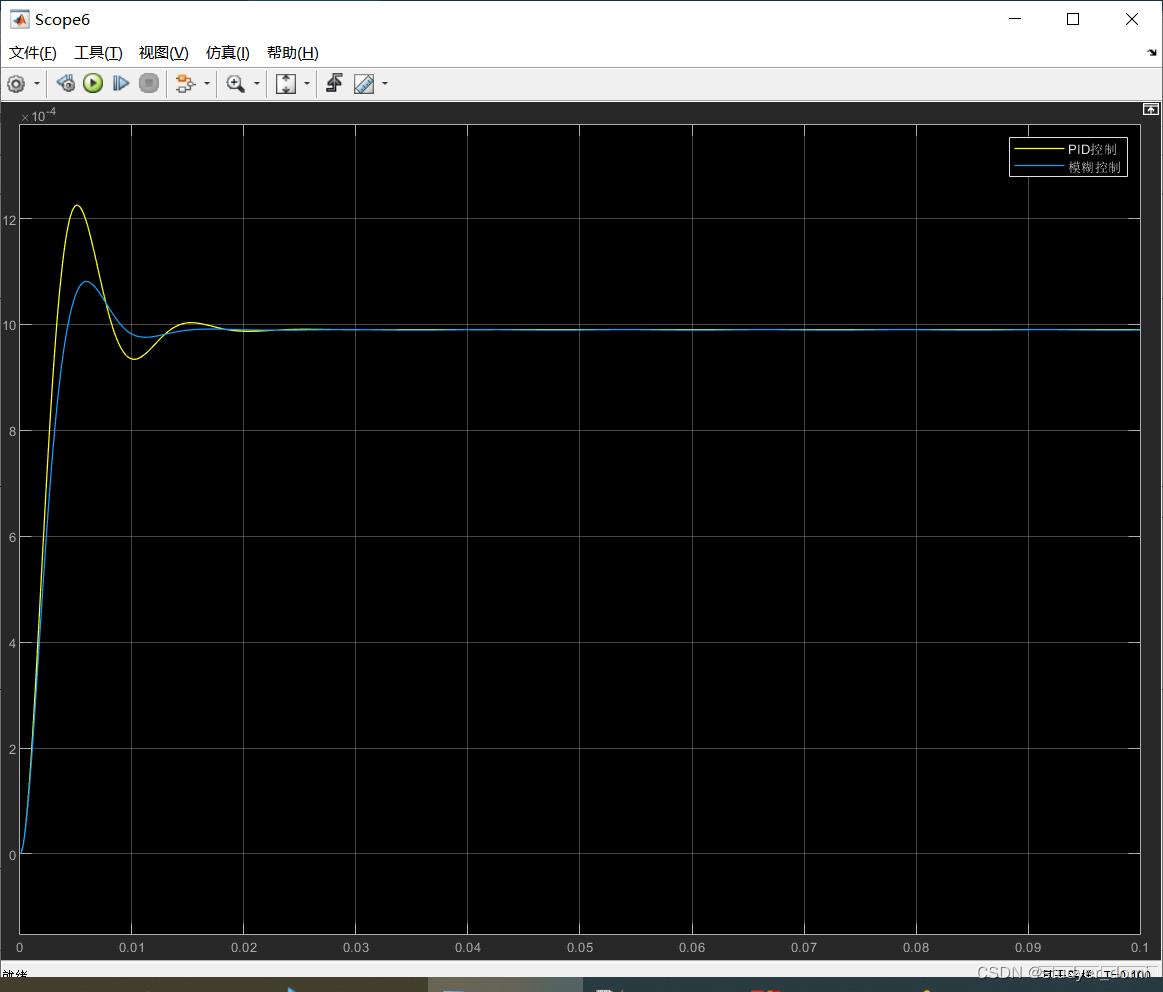
针对混合型磁悬浮轴承具有高度非线性,不确定性和难以建立精确数学模型的控制对象的特点,分别对传统PID、参数自整定模糊PID、变论域模糊PID三种控制进行了研究和分析。变论域模糊PID控制,加入了变论域的思想,由于论域的收缩而使得规则局部加细,相当于增加规则数,从而提高了控制的精度;分别建立了三种控制的Matlab仿真模型,比较仿真结果得出结论,与传统PID、自适应模糊PID控制方法相比,变论域模糊PID具有更小的超调,更快的调节速度。系统无论是动态性能还是静态性能都得到很大的改善,更能满足系统的响应需求。在已设计好的基于TMS320F2812的混合型磁悬浮轴承数字控制硬件系统的基础之上,给出了系统软件设计,采用变论域模糊PID算法控制;在搭建好的磁悬浮实验平台上,在样机处于静态的情况下进行了起浮实验和冲击实验,实验表明,该轴承控制系统能够实现转子静态时的稳定悬浮。转子处于动态旋转时系统的性能还有待进一步的实验验证,其在风力发电机的应用也有待作进一步深入的工作。

3、仿真分析

4、参考论文
风力发电机磁悬浮轴承模型pid控制系统设计.pdf
以上是关于风力发电机磁悬浮轴承模型pid控制的主要内容,如果未能解决你的问题,请参考以下文章
轴承RUL预测代码基于TCNTCN和多头注意力(TCN和Transformer的encoder结合)Transformer模型的轴承RUL预测代码(精华)