基础的强化学习(RL)算法及代码详细demo
Posted Promethe_us
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基础的强化学习(RL)算法及代码详细demo相关的知识,希望对你有一定的参考价值。
文章目录
-
gym环境: https://www.gymlibrary.dev/
-
环境安装:
-
我的版本:
package module gym 0.24.0 ale-py 0.7.5 torch 1.11.0 torchvision 0.12.0 tensorboard 2.6.0 -
安装方法:
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple gym pip install --no-index -f https://github.com/Kojoley/atari-py/releases atari_py pip install gym[atari] pip uninstall ale-py pip install ale-py安装box2d: 可能会遇到building wheel failed for box2d
在 https://www.lfd.uci.edu/~gohlke/pythonlibs/ 下载相应的 PyBox2D的whl文件 然后在命令行: pip install D:\\FILES\\PYTHON_PROJECTS\\Box2D-2.3.10-cp37-cp37m-win_amd64.whl
-
一、Sarsa (悬崖问题)
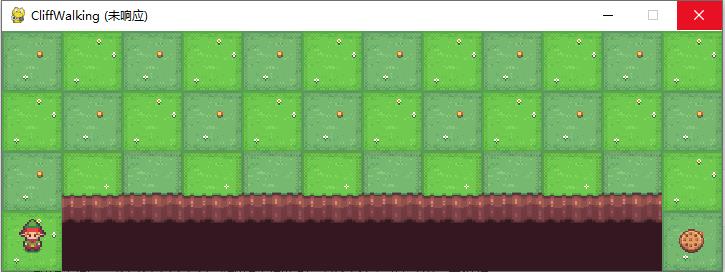
1.1 CliffWalking-v0环境介绍
在一个4x12的网格中,智能体以网格的左下角位置为起点,以网格的下角位置为终点,目标是移动智能体到达终点位置,智能体每次可以在上、下、左、右这4个方向中移动一步,每移动一步会得到 -1 的奖励。

-
如果智能体“掉入悬崖” ,会立即回到起点位置,并得到-100单位的奖励
-
当智能体移动到终点时,该回合结束,该回合总奖励为各步奖励之和
import gym
env = gym.make("CliffWalking-v0")
observation = env.reset()
env.render()
- 从起点到终点最少需要13步,每步得到-1的reward。我们的目标也是要通过RL训练出一个模型,使得该模型能在测试中一个episode的reward能够接近于-13左右。
1.2 Sarsa算法流程
算法参数: 步长 α < 1 \\alpha<1 α<1 极小值 ϵ \\epsilon ϵ (两个超参数)
对于所有 Q ( s , a ) Q(s,a) Q(s,a)随机初始化,终点处$ Q(s_end,a) = 0$
for (each trajectory):
初始化 S S S
a t = ϵ − g r e e d y ( s t ) a_t = \\epsilon -greedy \\quad(s_t) at=ϵ−greedy(st)
for (each step):
执行 a t a_t at,得到 ( r t + 1 , s t + 1 ) (r_t+1,s_t+1) (rt+1,st+1)
a t + 1 = ϵ − g r e e d y ( s t + 1 ) a_t+1 = \\epsilon -greedy \\quad(s_t+1) at+1=ϵ−greedy(st+1)
Q ( s t , a t ) = Q ( s t , a t ) + α [ r t + 1 + γ Q ( s t + 1 , a t + 1 ) − Q ( s t , a t ) ] Q(s_t,a_t)=Q(s_t,a_t)+\\alpha[r_t+1+\\gamma Q(s_t+1,a_t+1)-Q(s_t,a_t)] Q(st,at)=Q(st,at)+α[rt+1+γQ(st+1,at+1)−Q(st,at)]
s t = s t + 1 , a t = a t + 1 s_t = s_t+1,a_t = a_t+1 st=st+1,at=at+1
1.3 具体代码
import numpy as np
import gym
import time
class SarsaAgent:
def __init__(self, obs_n, act_n, learning_rate=0.01, gamma=0.9, e_greed=0.1):
self.act_n = act_n
self.lr = learning_rate
self.gamma = gamma
self.epsilon = e_greed
self.Q = np.zeros((obs_n, act_n))
# e_greed:根据s_t,选择a_t
def sample(self,obs):
if np.random.uniform(0,1) < (1.0 - self.epsilon):
action = self.predict(obs)
else:
action = np.random.choice(self.act_n) # 0,1,2,3
return action
# a_t = argmax Q(s)
def predict(self, obs):
Q_list = self.Q[obs, :] #当前s下所有a对应的Q值
maxQ = np.max(Q_list)
action_list = np.where(Q_list == maxQ)[0] # action_list=所有=Qmax的索引
action = np.random.choice(action_list)
return action
def learn(self, obs, action, reward, next_obs, next_action, done): # (S,A,R,S,A)
'''
done: episode是否结束
'''
predict_Q = self.Q[obs,action]
if done:
target_Q = reward
else:
target_Q = reward + self.gamma * self.Q[next_obs,next_action]
# 更新Q表格
self.Q[obs,action] += self.lr * (target_Q - predict_Q)
def save(self):
npy_file = './q-table.npy'
np.save(npy_file, self.Q)
print(npy_file + ' saved.')
def load(self, npy_file='./q_table.npy'):
self.Q = np.load(npy_file)
print(npy_file + ' loaded.')
def run_episode(env, agent, render=False):
total_steps = 0 # 记录当前episode走了多少step
total_reward = 0
obs = env.reset()
action = agent.sample(obs)
while True:
next_obs, reward, done, _ = env.step(action)
next_action = agent.sample(next_obs)
agent.learn(obs, action, reward, next_obs, next_action, done)
action = next_action
obs = next_obs
total_reward += reward
total_steps += 1
if render:
env.render()
time.sleep(0.)
if done:
break
return total_reward, total_steps
def test_episode(env, agent):
total_steps = 0 # 记录当前episode走了多少step
total_reward = 0
obs = env.reset()
while True:
action = agent.predict(obs)
next_obs, reward, done, _ = env.step(action)
total_reward += reward
total_steps += 1
obs = next_obs
time.sleep(0.5)
env.render()
if done:
break
return total_reward, total_steps
def main():
env = gym.make("CliffWalking-v0")
agent = SarsaAgent(obs_n=env.observation_space.n,
act_n=env.action_space.n,
learning_rate=0.025, gamma=0.9, e_greed=0.1)
for episode in range(1000):
total_reward, total_steps = run_episode(env, agent, False)
print('Episode %s: total_steps = %s , total_reward = %.1f' % (episode, total_steps, total_reward))
test_episode(env, agent)
main()
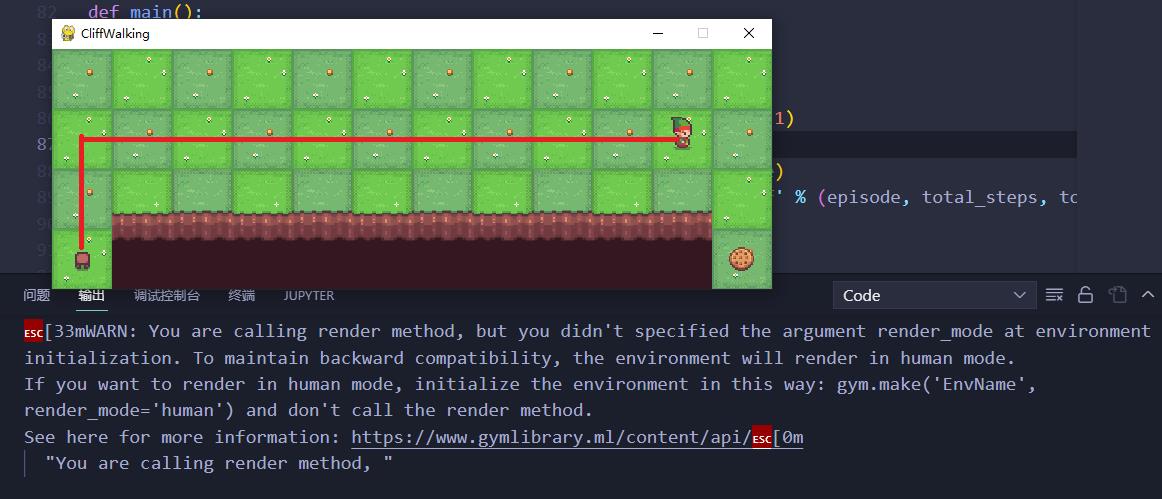
1.4 演示效果
训练了1000个episode, r e w a r d = − 23 reward=-23 reward=−23
二、Q-Learning (悬崖问题)
2.1 CliffWalking-v0环境介绍
(介绍见1.1)
2.2 Q-Learning算法流程
(Q-Learning其实真正执行的策略和Sarsa是一样的,只不过学习的策略是保守的最优策略)
算法参数: 步长 α < 1 \\alpha<1 α<1 极小值 ϵ \\epsilon ϵ (两个超参数)
对于所有 Q ( s , a ) Q(s,a) Q(s,a)随机初始化,终点处 Q ( s e n d , a ) = 0 Q(s_end,a) = 0 Q(send,a)=0
for (each trajectory):初始化 S S S
for (each step):
a t = ϵ − g r e e d y ( s t ) a_t = \\epsilon -greedy \\quad(s_t) at=ϵ−greedy(st)(行为策略)
执行 a t a_t at,得到 ( r t + 1 , s t + 1 ) (r_t+1,s_t+1) (rt+1,st+1)
Q ( s t , a t ) = Q ( s t , a t ) + α [ r t + 1 + γ m a x a Q ( s t + 1 , a ) − Q ( s t , a t ) ] Q(s_t,a_t)=Q(s_t,a_t)+\\alpha[r_t+1+\\gamma \\undersetam
分布式强化学习基础概念(Distributional RL )
分布式强化学习基础概念(Distributional RL)
from: https://mtomassoli.github.io/2017/12/08/distributional_rl/
1. Q-learning
在 Q-learning 中,我们想要优化如下的 loss:
Distributional RL 的主要思想是:to work directly with the full distribution of the return rather than with its expectation.
假设随机变量 Z(s, a) 是获得的回报(return),那么:Q(s, a) = E(Z(s, a)) ; 并非像公式(1)中所要最小化的误差那样,也就是 期望的距离。
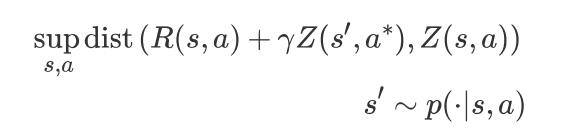
我们可以直接最小化这两个分布之间的距离,which is a distance between full distribution:
其中,R(s, a) 是即刻奖赏的随机变量,sup 是函数值的上界的意思,英文解释为:supremum。并且:
注意的是,我们依然用的是 Q(s, a),但是,此处我们尝试优化 distributions,而不是这些分布的期望。
2. Policy Evaluation:
Reference Paper:
1. https://arxiv.org/pdf/1707.06887.pdf
2. https://arxiv.org/pdf/1710.10044.pdf
以上是关于基础的强化学习(RL)算法及代码详细demo的主要内容,如果未能解决你的问题,请参考以下文章