Webots+tesla+ROS2
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Webots+tesla+ROS2相关的知识,希望对你有一定的参考价值。
参考链接:
官方更新了ROS2接口:
推荐ubuntu系统,不推荐win10/11,调试时遇到一些问题,不是全功能可用。
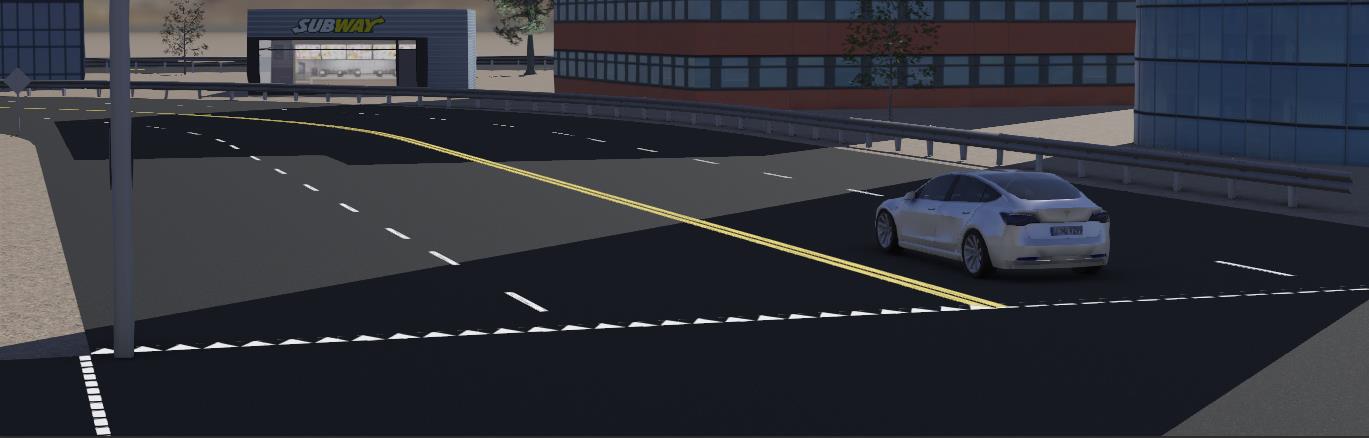
公开了 AckermannDrive 接口的 Tesla Model 3
- github.com/cyberbotics/webots_ros2/wiki/Example-Tesla-Model-3
- github.com/cyberbotics/webots_ros2/wiki/Build-and-Install
特斯拉汽车有一个具有识别能力的摄像头,以便识别道路线。
目前只有此类简单功能。
消息由 ROS 2 节点接收将使用 cv2 查找轮廓并根据图像上道路线的位置生成AckermannDrive消息。可以改进此节点以根据需要检测障碍物。
最后,一个扩展 ROS 2 接口的Python 插件订阅了AckermannDrive消息主题,并直接使用Driver API来控制特斯拉汽车。
以上是关于Webots+tesla+ROS2的主要内容,如果未能解决你的问题,请参考以下文章
如何快速解决Github下载源码编译报错并顺利运行机器人等项目案例(Webots+ROS2)
ROS2/ROS1中usb_cam对比测试与Nav2在Gazebo11和webots2021a资源消耗
机器人工程专业实践镜像2021版-含现代控制理论机器人控制器ROS2ESP32Webots和导航实践(tianbot_mini)
机器人工程专业实践镜像2021版-含现代控制理论机器人控制器ROS2ESP32Webots和导航实践(tianbot_mini)