简单的研究了一下Unity的万向锁问题
Posted liu_if_else
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了简单的研究了一下Unity的万向锁问题相关的知识,希望对你有一定的参考价值。
在Unity Editor内点击场景任意物体,在它的Inspector面板内可以查看它的transform的position,rotation和scale。
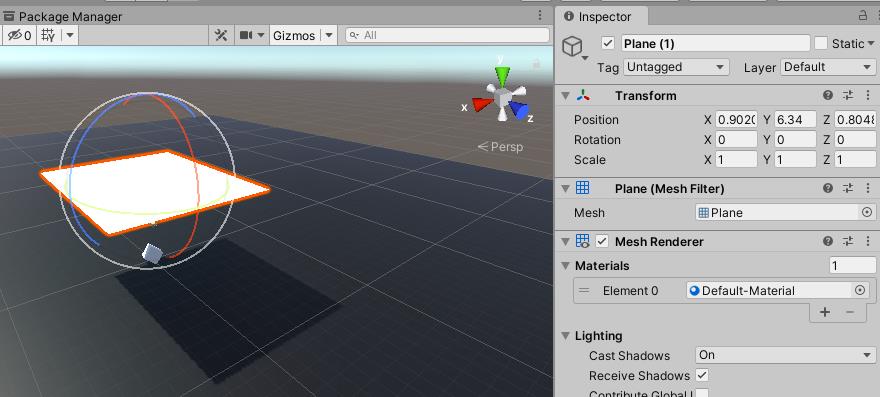
(图1:一个plane物体的Position,Rotation,Scale)
这里的Rotation格式是欧拉角,在原点角度,调整一个物体的欧拉角的xyz值有点像围绕着那个轴旋转,然而并不是。
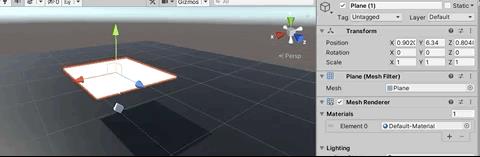
(图2:修改plane物体的Rotation.x)
在Editor内调整一个物体的欧拉角的xyz值并不是围绕着某个轴旋转。这个欧拉角的值描述的是一个物体在它的坐标系内的当前角度状态。
但是“一个物体分别围绕xyz轴转动了多少度”要比“一个物体的欧拉角是多少度”更直观好理解。比如我说一个物体在原点绕x轴转90度,基本所有人都能明白,但如果我说一个物体的欧拉角是(90,-90,-90),就会变的比较难理解,虽然它们其实是一个东西。
如果用前者,“一个物体分别围绕xyz轴转动多少度”,这种简单的不太严密的思路来理解使用欧拉角,就会出现一个问题:在某些情况下无法通过单一一个值的线性的变化去表现一个物体的旋转。例如当plane物体的x=90时,调整y或z的值,plane的旋转表现都是围绕着y轴,也既是我们无法通过调整它的欧拉角属性来让它围绕z轴旋转了。

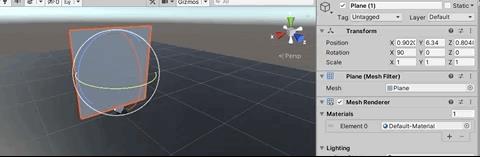
(图3:当plane的欧拉角x=90时,修改y和z的值,它都是在围绕y轴旋转)
这一特殊情况通常被称为万向锁,Gimbal Lock。我觉得万向锁这词儿有点儿夸张,在这里更通俗直观的说法应该是“通过修改欧拉角的xyz值无法随时随地很好的很方便的旋转一个物体”。
实际上Unity已经很好的规避了万向锁的问题,我们知道transform的Rotation属性的格式是Quaterion四元数。但Quaterion的xyzw的值代表的意思实在是不够直观,例如Quaterion.x的意义:
//注:Roll:围绕X轴旋转。Pitch:围绕Y轴旋转。Yaw:围绕Z轴旋转。
double cy = cos(yaw * 0.5);
double sy = sin(yaw * 0.5);
double cp = cos(pitch * 0.5);
double sp = sin(pitch * 0.5);
double cr = cos(roll * 0.5);
double sr = sin(roll * 0.5);
Quaterion.x = cr * cp * cy + sr * sp * sy;
因为它不够直观,所以Editor Inspector显示的欧拉角是从该物体的四元数值转化回来的,它主要是让你看的,当然你也可以通过赋给它一个值,Unity会转化成四元数,一次性的找到一个正确的3D角度,但它肯定不是让你像一个拉杆一样不停的旋转一个物体的。例如我们在场景中选择处在万向锁的角度的plane,手动旋转它,可以看到欧拉角的一个非线性变化。
(图4:当plane的欧拉角x=90时,增加x,它的y和z会变为90)
这说明正确的旋转物体的操作方式是在场景中手动转动,发生了线性变化的是它的四元数,进而转化出的欧拉角值发生了非线性的变化。
这也说明万向锁其实并没有锁死任何角度。就算在代码中,我们要通过欧拉角写一个动画也可以手动编程解决这一问题。1,plane物体在围绕x轴转90度。我们在Update中增量的将transform的欧拉角.x由0转到了90度。2,现在我要让它围绕z轴旋转90。如上图,我先将transform的欧拉角y和z变为90,再让x增量变化到180即可。这样,一个简单的线性增量的问题需要用很多if else去解决非线性的变化,这种编码复杂度当然是很难让人接受的。而由于Unity无法判断用户的主观意图,也无法对该类代码进行转化,就算开放一些辅助函数应该也无法太好的简化代码。
一个平滑的线性旋转变化,并可通过编程简单实现,对于与动画和编程高度结合的3D软件来讲至关重要,因此Unity选择了用四元数表示一个物体的角度。在代码中我们也只能修改一个transform的四元数rotation,并没有一个transform的欧拉角rotation这种东西。不过由于四元数的非直观性质,Edtior的Inspector显示的是它转化出的欧拉角,普通人类可读。就算在脚本中,官网也不建议在脚本中直接修改四元数的xyzw。

(图5:Quaterion的官网资料)
那么这里其他的转化与辅助函数就登场了。我一般会用Quaterion.Eular()函数将一个欧拉角作为参数赋给一个transform,例如
trans.rotation = Quaterion.Eular(new Vector3(0,30,0));
该行代码可以很直观的理解为“trans在原点围绕y轴旋转30度”(1)。使用这个函数有点像直接修改Editor Inspector内的Rotation。Quaterion.Eular()欧拉角到四元数的转换实际代码应该就是下面(2):
struct Quaternion
double w, x, y, z;
;
//Roll:围绕X轴旋转。Pitch:围绕Y轴旋转。Yaw:围绕Z轴旋转。
Quaternion ToQuaternion(double yaw, double pitch, double roll) // yaw (Z), pitch (Y), roll (X)
// Abbreviations for the various angular functions
double cy = cos(yaw * 0.5);
double sy = sin(yaw * 0.5);
double cp = cos(pitch * 0.5);
double sp = sin(pitch * 0.5);
double cr = cos(roll * 0.5);
double sr = sin(roll * 0.5);
Quaternion q;
q.w = cr * cp * cy + sr * sp * sy;
q.x = sr * cp * cy - cr * sp * sy;
q.y = cr * sp * cy + sr * cp * sy;
q.z = cr * cp * sy - sr * sp * cy;
return q;
如果需要旋转一个物体,那么有Rotate(),RotateAround()等函数,我们都可以使用欧拉角作为参数,而Unity底层负责将它转化为四元数,这样,Unity使用四元数维护一个transform的角度状态,规避了万向锁的问题,让transform可以随时自由的线性旋转。对外接口的参数使用了欧拉角,方便用户使用和理解。唯一容易发生迷惑的地方就是在Editor面板显示的transform的rotation属性。如果用户直接对它进行拉杆式操作连续旋转一个物体就有可能会观察到一个万向锁的case,但它其实是该物体的四元数转化出的一个值方便用户看的,这时候在场景中通过手动旋转物体直接修改四元数即可,Inspector的欧拉角就会回归到继续可连续旋转的角度。
参考:
(1):https://docs.unity3d.com/ScriptReference/Quaternion.Euler.html
(2):https://en.wikipedia.org/wiki/Conversion_between_quaternions_and_Euler_angles
以上是关于简单的研究了一下Unity的万向锁问题的主要内容,如果未能解决你的问题,请参考以下文章
Unity--------------------万向锁的概念