非常适合新手入门系列-神经网络part1
Posted 摸鱼小能手666
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了非常适合新手入门系列-神经网络part1相关的知识,希望对你有一定的参考价值。
这个是“非常适合新手入门系列”,这个系列专门写给大学内部分困难的课程的基础入门,帮助新手大学生解决入门时被数学公式,晦涩原理等阻挡的问题。大部分内容不涉及非常底层的原理,只是把最浅显的内容呈现出来。
想要入门最基础的神经网络之前,不能在最开始搬上来“梯度下降”,“目标损失函数”,“交叉损失函数”,“sigmoid函数”等公式,必须掌握一点基础知识:单变量线性回归,多变量线性回归,逻辑回归等。在讲解的时候我会逐渐将神经网络的相关概念展现出来。相信看完这篇文章,你在脑海中会形成神经网络的雏形。
- 现在抛出来一个问题,想要预测一个地方的房价,怎么预测?
我们从最简单的开始,假如房价只和面积有关,那我们怎么解决呢?
现在收集到三个样本:50平米的房间为50万,100平米的房间为110万,120平米的房间121万,那可以预测一下145平米的房价为多少吗?很简单,我们可以大概拟合出一条直线,x代表面积,y代表房价,这条直线基本穿过这三个样本,那么x为145时,y的值就是我们想要的结果。 这就引出了我们的part1,线性回归
单变量线性回归
- 现在抛出一个问题,现在有三个采集到的样本点,想要用最佳的一条直线去拟合出x与y之间的关系,怎么拟合最好呢?
如果拟合的结果很好,应该直线正好穿过样本点,也就是相同x下,直线的y值与样本点的y值差距为0.
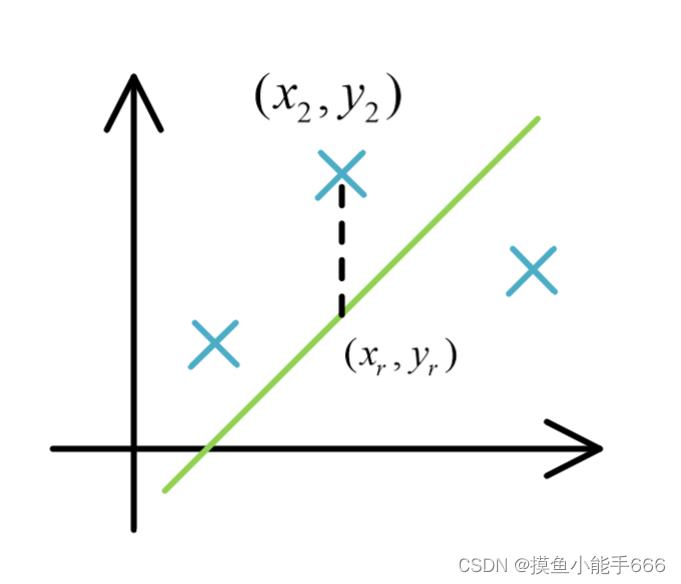
假如我以一条绿色的直线拟合,我们不妨用同样的X下,样本点的y值与直线的y值之间的距离来表示拟合的结果与预期结果的差距,我们用J来表示,第二个点与拟合曲线的距离为
J = ∣ y 2 − y r ∣ J=\\left|y_2-y_r\\right| J=∣y2−yr∣
这只是第二个点与直线的距离,如果现在有m个点,总的误差应该是各个点的求和,我们将第 i 个样本表示为 ( x ( i ) , y ( i ) ) (x^(i),y^(i)) (x(i),y(i)),拟合的直线上的值使用 h θ = θ 0 + θ 1 x ( i ) h_\\theta=\\theta_0+\\theta_1 x^(i) hθ=θ0+θ1x(i)来表示,那么误差J可以表示为
J ( θ 0 , θ 1 ) = 1 2 m ∑ i = 1 m ( θ 0 + θ 1 x ( i ) − y ( i ) ) 2 J\\left(\\theta_0, \\theta_1\\right)=\\frac12 m\\sum_i=1^m\\left(\\theta_0+\\theta_1 x^(i)-y^(i)\\right)^2 J(θ0,θ1)=2m1∑i=1m(θ0+θ1x(i)−y(i))2
为什么绝对值变成了平方?这是因为绝对值在计算时非常麻烦,将他变成平方可以有效的减少计算时带来的麻烦。为什么前面乘上了1/2m?这个是为了方便求导,平方的求导正好有一个2,和1/2抵消,m是样本个数,除以m是因为有m个求和相加,方便计算。
需要注意的一点是 x ( i ) 和 y ( i ) x^(i)和y^(i) x(i)和y(i)为常数,他是我们一个个真实观测到的样本,不是变量。这个式子里面的未知数是 θ 0 , θ 1 \\theta_0,\\theta_1 θ0,θ1,我们目的是为了求这两个变量,寻找一条最合适的直线来拟合,也就是求误差 J ( θ ) J(\\theta) J(θ)最小,我们称 J ( θ ) J(\\theta) J(θ)为损失函数
下面是求这两个变量的方法
目前这个式子还是有点复杂,我们先假设拟合直线为 h θ = θ 1 x ( i ) h_\\theta=\\theta_1 x^(i) hθ=θ1x(i)
此时
J ( θ 1 ) = m i n ( 1 2 m ∑ i = 1 m ( θ 1 x ( i ) − y ( i ) ) 2 ) J\\left(\\theta_1\\right)=min(\\frac12 m\\sum_i=1^m\\left(\\theta_1 x^(i)-y^(i)\\right)^2) J(θ1)=min(2m1∑i=1m(θ1x(i)−y(i))2)
一般,我们求函数最小值的方法是求导,算出极值点,我们顺着这个一般的思路,先把这个平方项展开,方便求导,他可以化简为
J ( θ 1 ) = a θ 1 2 + b θ 1 + c J\\left( \\theta_1\\right)=a\\theta_1^2+b\\theta_1+c J(θ1)=aθ12+bθ1+c
这里面的a,b,c等都是未知量,他里面包含着 x ( i ) 和 y ( i ) x^(i)和y^(i) x(i)和y(i)等常数。可以看到,损失函数是一个抛物线函数,求他的最低点我们可以通过求导解决,但是这里我们使用一个全新的求最低点的方法:梯度下降,这是一位大佬想出来的方法,他的表达式如下:
θ 1 = θ 1 − α ∂ J ( θ ) ∂ θ 1 \\theta_1=\\theta_1-\\alpha \\frac\\partial J(\\theta)\\partial \\theta_1 θ1=θ1−α∂θ1∂J(θ)
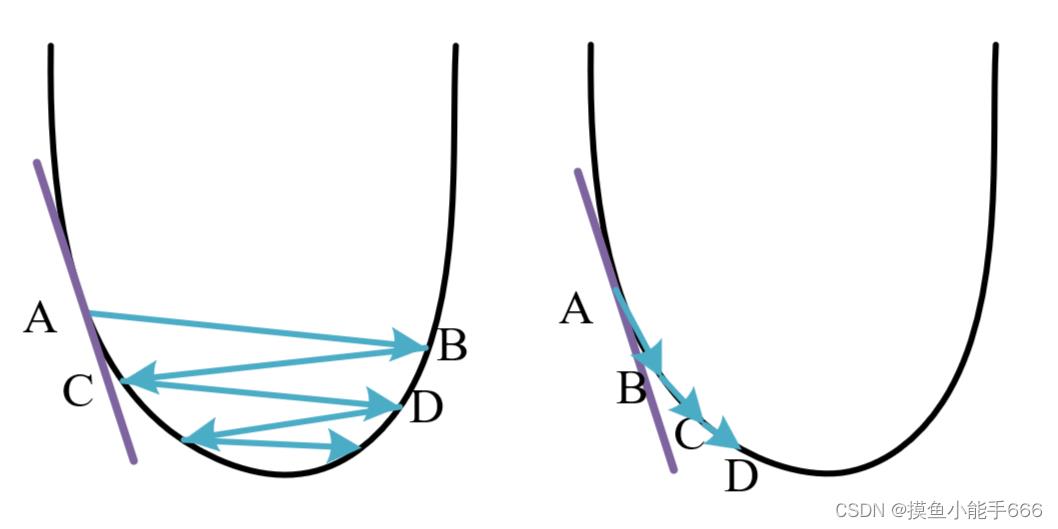
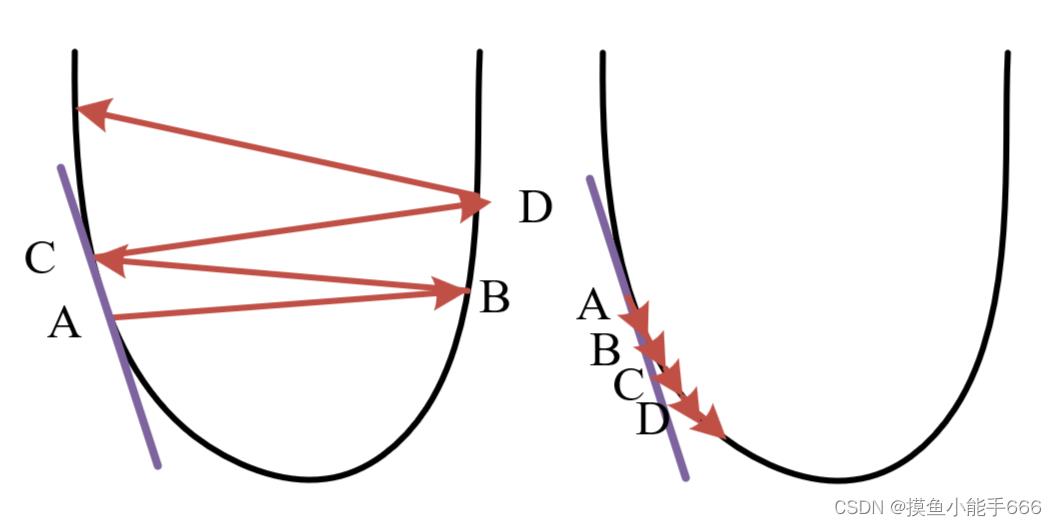
我们想求的 θ 1 \\theta_1 θ1可以通过等号右边的 θ 1 \\theta_1 θ1,也就是他自己减去 α \\alpha α乘以 J ( θ ) J(\\theta) J(θ)的求导,在一个凸函数中,函数的求导代表该点的斜率,假设初始的 θ 1 \\theta_1 θ1位于点A位置,减去该点的斜率乘以学习率 α \\alpha α( α \\alpha α的大小设置比较小时),可能会落在左图的B点,随着越来越靠近最低点,斜率慢慢减小,移动的距离会慢慢变小, θ 1 \\theta_1 θ1会逐渐移动到C,D···直至逼近最低点。如果 α \\alpha α有点大,那么他就会像右图一样移动,左右震荡慢慢趋近最小值。
仔细观察一下这个梯度下降公式,最低点右边的点的导数,也就是那个点的切线斜率,右边点的切线斜率都过一三象限,所以是正数,减去正数就是自己再往左边靠近了。同理,取到了最低点左边的点,说明取小了,也可以根据这个公式往右边靠近。
可以看到这个方法需要学习率 α \\alpha α设置比较合适,当它太大时,他会不停的左右震荡,当他过小时,他会收敛的很慢
他是一个非常适合计算机去使用的求最小值的方法,因为计算机可以很快速的完成这样一遍遍的操作,我们只需要设定一个前一轮与后一轮的差值大小为结束标志即可。
刚才我们把拟合简化成 h θ = θ 1 x ( i ) h_\\theta=\\theta_1 x^(i) hθ=θ1x(i)了,现在我们把它还原 h θ = θ 0 + θ 1 x ( i ) h_\\theta=\\theta_0+\\theta_1 x^(i) hθ=θ0+θ1x(i),看一看一条直线的梯度下降公式是什么样子的。
损失函数:
J ( θ 1 ) = m i n ( 1 2 m ∑ i = 1 m ( θ 0 + θ 1 x ( i ) − y ( i ) ) 2 ) J\\left(\\theta_1\\right)=min(\\frac12 m\\sum_i=1^m\\left(\\theta_0+\\theta_1 x^(i)-y^(i)\\right)^2) J(θ1)=Paddle入门实战系列:车牌检测与识别