嵌入式设计模式:有限状态自动机的C语言实现
Posted 嵌入式大杂烩
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了嵌入式设计模式:有限状态自动机的C语言实现相关的知识,希望对你有一定的参考价值。
👇 星标「嵌入式大杂烩」,一起进步!👇

来源:www.cnblogs.com/autosar/archive/2012/06/22/2558604.html
状态机模式是一种行为模式,在 《设计模式》 这本书中对其有详细的描述,通过多态实现不同状态的调转行为的确是一种很好的方法,只可惜在嵌入式环境下,有时只能写纯C代码,并且还需要考虑代码的重入和多任务请求跳转等情形,因此实现起来着实需要一番考虑。
近日在看了一个开源系统时,看到了一个状态机的实现,也学着写了一个,与大家分享。
首先,分析一下一个普通的状态机究竟要实现哪些内容。
状态机存储从开始时刻到现在的变化,并根据当前输入,决定下一个状态。这意味着,状态机要存储状态、获得输入(我们把它叫做跳转条件)、做出响应。
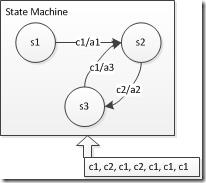
如上图所示,{s1, s2, s3}均为状态,箭头c1/a1表示在s1状态、输入为c1时,跳转到s2,并进行a1操作。
最下方为一组输入,状态机应做出如下反应:
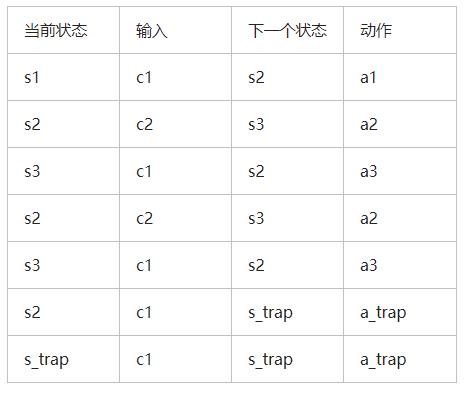
当某个状态遇到不能识别的输入时,就默认进入陷阱状态,在陷阱状态中,不论遇到怎样的输入都不能跳出。
为了表达上面这个自动机,我们定义它们的状态和输入类型:
typedef int State;
typedef int Condition;
#define STATES 3 + 1
#define STATE_1 0
#define STATE_2 1
#define STATE_3 2
#define STATE_TRAP 3
#define CONDITIONS 2
#define CONDITION_1 0
#define CONDITION_2 1在嵌入式环境中,由于存储空间比较小,因此把它们全部定义成宏。此外,为了降低执行时间的不确定性,我们使用O(1)的跳转表来模拟状态的跳转。
首先定义跳转类型:
typedef void (*ActionType)(State state, Condition condition);
typedef struct
{
State next;
ActionType action;
} Trasition, * pTrasition;然后按照上图中的跳转关系,把三个跳转加一个陷阱跳转先定义出来:
// (s1, c1, s2, a1)
Trasition t1 = {
STATE_2,
action_1
};
// (s2, c2, s3, a2)
Trasition t2 = {
STATE_3,
action_2
};
// (s3, c1, s2, a3)
Trasition t3 = {
STATE_2,
action_3
};
// (s, c, trap, a1)
Trasition tt = {
STATE_TRAP,
action_trap
};其中的动作,由用户自己完成,在这里仅定义一条输出语句。
void action_1(State state, Condition condition)
{
printf("Action 1 triggered.\\n");
}最后定义跳转表:
pTrasition transition_table[STATES][CONDITIONS] = {
/* c1, c2*/
/* s1 */&t1, &tt,
/* s2 */&tt, &t2,
/* s3 */&t3, &tt,
/* st */&tt, &tt,
};即可表达上文中的跳转关系。
最后定义状态机,如果不考虑多任务请求,那么状态机仅需要存储当前状态便行了。例如:
typedef struct
{
State current;
} StateMachine, * pStateMachine;
State step(pStateMachine machine, Condition condition)
{
pTrasition t = transition_table[machine->current][condition];
(*(t->action))(machine->current, condition);
machine->current = t->next;
return machine->current;
}但是考虑到当一个跳转正在进行的时候,同时又有其他任务请求跳转,则会出现数据不一致的问题。
举个例子:task1(s1, c1/a1 –> s2)和task2(s2, c2/a2 –> s3)先后执行,是可以顺利到达s3状态的,但若操作a1运行的时候,执行权限被task2抢占,则task2此时看到的当前状态还是s1,s1遇到c2就进入陷阱状态,而不会到达s3了,也就是说,状态的跳转发生了不确定,这是不能容忍的。
因此要重新设计状态机,增加一个“事务中”条件和一个用于存储输入的条件队列。修改后的代码如下:
#define E_OK 0
#define E_NO_DATA 1
#define E_OVERFLOW 2
typedef struct
{
Condition queue[QMAX];
int head;
int tail;
bool overflow;
} ConditionQueue, * pConditionQueue;
int push(ConditionQueue * queue, Condition c)
{
unsigned int flags;
Irq_Save(flags);
if ((queue->head == queue->tail + 1) || ((queue->head == 0) && (queue->tail == 0)))
{
queue->overflow = true;
Irq_Restore(flags);
return E_OVERFLOW;
}
else
{
queue->queue[queue->tail] = c;
queue->tail = (queue->tail + 1) % QMAX;
Irq_Restore(flags);
}
return E_OK;
}
int poll(ConditionQueue * queue, Condition * c)
{
unsigned int flags;
Irq_Save(flags);
if (queue->head == queue->tail)
{
Irq_Restore(flags);
return E_NO_DATA;
}
else
{
*c = queue->queue[queue->head];
queue->overflow = false;
queue->head = (queue->head + 1) % QMAX;
Irq_Restore(flags);
}
return E_OK;
}
typedef struct
{
State current;
bool inTransaction;
ConditionQueue queue;
} StateMachine, * pStateMachine;
static State __step(pStateMachine machine, Condition condition)
{
State current = machine -> current;
pTrasition t = transition_table[current][condition];
(*(t->action))(current, condition);
current = t->next;
machine->current = current;
return current;
}
State step(pStateMachine machine, Condition condition)
{
Condition next_condition;
int status;
State current;
if (machine->inTransaction)
{
push(&(machine->queue), condition);
return STATE_INTRANSACTION;
}
else
{
machine->inTransaction = true;
current = __step(machine, condition);
status = poll(&(machine->queue), &next_condition);
while(status == E_OK)
{
__step(machine, next_condition);
status = poll(&(machine->queue), &next_condition);
}
machine->inTransaction = false;
return current;
}
}
void initialize(pStateMachine machine, State s)
{
machine->current = s;
machine->inTransaction = false;
machine->queue.head = 0;
machine->queue.tail = 0;
machine->queue.overflow = false;
}版权归原作者所有。如涉及作品版权问题,请联系我进行删除
往期推荐:
点击阅读原文,查看更多分享
以上是关于嵌入式设计模式:有限状态自动机的C语言实现的主要内容,如果未能解决你的问题,请参考以下文章
用java开发编译器之:Thompson构造,将正则表达式转换为有限状态自动机