Nav2官方教程➡First-Time Robot Setup Guide⬅搞不定
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Nav2官方教程➡First-Time Robot Setup Guide⬅搞不定相关的知识,希望对你有一定的参考价值。
推荐下载官方包,按着教程做,需要较好的基础,步骤有些地方教程中漏了,直接原版照着做会出错的。
比如:
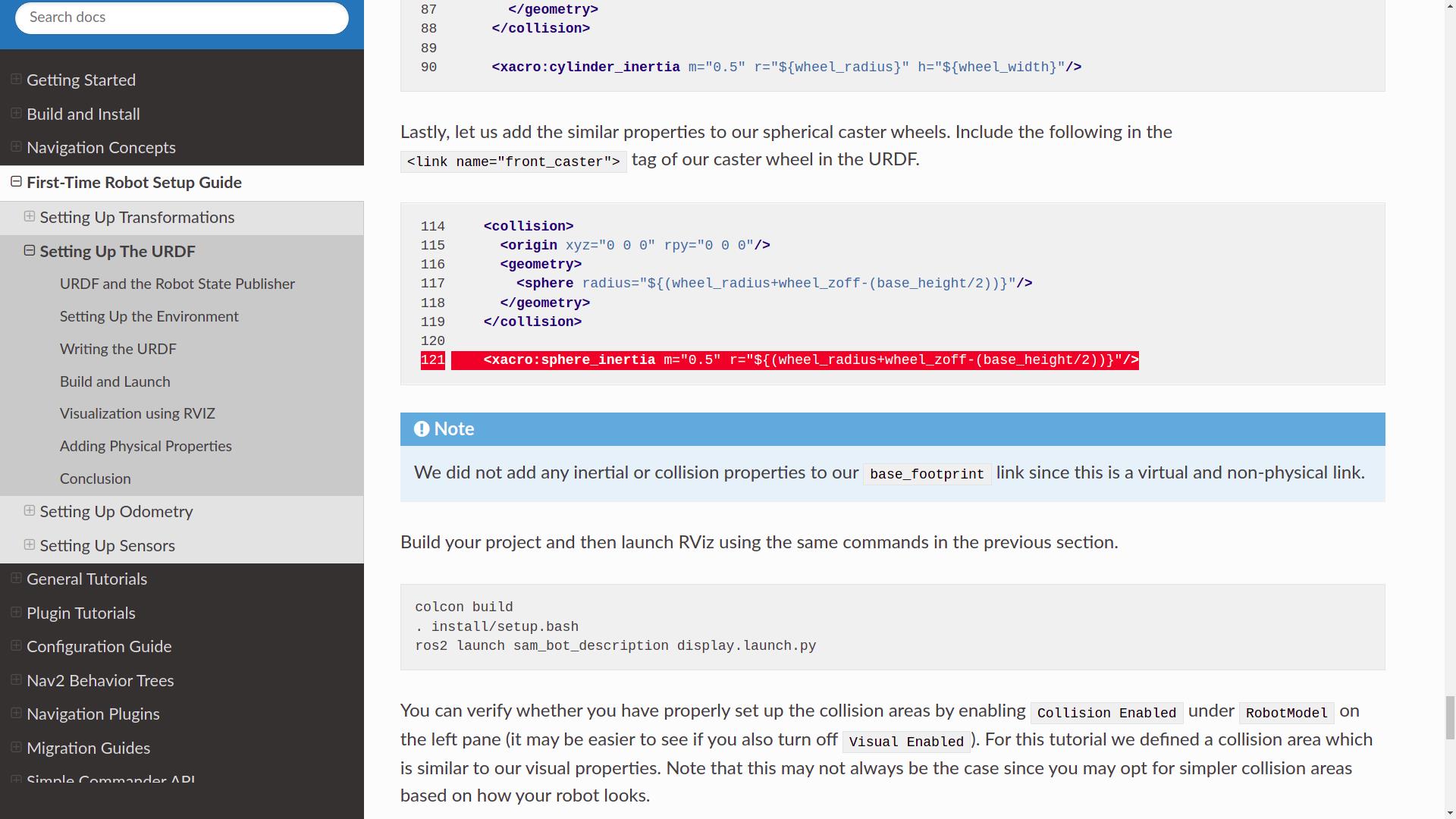
在Setting Up The URDF中:
而在Setting Up Odometry中:
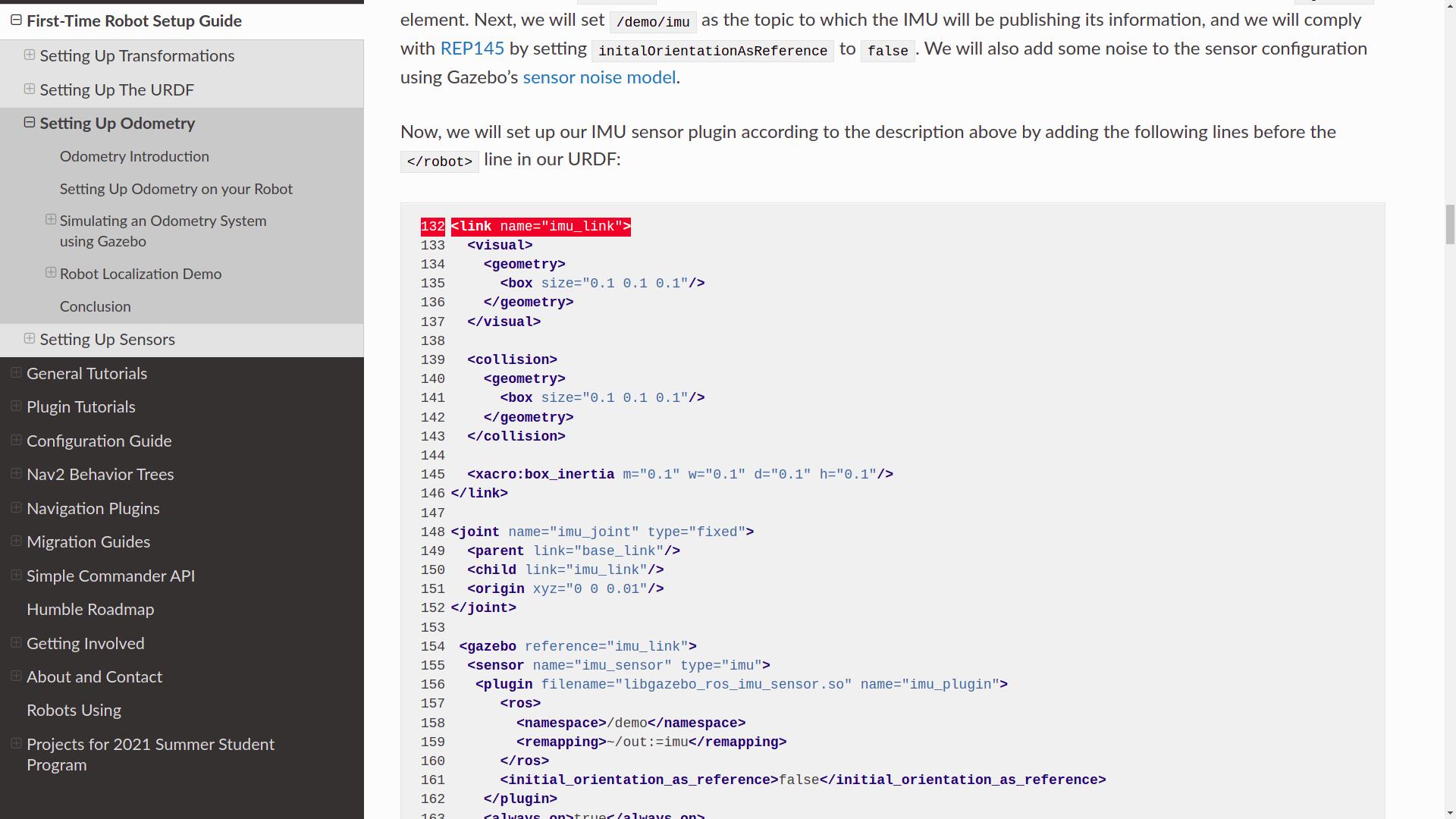
明显有些对不上,少了一些代码,需要看源码补齐,否则,运行会报错,编译不会报错。
TF2这块明显默认阅读文档者已经有比较好的基础了。
如下功能包一定要装:
- sudo apt install ros-<ros2-distro>-joint-state-publisher-gui
- sudo apt install ros-<ros2-distro>-xacro
- sudo apt install ros-<ros2-distro>-gazebo-ros-pkgs
- sudo apt install ros-<ros2-distro>-robot-localization
- sudo apt install ros-<ros2-distro>-slam-toolbox
- sudo apt install ros-<ros2-distro>-navigation2
- sudo apt install ros-<ros2-distro>-nav2-bringup
先装了在按教程步骤走!<ros2-distro>为foxy及以后版本。
 务必严格按官方教程学习,如有问题,一定看官方示例的源代码。
务必严格按官方教程学习,如有问题,一定看官方示例的源代码。
常用命令如下:
colcon build
. install/setup.bash
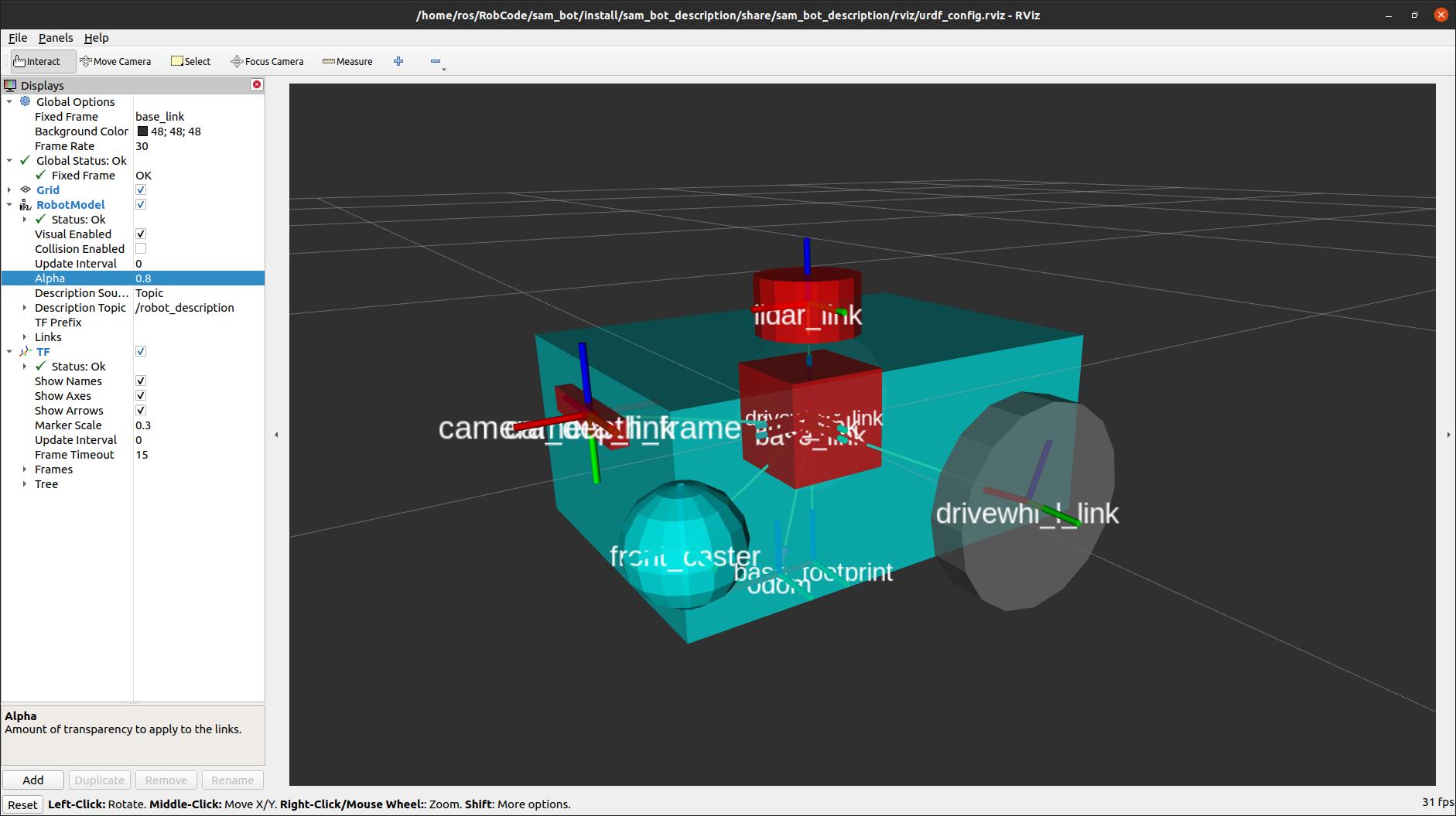
ros2 launch sam_bot_description display.launch.py
ros2 launch slam_toolbox online_async_launch.py
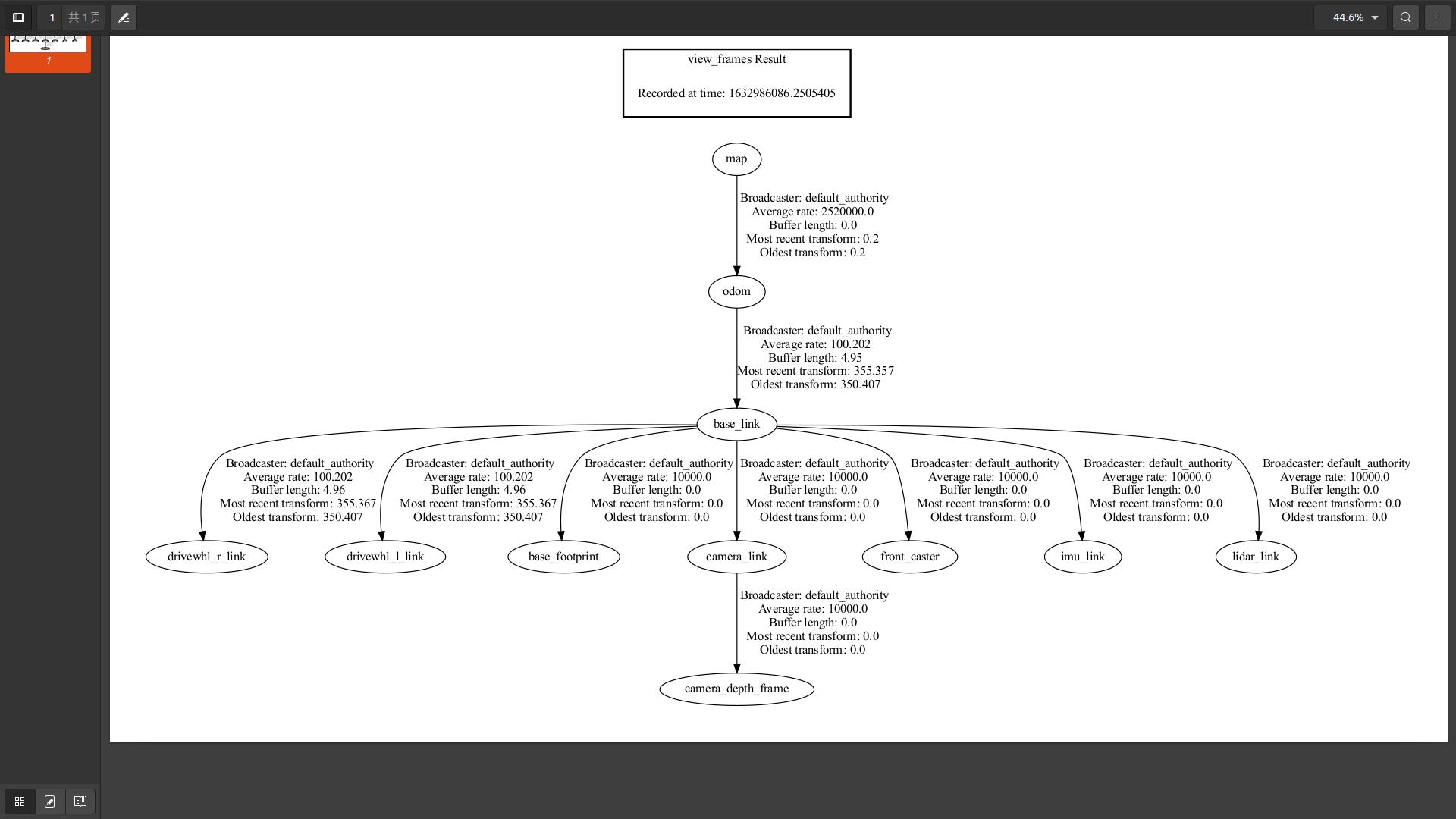
ros2 run tf2_tools view_frames.py
当然报错少不了!
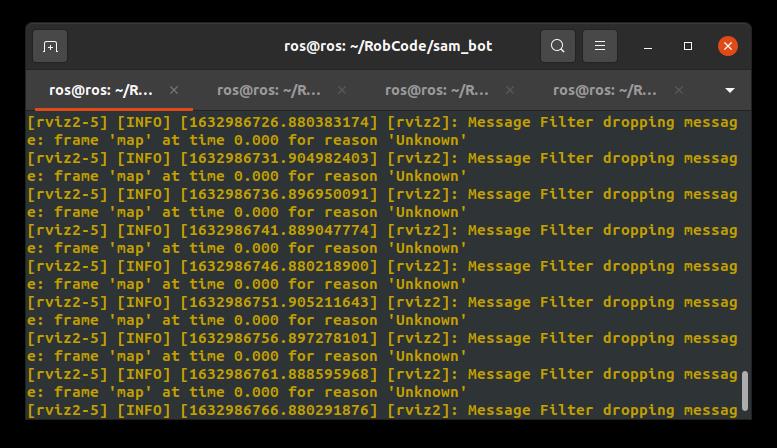
但是如果试图从官网找到答案那一定是奇妙的!
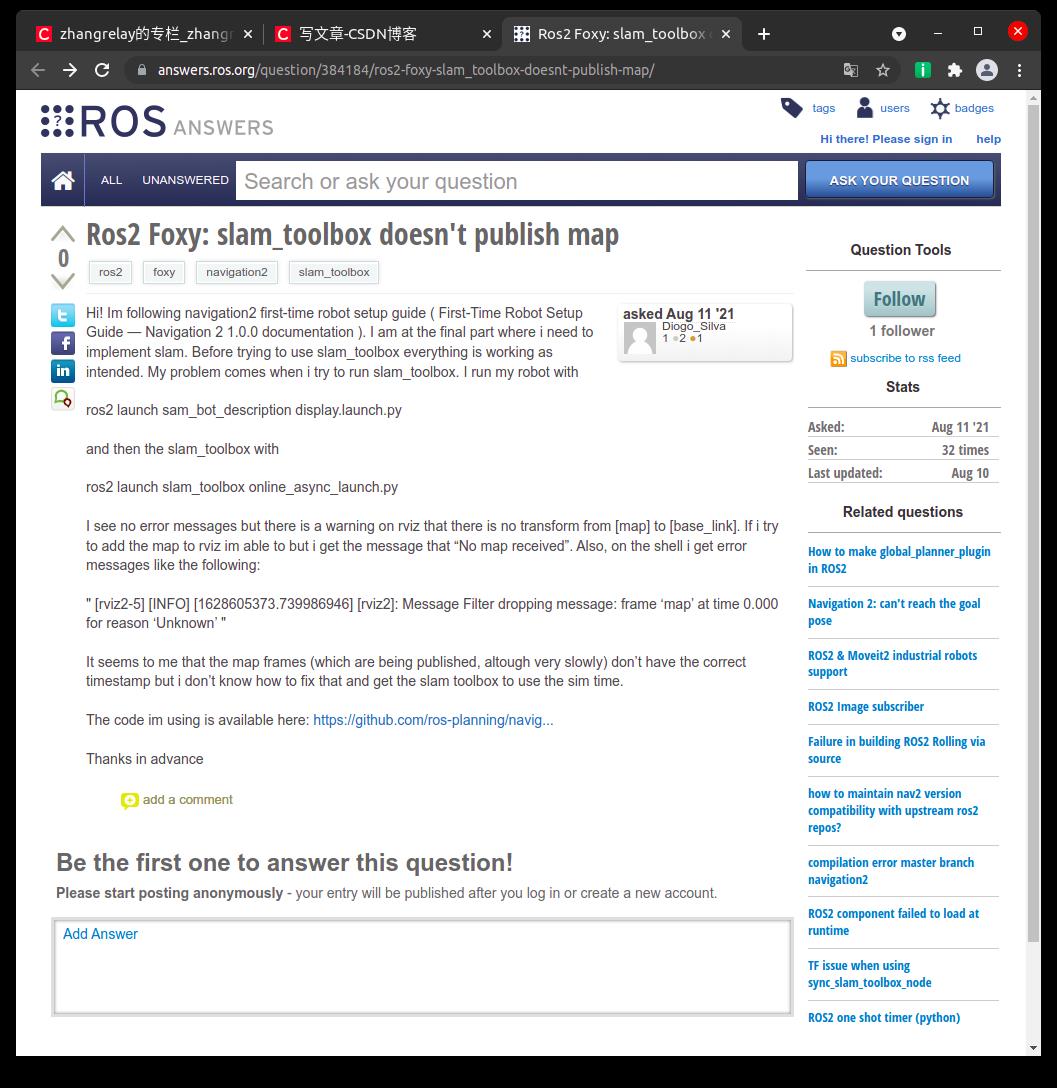
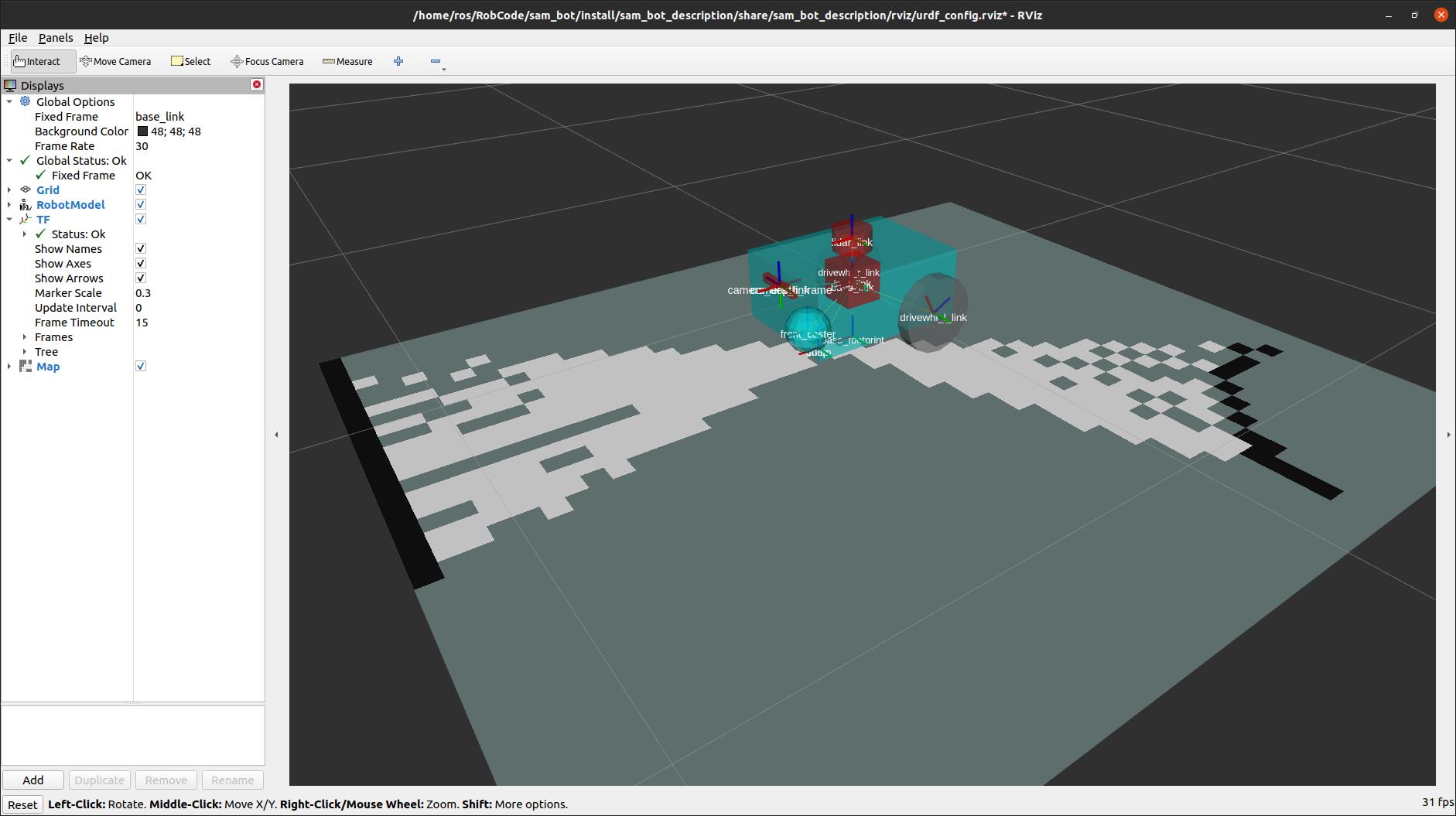
惊喜不惊喜。其实很久之前也是这样的。当然努力一把还是可以调试成功的。
后续再更新吧。
以上是关于Nav2官方教程➡First-Time Robot Setup Guide⬅搞不定的主要内容,如果未能解决你的问题,请参考以下文章