ROS2机器人实验报告提示05➡寻路⬅Nav2
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2机器人实验报告提示05➡寻路⬅Nav2相关的知识,希望对你有一定的参考价值。
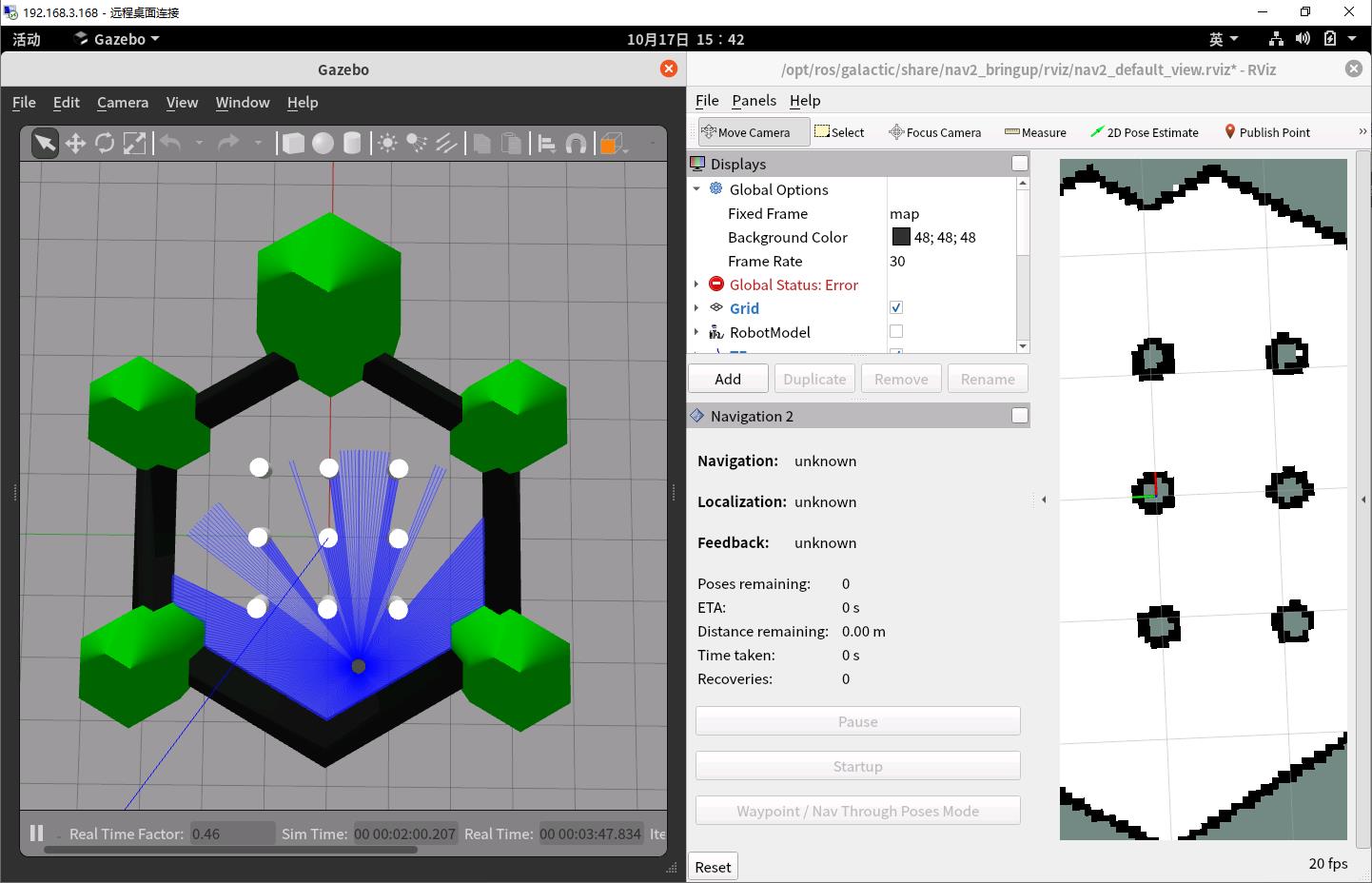
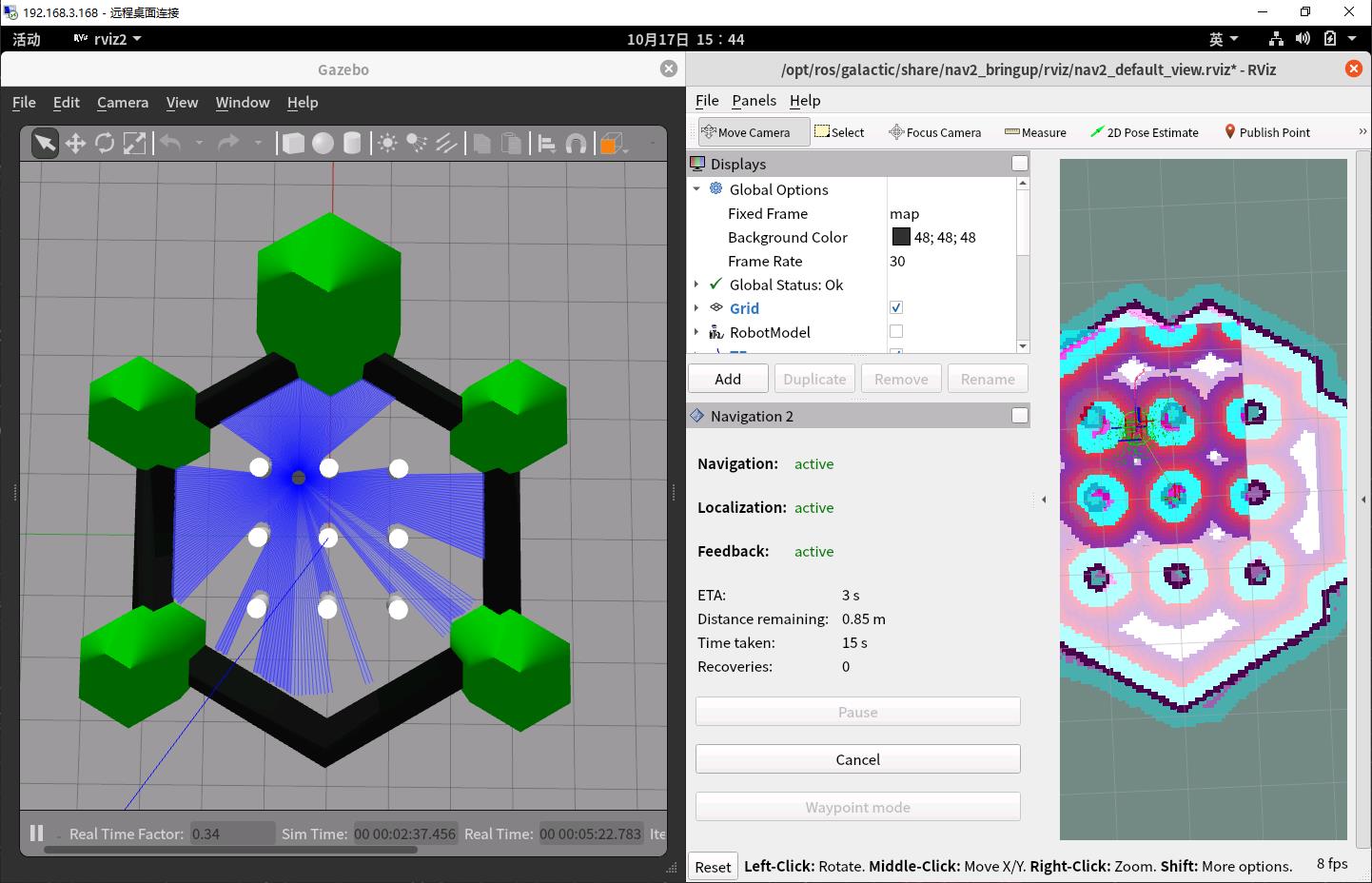
上一节,构建了有机器人和一些障碍物仿真元宇宙。
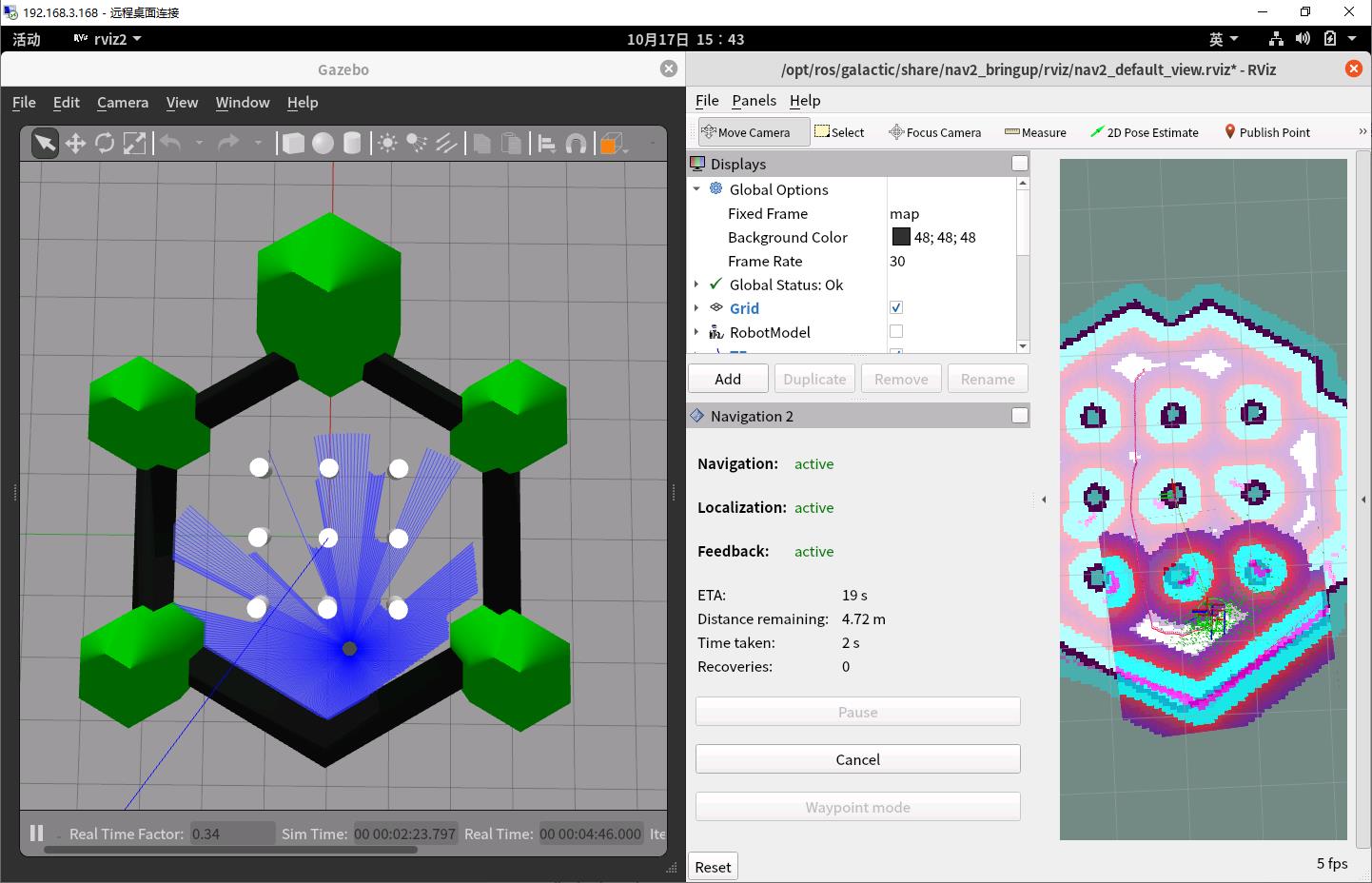
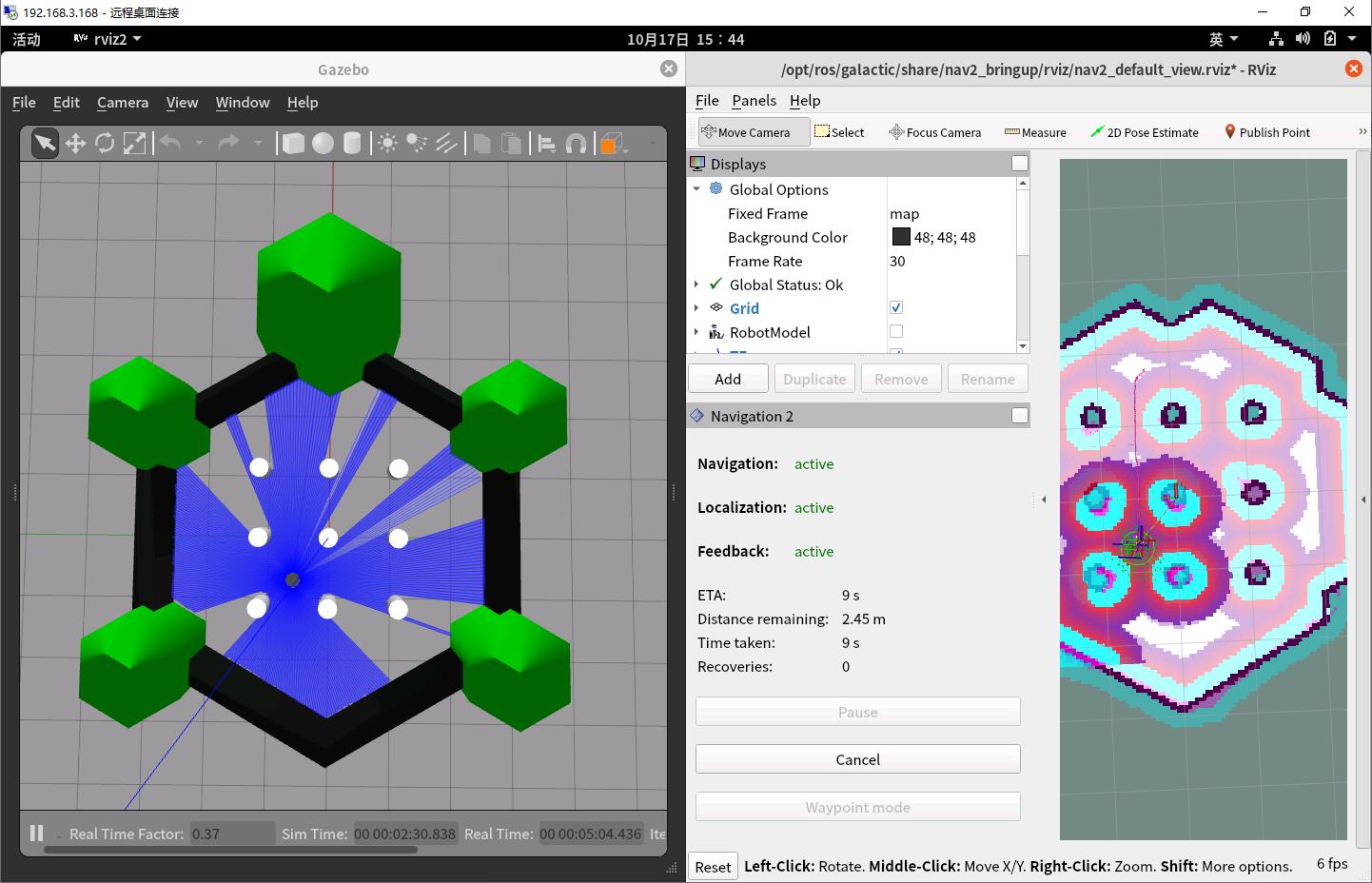
如何让机器人具备自主导航的能力呢???
先介绍偷懒的方式:
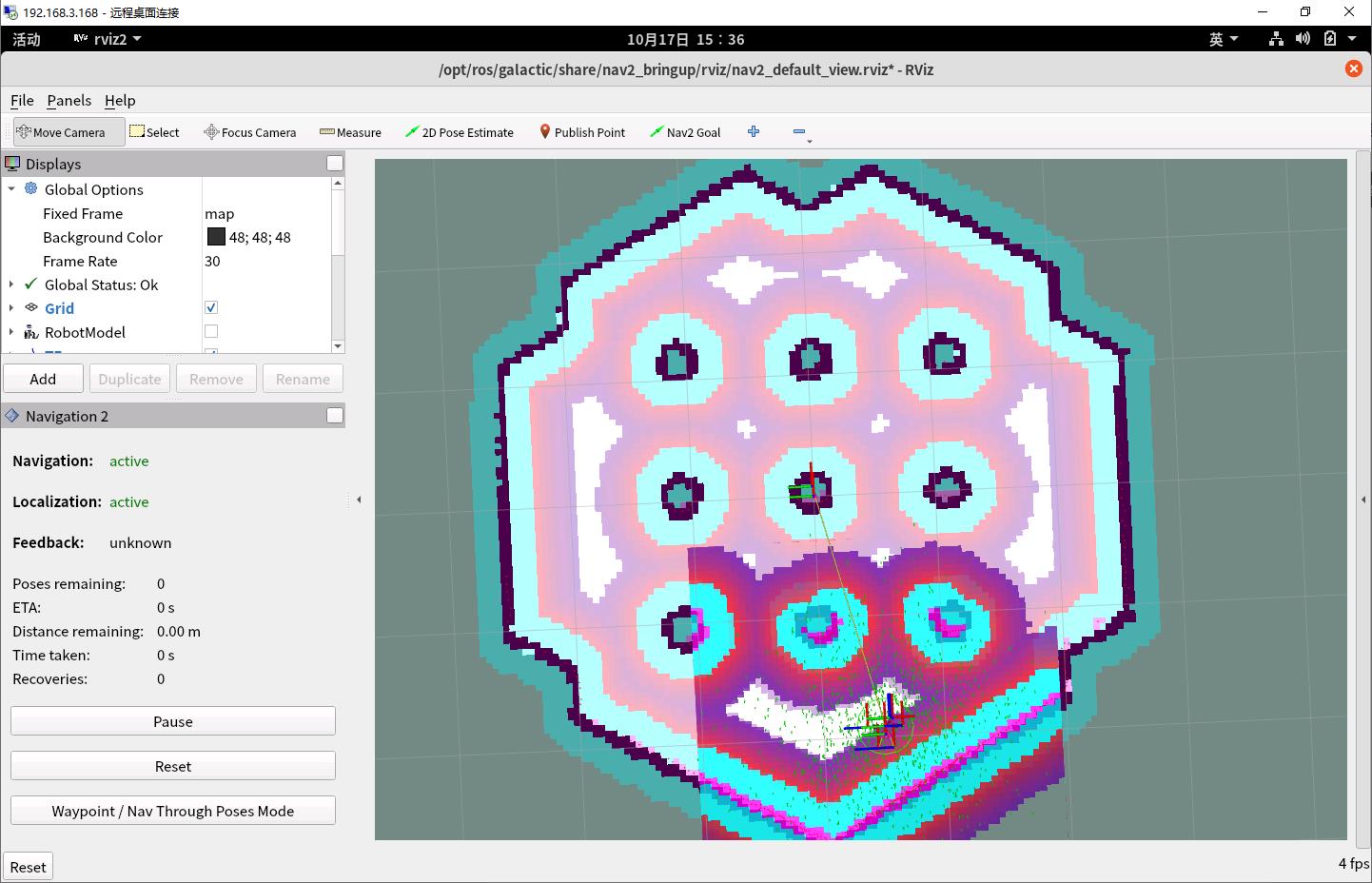
安装turtlesim3包,然后使用官方教程即可。
- sudo apt update
- sudo apt install ros-galactic-turtlebot3-gazebo ros-galactic-turtlebot3-msgs ros-galactic-turtlebot3-simulations
直接运行:
- ros2 launch nav2_bringup tb3_simulation_launch.py
查看是否报错!
如果打不开,多尝试几次!
export TURTLEBOT3_MODEL=waffle
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/opt/ros/galactic/share/turtlebot3_gazebo/models
如上环境一定要争取配置,推荐添加到bash文件中。


更多内容参考博客相关章节或观看钉钉直播课回放。
思考题:
对比ros2 launch nav2_bringup tb3_simulation_launch.py和ros2 launch sam_bot_description display.launch.py。
实现机器人自动导航,需要哪些功能包,如何实现。
tb3_simulation_launch.py
# Copyright (c) 2018 Intel Corporation
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
"""This is all-in-one launch script intended for use by nav2 developers."""
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument, ExecuteProcess, IncludeLaunchDescription
from launch.conditions import IfCondition
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration, PythonExpression
from launch_ros.actions import Node
def generate_launch_description():
# Get the launch directory
bringup_dir = get_package_share_directory('nav2_bringup')
launch_dir = os.path.join(bringup_dir, 'launch')
# Create the launch configuration variables
slam = LaunchConfiguration('slam')
namespace = LaunchConfiguration('namespace')
use_namespace = LaunchConfiguration('use_namespace')
map_yaml_file = LaunchConfiguration('map')
use_sim_time = LaunchConfiguration('use_sim_time')
params_file = LaunchConfiguration('params_file')
autostart = LaunchConfiguration('autostart')
# Launch configuration variables specific to simulation
rviz_config_file = LaunchConfiguration('rviz_config_file')
use_simulator = LaunchConfiguration('use_simulator')
use_robot_state_pub = LaunchConfiguration('use_robot_state_pub')
use_rviz = LaunchConfiguration('use_rviz')
headless = LaunchConfiguration('headless')
world = LaunchConfiguration('world')
# Map fully qualified names to relative ones so the node's namespace can be prepended.
# In case of the transforms (tf), currently, there doesn't seem to be a better alternative
# https://github.com/ros/geometry2/issues/32
# https://github.com/ros/robot_state_publisher/pull/30
# TODO(orduno) Substitute with `PushNodeRemapping`
# https://github.com/ros2/launch_ros/issues/56
remappings = [('/tf', 'tf'),
('/tf_static', 'tf_static')]
# Declare the launch arguments
declare_namespace_cmd = DeclareLaunchArgument(
'namespace',
default_value='',
description='Top-level namespace')
declare_use_namespace_cmd = DeclareLaunchArgument(
'use_namespace',
default_value='false',
description='Whether to apply a namespace to the navigation stack')
declare_slam_cmd = DeclareLaunchArgument(
'slam',
default_value='False',
description='Whether run a SLAM')
declare_map_yaml_cmd = DeclareLaunchArgument(
'map',
default_value=os.path.join(
bringup_dir, 'maps', 'turtlebot3_world.yaml'),
description='Full path to map file to load')
declare_use_sim_time_cmd = DeclareLaunchArgument(
'use_sim_time',
default_value='true',
description='Use simulation (Gazebo) clock if true')
declare_params_file_cmd = DeclareLaunchArgument(
'params_file',
default_value=os.path.join(bringup_dir, 'params', 'nav2_params.yaml'),
description='Full path to the ROS2 parameters file to use for all launched nodes')
declare_autostart_cmd = DeclareLaunchArgument(
'autostart', default_value='true',
description='Automatically startup the nav2 stack')
declare_rviz_config_file_cmd = DeclareLaunchArgument(
'rviz_config_file',
default_value=os.path.join(
bringup_dir, 'rviz', 'nav2_default_view.rviz'),
description='Full path to the RVIZ config file to use')
declare_use_simulator_cmd = DeclareLaunchArgument(
'use_simulator',
default_value='True',
description='Whether to start the simulator')
declare_use_robot_state_pub_cmd = DeclareLaunchArgument(
'use_robot_state_pub',
default_value='True',
description='Whether to start the robot state publisher')
declare_use_rviz_cmd = DeclareLaunchArgument(
'use_rviz',
default_value='True',
description='Whether to start RVIZ')
declare_simulator_cmd = DeclareLaunchArgument(
'headless',
default_value='False',
description='Whether to execute gzclient)')
declare_world_cmd = DeclareLaunchArgument(
'world',
# TODO(orduno) Switch back once ROS argument passing has been fixed upstream
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/91
# default_value=os.path.join(get_package_share_directory('turtlebot3_gazebo'),
# worlds/turtlebot3_worlds/waffle.model')
default_value=os.path.join(bringup_dir, 'worlds', 'waffle.model'),
description='Full path to world model file to load')
# Specify the actions
start_gazebo_server_cmd = ExecuteProcess(
condition=IfCondition(use_simulator),
cmd=['gzserver', '-s', 'libgazebo_ros_init.so', world],
cwd=[launch_dir], output='screen')
start_gazebo_client_cmd = ExecuteProcess(
condition=IfCondition(PythonExpression(
[use_simulator, ' and not ', headless])),
cmd=['gzclient'],
cwd=[launch_dir], output='screen')
urdf = os.path.join(bringup_dir, 'urdf', 'turtlebot3_waffle.urdf')
start_robot_state_publisher_cmd = Node(
condition=IfCondition(use_robot_state_pub),
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
namespace=namespace,
output='screen',
parameters=[{'use_sim_time': use_sim_time}],
remappings=remappings,
arguments=[urdf])
rviz_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(launch_dir, 'rviz_launch.py')),
condition=IfCondition(use_rviz),
launch_arguments={'namespace': '',
'use_namespace': 'False',
'rviz_config': rviz_config_file}.items())
bringup_cmd = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(launch_dir, 'bringup_launch.py')),
launch_arguments={'namespace': namespace,
'use_namespace': use_namespace,
'slam': slam,
'map': map_yaml_file,
'use_sim_time': use_sim_time,
'params_file': params_file,
'autostart': autostart}.items())
# Create the launch description and populate
ld = LaunchDescription()
# Declare the launch options
ld.add_action(declare_namespace_cmd)
ld.add_action(declare_use_namespace_cmd)
ld.add_action(declare_slam_cmd)
ld.add_action(declare_map_yaml_cmd)
ld.add_action(declare_use_sim_time_cmd)
ld.add_action(declare_params_file_cmd)
ld.add_action(declare_autostart_cmd)
ld.add_action(declare_rviz_config_file_cmd)
ld.add_action(declare_use_simulator_cmd)
ld.add_action(declare_use_robot_state_pub_cmd)
ld.add_action(declare_use_rviz_cmd)
ld.add_action(declare_simulator_cmd)
ld.add_action(declare_world_cmd)
# Add any conditioned actions
ld.add_action(start_gazebo_server_cmd)
ld.add_action(start_gazebo_client_cmd)
# Add the actions to launch all of the navigation nodes
ld.add_action(start_robot_state_publisher_cmd)
ld.add_action(rviz_cmd)
ld.add_action(bringup_cmd)
return ldsam_bot_description display.launch.py
import launch
from launch.substitutions import Command, LaunchConfiguration
import launch_ros
import os
def generate_launch_description():
pkg_share = launch_ros.substitutions.FindPackageShare(package='sam_bot_description').find('sam_bot_description')
default_model_path = os.path.join(pkg_share, 'src/description/sam_bot_description.urdf')
default_rviz_config_path = os.path.join(pkg_share, 'rviz/urdf_config.rviz')
world_path=os.path.join(pkg_share, 'world/my_world.sdf')
robot_state_publisher_node = launch_ros.actions.Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[{'robot_description': Command(['xacro ', LaunchConfiguration('model')])}]
)
joint_state_publisher_node = launch_ros.actions.Node(
package='joint_state_publisher',
executable='joint_state_publisher',
name='joint_state_publisher',
condition=launch.conditions.UnlessCondition(LaunchConfiguration('gui'))
)
rviz_node = launch_ros.actions.Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', LaunchConfiguration('rvizconfig')],
)
spawn_entity = launch_ros.actions.Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=['-entity', 'sam_bot', '-topic', 'robot_description'],
output='screen'
)
robot_localization_node = launch_ros.actions.Node(
package='robot_localization',
executable='ekf_node',
name='ekf_filter_node',
output='screen',
parameters=[os.path.join(pkg_share, 'config/ekf.yaml'), {'use_sim_time': LaunchConfiguration('use_sim_time')}]
)
return launch.LaunchDescription([
launch.actions.DeclareLaunchArgument(name='gui', default_value='True',
description='Flag to enable joint_state_publisher_gui'),
launch.actions.DeclareLaunchArgument(name='model', default_value=default_model_path,
description='Absolute path to robot urdf file'),
launch.actions.DeclareLaunchArgument(name='rvizconfig', default_value=default_rviz_config_path,
description='Absolute path to rviz config file'),
launch.actions.DeclareLaunchArgument(name='use_sim_time', default_value='True',
description='Flag to enable use_sim_time'),
launch.actions.ExecuteProcess(cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so', world_path], output='screen'),
joint_state_publisher_node,
robot_state_publisher_node,
spawn_entity,
robot_localization_node,
rviz_node
])能否修改sam_bot_description display.launch.py,是其不仅具备SLAM还具备导航功能呢?
?_?
^_^
以上是关于ROS2机器人实验报告提示05➡寻路⬅Nav2的主要内容,如果未能解决你的问题,请参考以下文章