ROS环境下Android客户端与ORBSLAM2
Posted 许大头
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS环境下Android客户端与ORBSLAM2相关的知识,希望对你有一定的参考价值。
ROS环境下android客户端与ORBSLAM2
ROS环境下编译ORBSLAM-2
ROS安装(Ubuntu18.04)
ORB-SLAM2 算法环境搭建
- 创建ROS workspace:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
mkdir ORB-SLAM2
- 添加环境变量:
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 安装依赖库:
sudo apt-get install libblas-dev liblapack-dev
编译Pangolin:
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev libboost-filesystem-dev
sudo apt-get install libpython2.7-dev
sudo apt-get install build-essential
cd ~/catkin_ws/ORB-SLAM2
git clone https://github.com/stevenlovegrove/Pangolin.git
cd Pangolin
mkdir build
cd build
cmake -DCPP11_NO_BOOST = 1..
make
下载Eigen 注意是3.2.10版本:
mkdir build
cd build
cmake ..
make
sudo make install
安装OpenCV:
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
mkdir release
cd release
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..
make
sudo make install
- 编译安装ORB_SLAM2:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/(user)/catkin_ws/ORB-SLAM2/Examples/ROS
cd ORB_SLAM2
chmod +x build_ros.sh
./build_ros.sh
error:uspleep()函数未定义的错误->解决方法,在报错代码文件加:
#include <unistd.h>
#include <stdio.h>
#include <stdlib.h>
- 在ROS中使用usb摄像头:
cd catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ..
catkin_make
mkdir build
cd build
cmake ..
make
查找替换摄像头:
ls /dev/video*
cd /home/pan/catkin_ws/src/usb_cam
cd launch
gedit usb_cam-test.launch
修改/dev/videoX 为支持摄像头
8. 运行指令:
roscore
roslaunch usb_cam usb_cam-test.launch
rosrun ORB_SLAM2 Mono /home/(user)/catkin_ws/src/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/(user)/catkin_ws/src/ORB_SLAM2/Examples/Monocular/MyCam.yaml
跑通Android客户端
Android客户端开源代码
Android 客户端源代码:Github
修改build的地址

PC接收侧代码:Github
保证客户端和PC在同一局域网下,修改客户端连接ip地址

RVIZ 如何接收IMU 和图像数据
- 接收IMU 数据:
ubutun安装和ROS版本一致的IMU-TOOLS
sudo apt-get install ros-melodic-imu-tools
或者
sudo apt-get install ros-kinetic-imu-tools
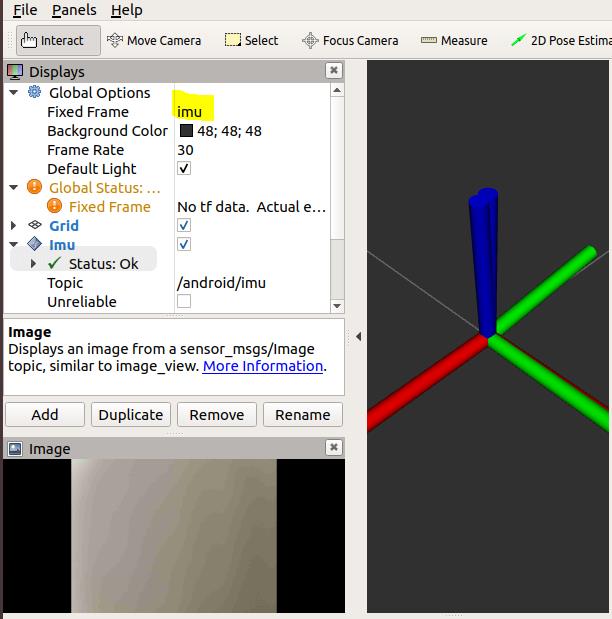
指令打开RIVZ后选择接收Add - By topic - 添加 imu
将topic选为/android/imu
且在 Global Options -> Fix Frame 中 将 map 改为 imu。
参考操作:
调试rviz,并解决问题“For frame [laser]: Fixed Frame [map] does not exist”!
- 接收图像数据
首先安装对应版本的ROS配件:
sudo apt-get install ros-indigo-image-view ros-indigo-rqt-image-view ros-indigo-image-transport-plugins
或者
sudo apt-get install ros-melodic-image-view ros-melodic-rqt-image-view ros-melodic-image-transport-plugins
在Terminal 先启动roscore 在通过rostopic list 查看已有的订阅主题
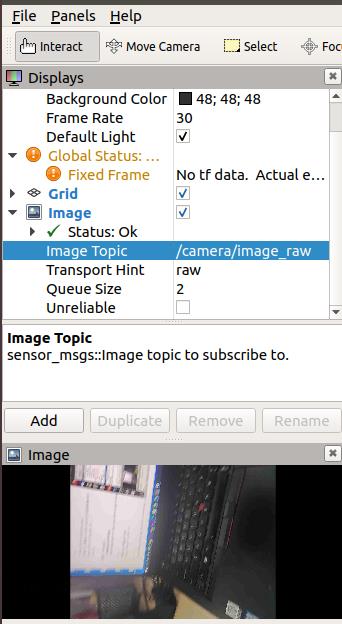
默认的image传输为compressed,因此需要做将image转换为raw格式
cd到Android_Camera-IMU-master文件夹下找android_cam-imu.launch文件,修改其中的订阅节点如下
Terminal中输入指令:roslaunch android_cam-imu.launch
Add Topic -> image -> Image Topic 设置为/camera/image_raw
Android摄像头的相机标定
github源码
相机标定模块使用说明
1. 在DASH中输入cheese打开相机,从各个角度拍摄标定棋盘10~20张,一定要变换相机姿态,减少误差。
2. 将ccheese拍摄到的图片拷贝到camera_calibration目录下,注意不要出现(.jpg命名,其中为自然数字,否则图片有可能被覆盖)。
3. 打开终端,执行./rename.sh讲图片名统一编号为自然数序列。
4. 在终端执行./camera_calibration boardWidth boardHeight squareSize frameNumber
boardWidth :棋盘横向角点数目 如:9
boardHeight :棋盘纵向角点数目 如:6
squareSize :棋盘中每个格子(要求是正方形)的实际边长,单位:mm 如:25
frameNumber:要计算的图片数量 如:17
基于ROS协议的收发数据
参考文章:知乎
在android_tutorial_camera_imu 工程下增加Talker和Listener Class:
Listener.java监听rmytopic
package org.ros.android.android_tutorial_camera_imu;
//import org.apache.commons.logging.Log;
import android.util.Log;
import org.ros.message.MessageListener;
import org.ros.namespace.GraphName;
import org.ros.node.AbstractNodeMain;
import org.ros.node.ConnectedNode;
import org.ros.node.NodeMain;
import org.ros.node.topic.Subscriber;
public class Listener extends AbstractNodeMain {
@Override
public GraphName getDefaultNodeName() {
return GraphName.of("rosjava_tutorial_pubsub/listener");
}
public void onStart(ConnectedNode connectedNode)
{
//final Log log = connectedNode.getLog();
Log.d("listener", "Node Log "+ connectedNode.getLog() + " ");
Subscriber<std_msgs.String> subscriber = connectedNode.newSubscriber("rmytopic", std_msgs.String._TYPE);
subscriber.addMessageListener(new MessageListener<std_msgs.String>() {
@Override
public void onNewMessage(std_msgs.String message) {
Log.d("listener", "I heard: \\"" + message.getData() + "\\"");
}
});
}
}
Talker.java发送至chatter
package org.ros.android.android_tutorial_camera_imu;
import org.ros.concurrent.CancellableLoop;
import org.ros.namespace.GraphName;
import org.ros.node.AbstractNodeMain;
import org.ros.node.ConnectedNode;
import org.ros.node.NodeMain;
import org.ros.node.topic.Publisher;
/**
* A simple {@link Publisher} {@link NodeMain}.
*
* @author damonkohler@google.com (Damon Kohler)
*/
public class Talker extends AbstractNodeMain {
@Override
public GraphName getDefaultNodeName() {
return GraphName.of("rosjava_tutorial_pubsub/talker");
}
@Override
public void onStart(final ConnectedNode connectedNode) {
final Publisher<std_msgs.String> publisher =
connectedNode.newPublisher("chatter", std_msgs.String._TYPE);
// This CancellableLoop will be canceled automatically when the node shuts
// down.
connectedNode.executeCancellableLoop(new CancellableLoop() {
@Override
protected void setup() {
}
@Override
public void loop() throws InterruptedException {
std_msgs.String str = publisher.newMessage();
str.setData("Hello ROS from client");
publisher.publish(str);
Thread.sleep(25000);
}
});
}
}
修改MainActivity.java
/*
* Copyright (C) 2011 Google Inc.
*
* Licensed under the Apache License, Version 2.0 (the "License"); you may not
* use this file except in compliance with the License. You may obtain a copy of
* the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS, WITHOUT
* WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. See the
* License for the specific language governing permissions and limitations under
* the License.
*/
package org.ros.android.android_tutorial_camera_imu;
import android.Manifest;
import android.annotation.TargetApi;
import android.content.Context;
import android.content.pm.PackageManager;
import android.hardware.Camera;
import android.hardware.SensorManager;
import android.location.LocationManager;
import android.os.Build;
import android.os.Bundle;
import android.support.v4.app.ActivityCompat;
import android.util.Log;
import android.view.MotionEvent;
import android.view.Window;
import android.view.WindowManager;
import android.widget.Toast;
import org.ros.address.InetAddressFactory;
import org.ros.android.RosActivity;
import org.ros.android.view.camera.RosCameraPreviewView;
import org.ros.node.NodeConfiguration;
import org.ros.node.NodeMainExecutor;
import java.util.List;
import org.ros.android.MessageCallable;
import org.ros.android.view.RosTextView;
import org.ros.android.android_tutorial_camera_imu.Talker;
/**
* @author ethan.rublee@gmail.com (Ethan Rublee)
* @author damonkohler@google.com (Damon Kohler)
* @author huaibovip@gmail.com (Charles)
*/
public class MainActivity extends RosActivity {
private int cameraId = 0;
private RosCameraPreviewView rosCameraPreviewView;
private NavSatFixPublisher fix_pub;
private ImuPublisher imu_pub;
private NodeMainExecutor nodeMainExecutor;
private LocationManager mLocationManager;
private SensorManager mSensorManager;
private RosTextView<std_msgs.String> rosTextView;
private Talker talker;
private Listener listener;
public MainActivity() {
super("ROS", "Camera & Imu");
}
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
requestWindowFeature(Window.FEATURE_NO_TITLE);
getWindow().addFlags(WindowManager.LayoutParams.FLAG_FULLSCREEN);
setContentView(R.layout.activity_main);
rosCameraPreviewView = findViewById(R.id.ros_camera_preview_view);
mLocationManager = (LocationManager) this.getSystemService(Context.LOCATION_SERVICE);
mSensorManager = (SensorManager) this.getSystemService(SENSOR_SERVICE);
rosTextView = (RosTextView<std_msgs.String>)findViewById(R.id.text);
rosTextView.setTopicName("rmytopic");
rosTextView.setMessageType(std_msgs.String._TYPE);
rosTextView.setMessageToStringCallable(new MessageCallable<String, std_msgs.String>() {
@Override
public String call(std_msgs.String message) {
return message.getData();
}
});
}
@Override
public boolean onTouchEvent(MotionEvent event) {
if (Build.VERSION.SDK_INT < Build.VERSION_CODES.P) {
if (event.getAction() == MotionEvent.ACTION_UP) {
int numberOfCameras = Camera.getNumberOfCameras();
final Toast toast;
if (numberOfCameras > 1) {
cameraId = (cameraId + 1) % numberOfCameras;
rosCameraPreviewView.releaseCamera();
rosCameraPreviewView.setCamera(getCamera());
toast = Toast.makeText(this, "Switching cameras.", Toast.LENGTH_SHORT);
} else {
toast = Toast.makeText(this, "No alternative cameras to switch to.", Toast.LENGTH_SHORT);
}
runOnUiThread(new Runnable() {
@Override
public void run() {
toast.show();
}
});
}
}
return true;
}
@Override @TargetApi(Build.VERSION_CODES.ICE_CREAM_SANDWICH_MR1) //API = 15
protected void init(NodeMainExecutor nodeMainExecutor) {
this.nodeMainExecutor = nodeMainExecutor;
if (Build.VERSION.SDK_INT >= Build.VERSION_CODES.M) {
String[] PERMISSIONS = {"", "", "", ""};
PERMISSIONS[0] = Manifest.permission.ACCESS_FINE_LOCATION;
PERMISSIONS[1] = Manifest.permission.CAMERA;
PERMISSIONS[2] = Manifest.permission.READ_EXTERNAL_STORAGE;
PERMISSIONS[3] = Manifest.permission.WRITE_EXTERNAL_STORAGE;
ActivityCompat.requestPermissions(this, PERMISSIONS, 0);
}else {
NodeConfiguration nodeConfiguration1 = NodeConfiguration.newPublic(InetAddressFactory.newNonLoopback().getHostAddress());
nodeConfiguration1.setMasterUri(getMasterUri());
nodeConfiguration1.setNodeName("android_sensors_driver_nav_sat_fix");
this.fix_pub = new NavSatFixPublisher(mLocationManager);
nodeMainExecutor.execute(this.fix_pub, nodeConfiguration1);
rosCameraPreviewView.setCamera(getCamera());
NodeConfiguration nodeConfiguration2 = NodeConfiguration.newPublic(InetAddressFactory.newNonLoopback().getHostAddress());
nodeConfiguration2.setMasterUri(getMasterUri());
nodeConfiguration2.setNodeName("android_sensors_driver_camera");
nodeMainExecutor.execute(this.rosCameraPreviewView, nodeConfiguration2);
}
NodeConfiguration nodeConfiguration3 = NodeConfiguration.newPublic(InetAddressFactory.newNonLoopback().getHostAddress());
nodeConfiguration3.setMasterUri(getMasterUri());
nodeConfiguration3.setNodeName("android_sensors_driver_imu");
this.imu_pub = new ImuPublisher(mSensorManager);
nodeMainExecutor.execute(this.imu_pub, nodeConfiguration3);
talker = new Talker();
listener = new Listener();
NodeConfiguration nodeConfiguration4 = NodeConfiguration.newPublic(InetAddressFactory.newNonLoopback().getHostAddress());
nodeConfiguration4.setMasterUri(getMasterUri());
NodeConfiguration nodeConfiguration5 = NodeConfiguration.newPublic(InetAddressFactory.newNonLoopback().getHostAddress());
nodeConfiguration5.setMasterUri(getMasterUri());
nodeMainExecutor.execute(talker, nodeConfiguration4);
nodeMainExecutor.execute(listener,nodeConfiguration5);
nodeMainExecutor.execute(rosTextView,nodeConfiguration4);
}
private void executeGPS() {
NodeConfiguration nodeConfiguration1 = NodeConfiguration.newPublic(InetAddressFactory.newNonLoopback()以上是关于ROS环境下Android客户端与ORBSLAM2的主要内容,如果未能解决你的问题,请参考以下文章