技术分享 | Windows下ROS如何与Matlab的联合仿真
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了技术分享 | Windows下ROS如何与Matlab的联合仿真相关的知识,希望对你有一定的参考价值。
众所周知Matlab是一款功能强大的软件,你能想到的他几乎都能实现,虽然平时都是在Linux环境下使用ROS, Matlab则在windows下使用,但是今天我们的开发都是在windows环境下。
1. Windows环境下的ROS安装 首先需要安装VS2017或者vs2019,笔者使用的是VS2017社区版(就是免费那个),roS在windows下的编译依赖VS的SDK。 然后安装ROS,目前Windows下的ROS也能像其他程序一样使用安装包安装了。
链接:https://pan.baidu.com/s/1_Q2Hi6ANEgtgC1Kc9_t6WA 提取码:o47z
解压后在 rosfoxyandmelodic\\ros-melodic-desktop_full\\tools 下找到setup.exe 完成安装 目前ROS版本只支持安装在C:\\opt中,所以需要C盘有一定的空间。 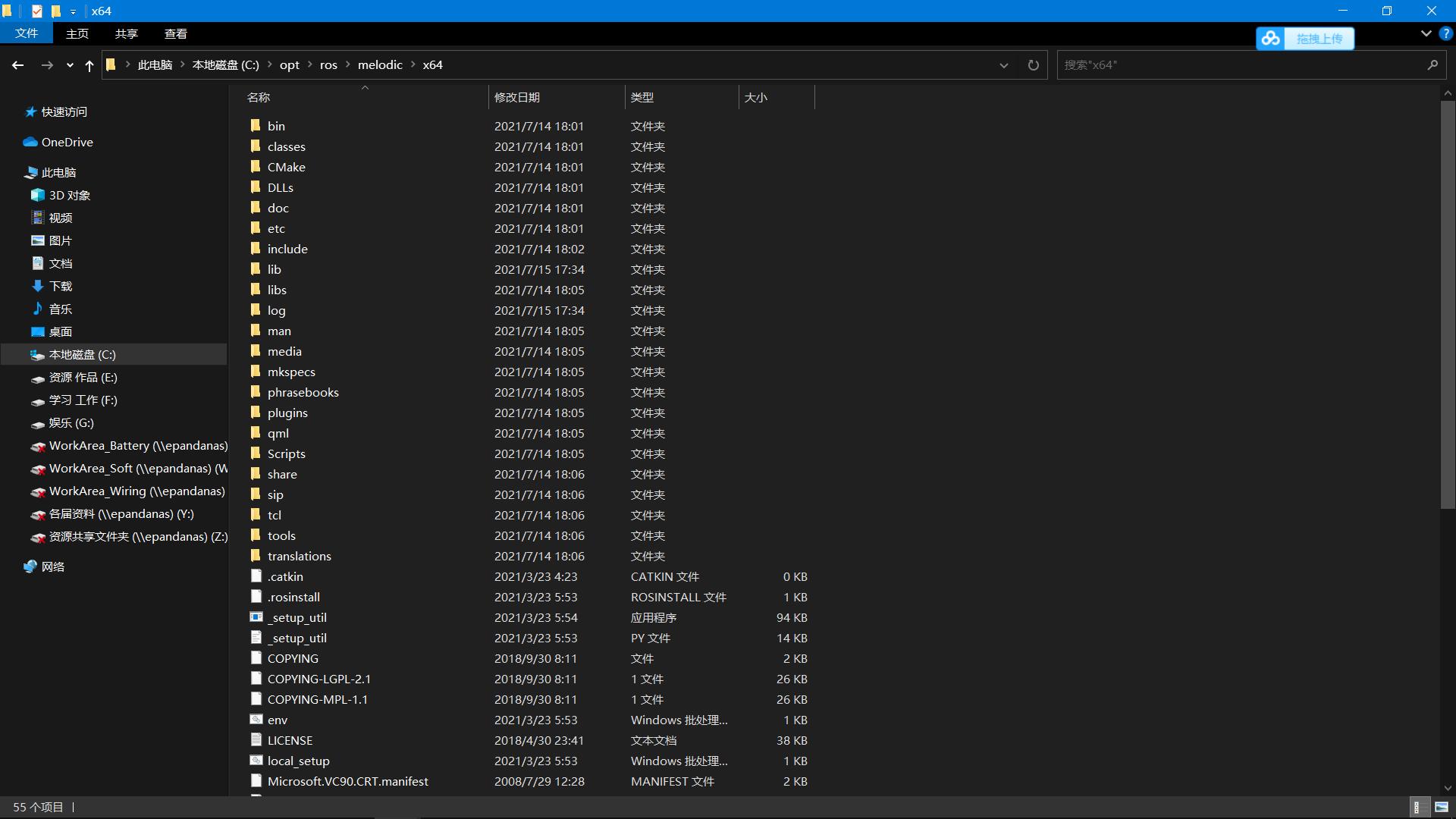 可以看到ROS已经包含了其所需要的环境。其中最重要的是setup.bat 通过vs2017命令行界面运行setup.bat 命令行选择“x64本地工具命令提示符“
可以看到ROS已经包含了其所需要的环境。其中最重要的是setup.bat 通过vs2017命令行界面运行setup.bat 命令行选择“x64本地工具命令提示符“ 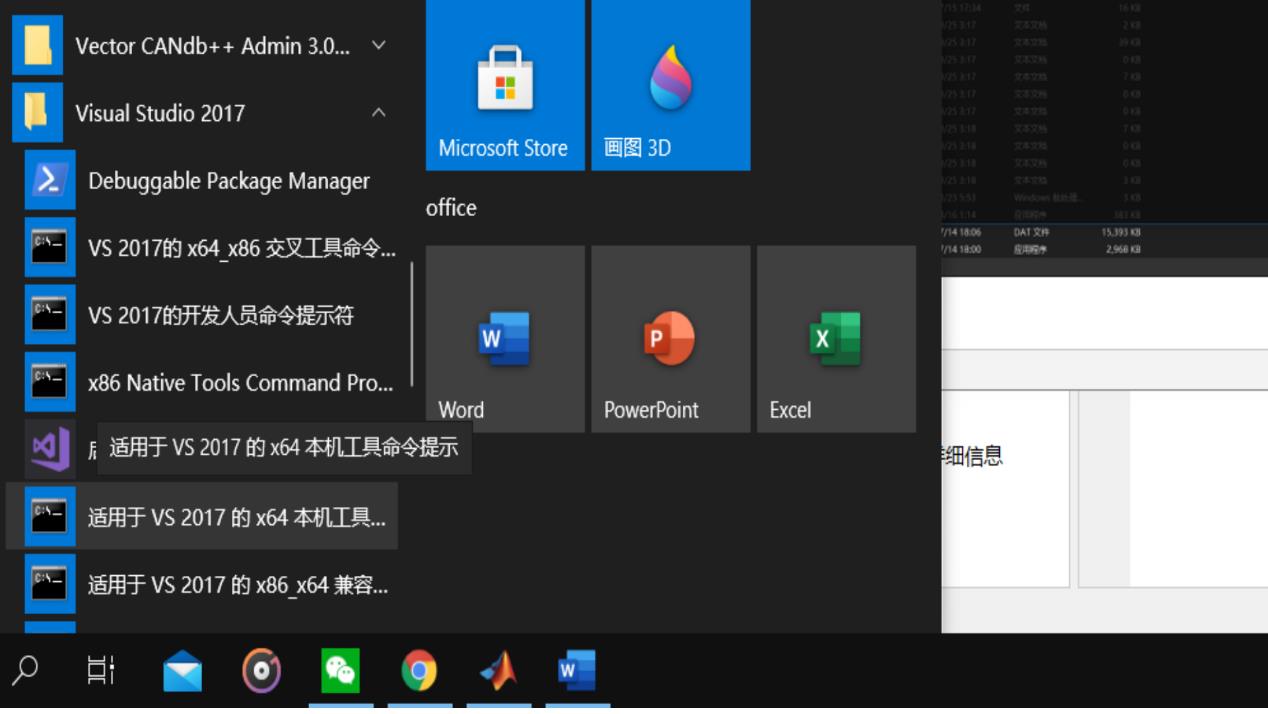
2.运行ROS 接下就能运行小海龟了。输入 roscore 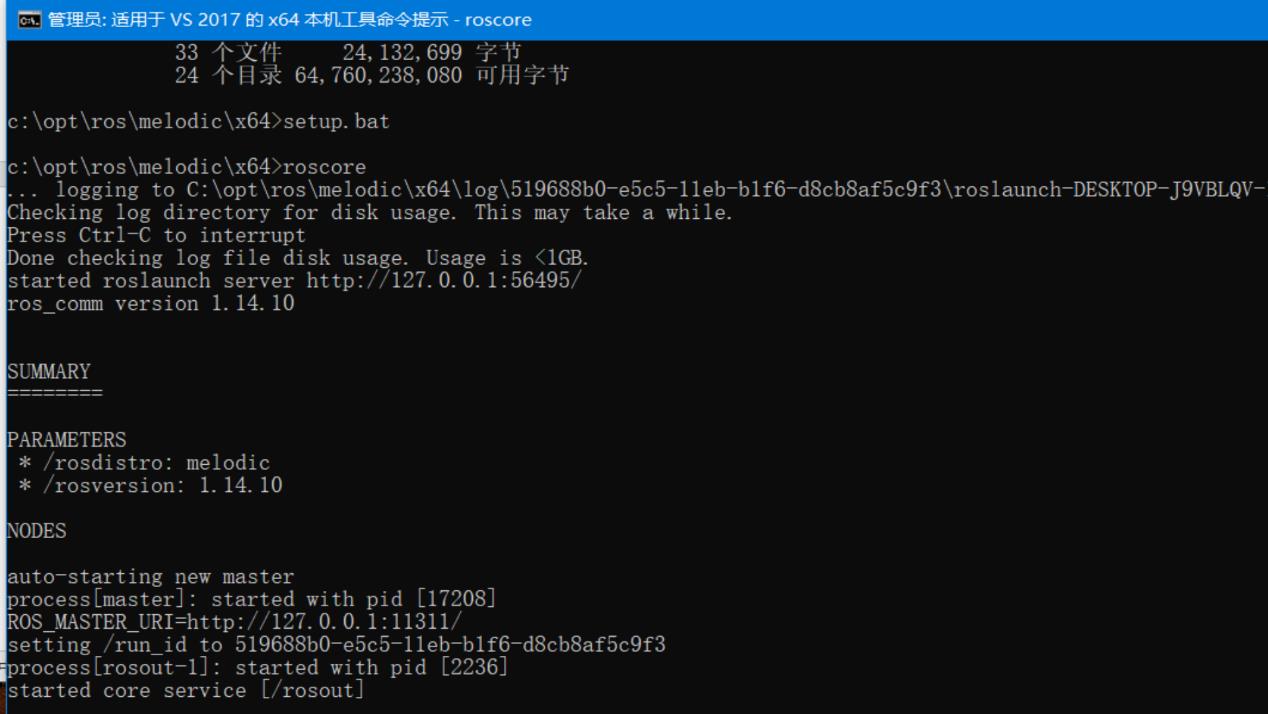 然后再按照刚才的操作打开一个命令行输入 rosrun turtlesim turtlesim_node 就能够见到小海龟
然后再按照刚才的操作打开一个命令行输入 rosrun turtlesim turtlesim_node 就能够见到小海龟 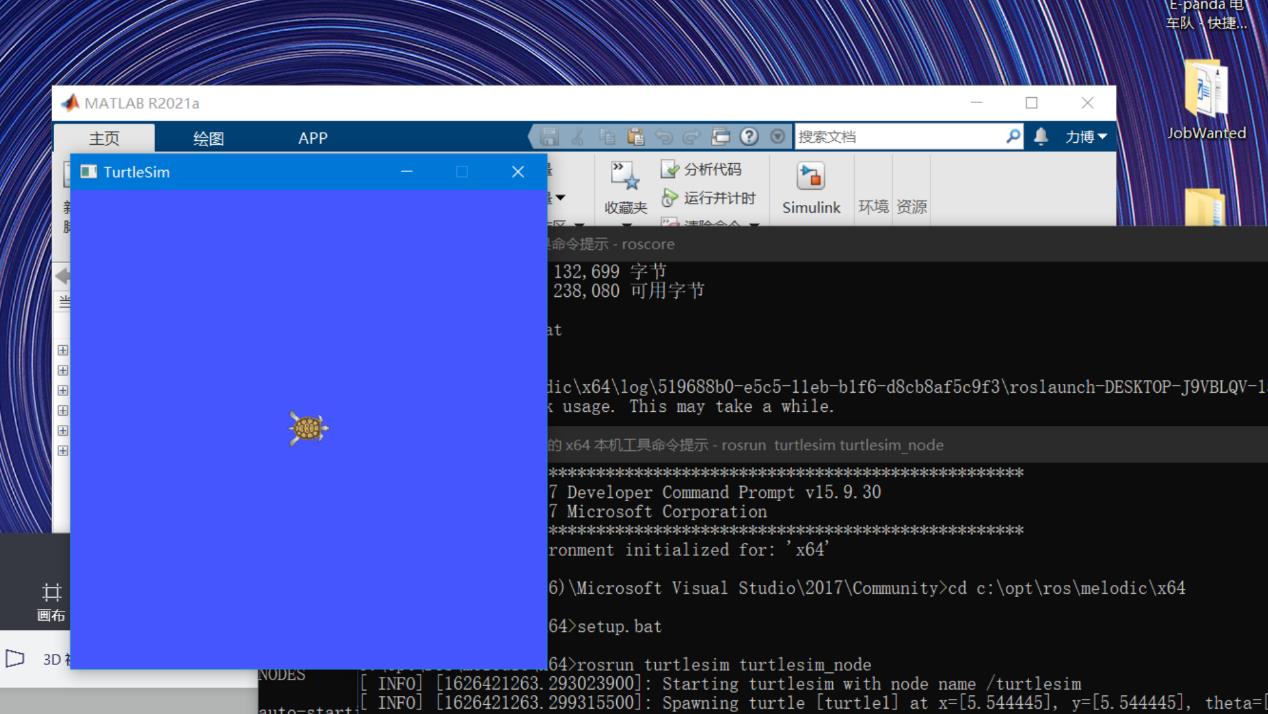 输入rosrun turtlesim turtle_teleop_key 就可以在这个窗口下控制小海龟了。
输入rosrun turtlesim turtle_teleop_key 就可以在这个窗口下控制小海龟了。 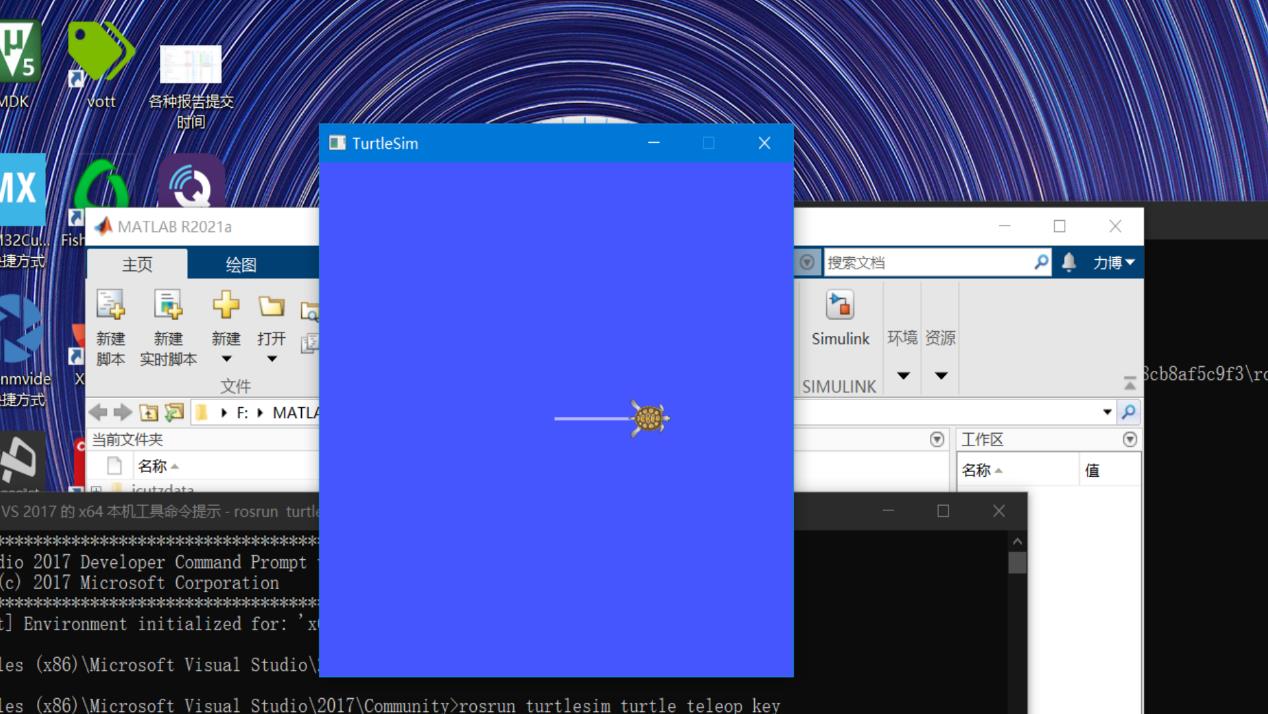
3.MATLAB连接ROS 打开matlab 要安装ROS工具包 输入rosinit 命令行中出现了创建话题成功就可以了,注意rosinit之前要在vs2017的命令行中运行roscore 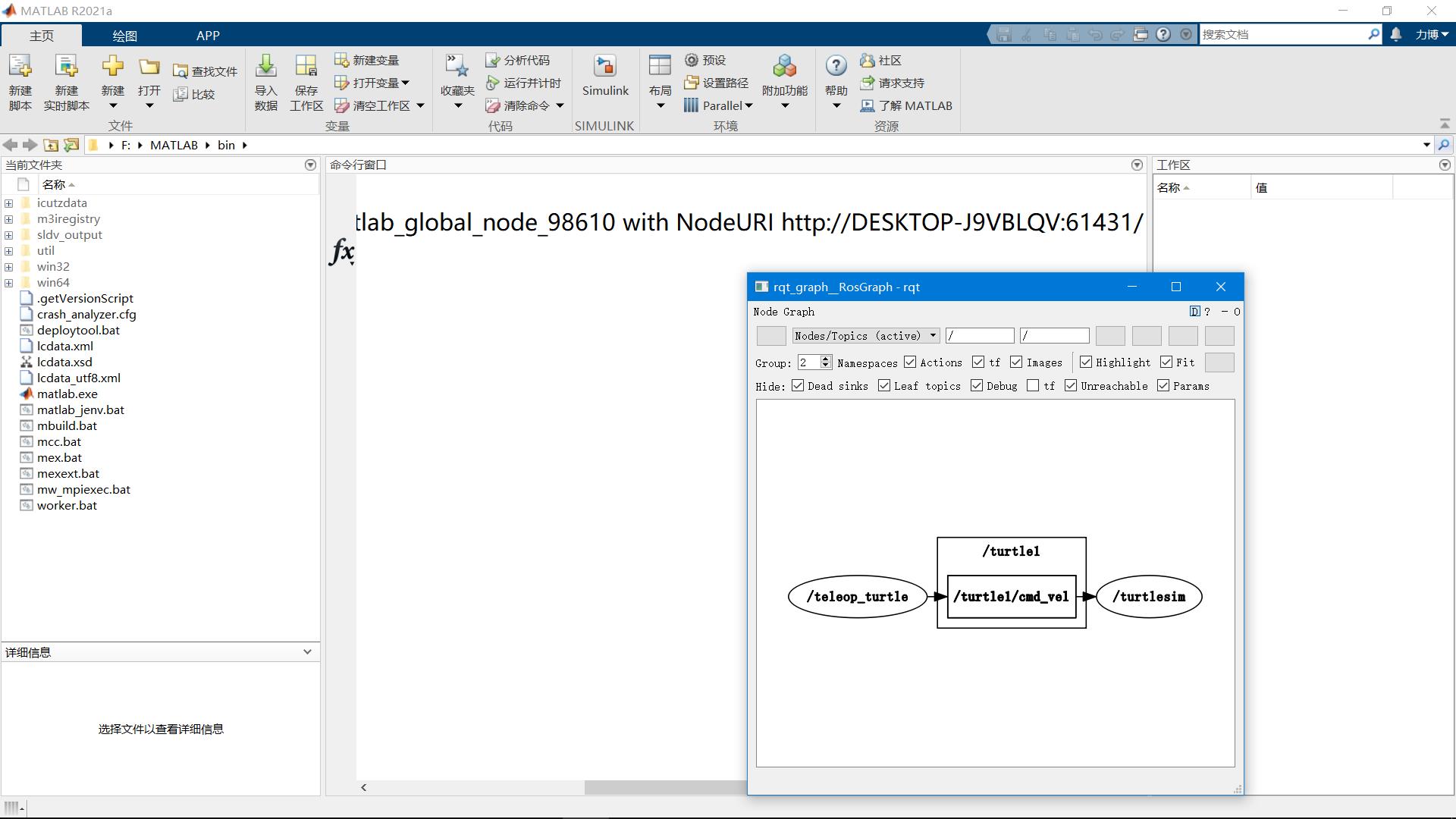 老规矩打开vs2017的命令行输入rqt_graph 就能看到matlab的话题。 接下来创建一个simulink模型。我的matlab版本是2021a。 从空模型创建就可以了。然后搭建一个这样模型按照名字搜索模块就可以了。
老规矩打开vs2017的命令行输入rqt_graph 就能看到matlab的话题。 接下来创建一个simulink模型。我的matlab版本是2021a。 从空模型创建就可以了。然后搭建一个这样模型按照名字搜索模块就可以了。 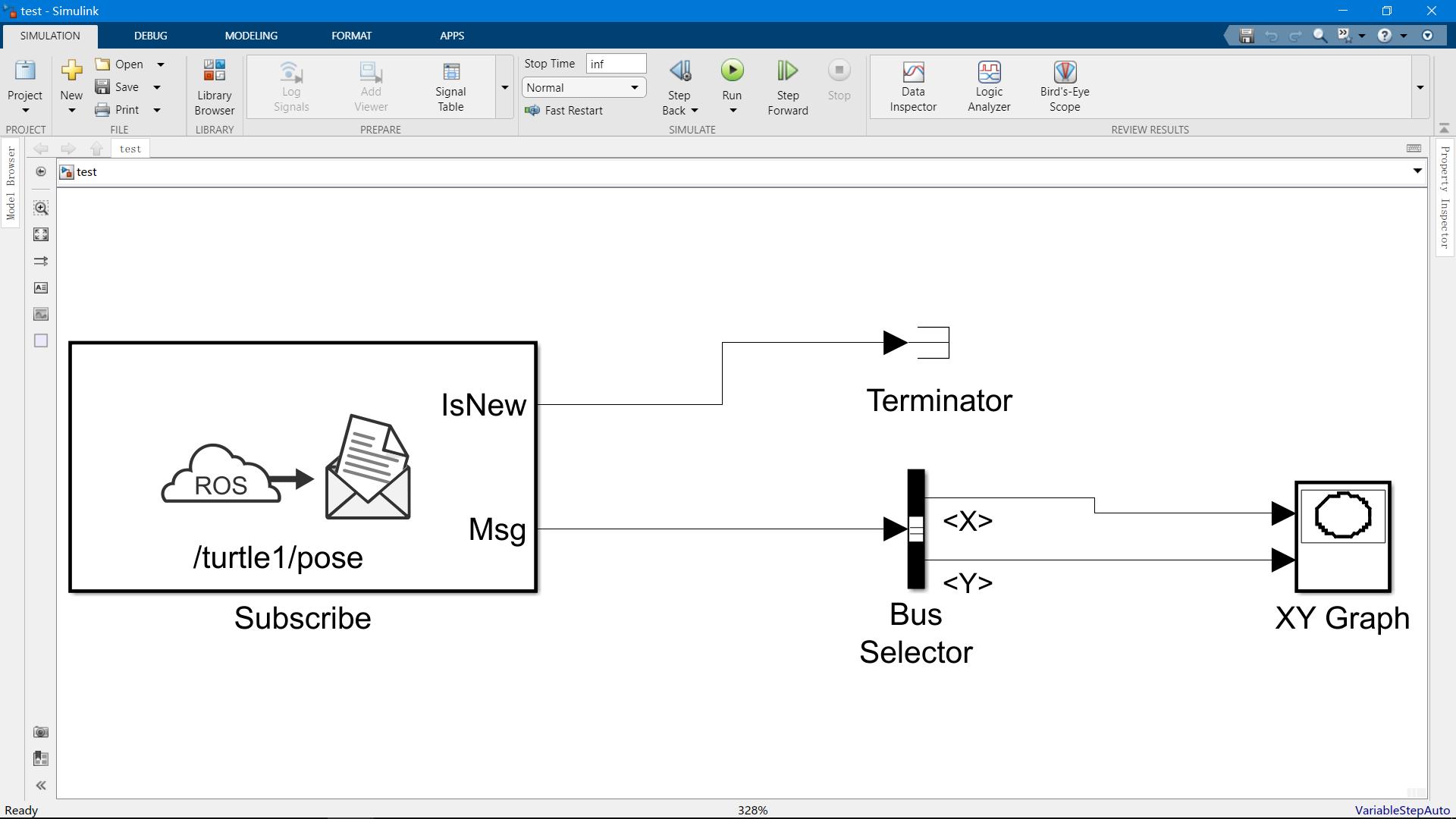
4.MATLAB连接ROS 点击“Subscribe”模块打开设置,选择“Topic”为”/turtle1/pose” 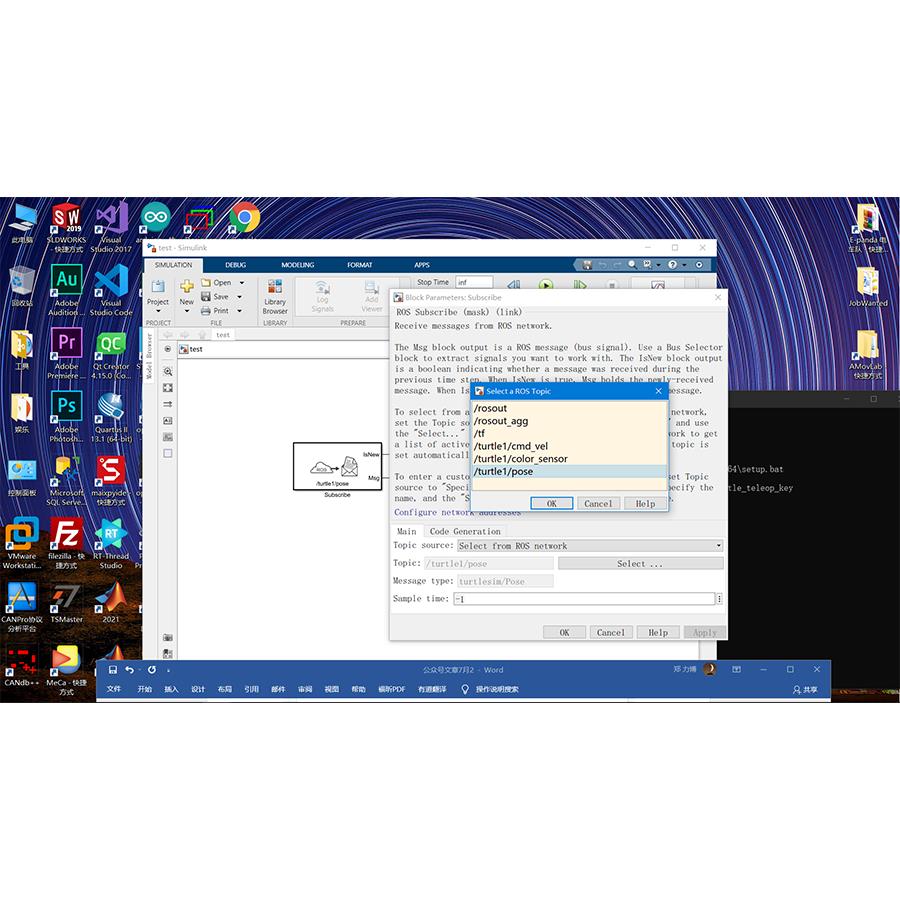 接下来点击“Bus select”中的X,Y ;并且将仿真时间设置为inf
接下来点击“Bus select”中的X,Y ;并且将仿真时间设置为inf 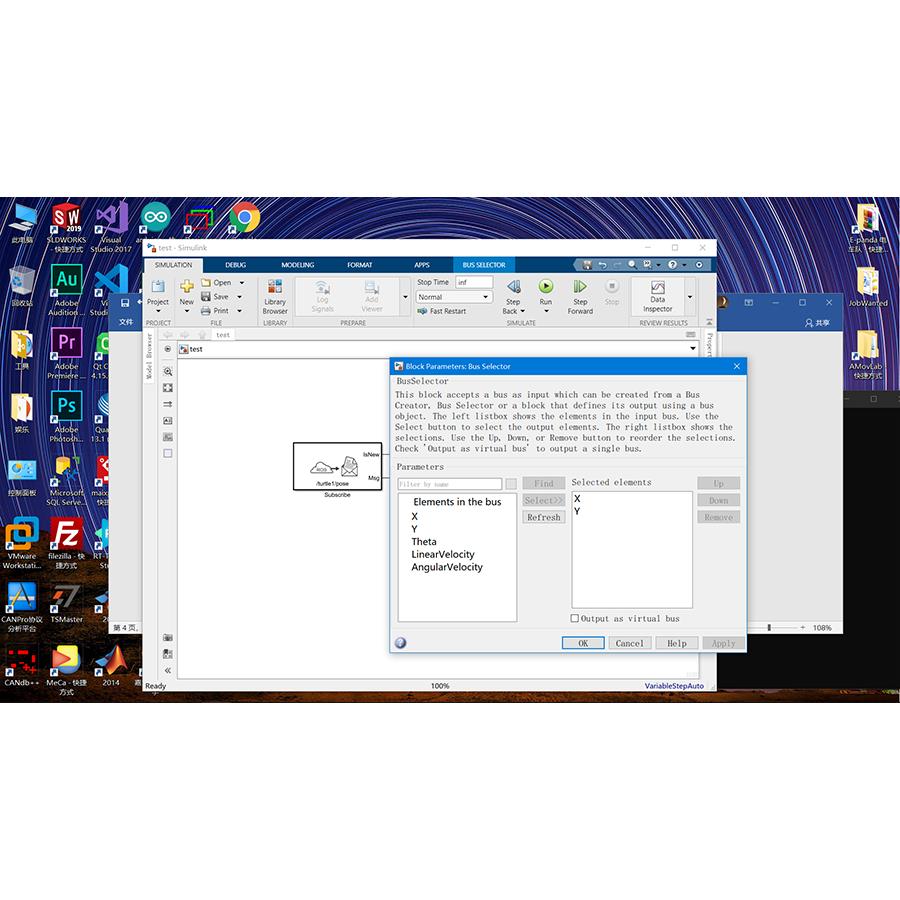 接下来运行模型就可以了。
接下来运行模型就可以了。 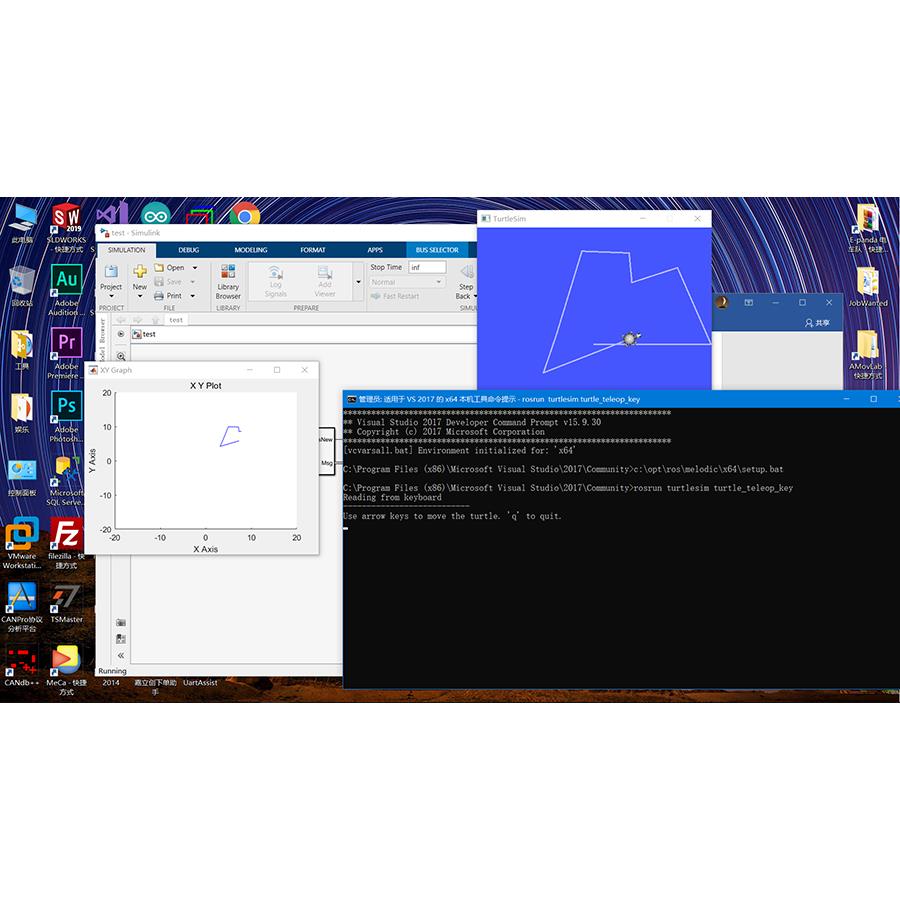 现在完成了ROS与MATLAB的联合仿真,得益于ROS的通讯是依赖于TCP/IP协议的,所以比较方便。接下来可以用MATLAB来设计ROS的控制算法,敬请期待。
现在完成了ROS与MATLAB的联合仿真,得益于ROS的通讯是依赖于TCP/IP协议的,所以比较方便。接下来可以用MATLAB来设计ROS的控制算法,敬请期待。
-
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于技术分享 | Windows下ROS如何与Matlab的联合仿真的主要内容,如果未能解决你的问题,请参考以下文章