技术分享 | 详解ROS 2的安装步骤
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了技术分享 | 详解ROS 2的安装步骤相关的知识,希望对你有一定的参考价值。
在上一期呢,我们把ROS 1 与ROS 2做了对比,承优淘劣的ROS 2系统在应用和性能上只会比ROS 1更加强大,因此ROS的全面迭代也是不可避免的。
本期就尝试一下安装ROS2吧。
1. ROS2安装
1)安装环境 本文基于Ubuntu20.04.3安装ROS2 Foxy
2)安装方式 ROS提供两种方式安装,一是二进制安装,(二进制又分为 Debian packages 和 "fat" archive两种方式),二是源码安装。这里采用二进制方式安装(Debian packages)
3)设置软件源 sudo apt update && sudo apt install curl gnupg2 lsb-release sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg 然后添加至系统软件源列表 echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
4)安装ROS2 sudo apt update sudo apt install ros-foxy-desktop 推荐安装desktop,当然也可以选择安装base版本
5)环境设置 安装完成后 echo “source /opt/ros/foxy/setup.bash” >> ~/.bashrc
2. ROS2测试 打开终端,输入 ros2 run demo_nodes_cpp talker 新开一个终端,输入 ros2 run demo_nodes_cpp listener 验证结果 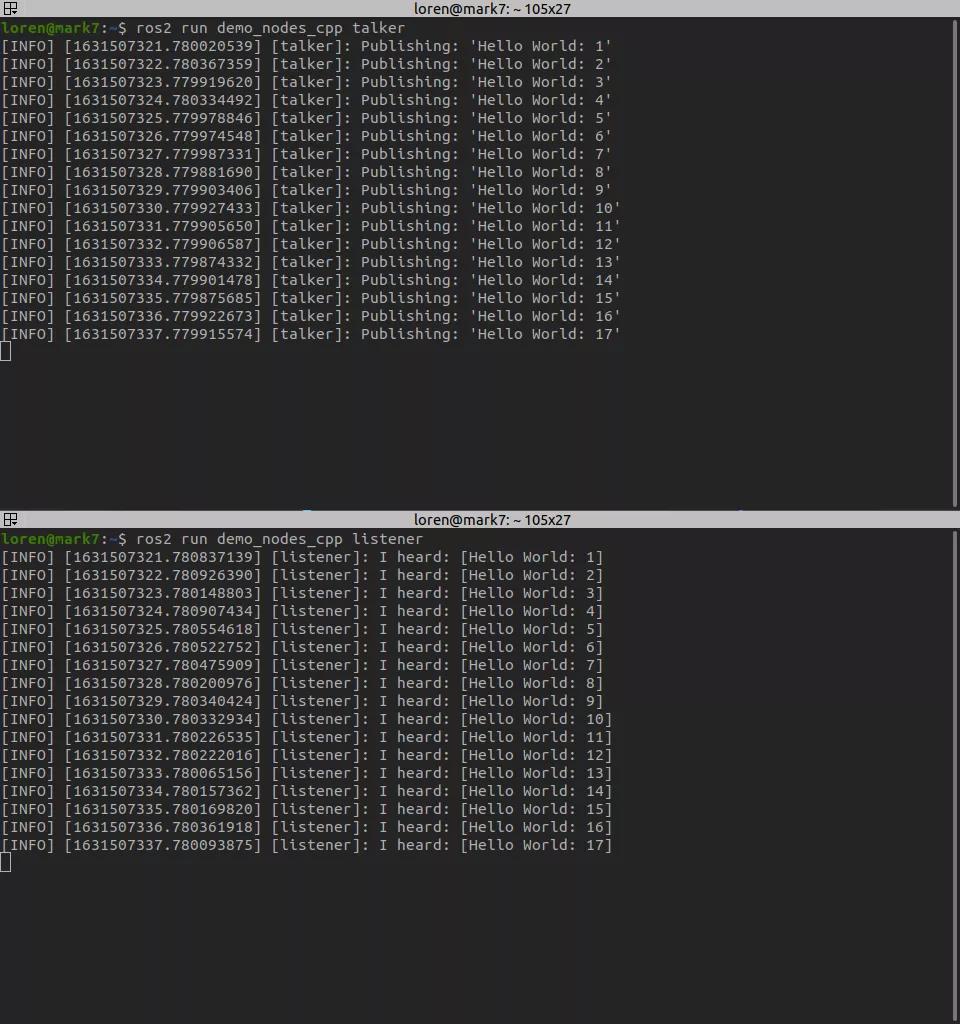 当然也可以选择最经典的小乌龟来进行测试 打开终端,输入 ros2 run turtlesim turtlesim_node 新开终端,输入 ros2 run turtlesim turtle_teleop_key 验证结果
当然也可以选择最经典的小乌龟来进行测试 打开终端,输入 ros2 run turtlesim turtlesim_node 新开终端,输入 ros2 run turtlesim turtle_teleop_key 验证结果 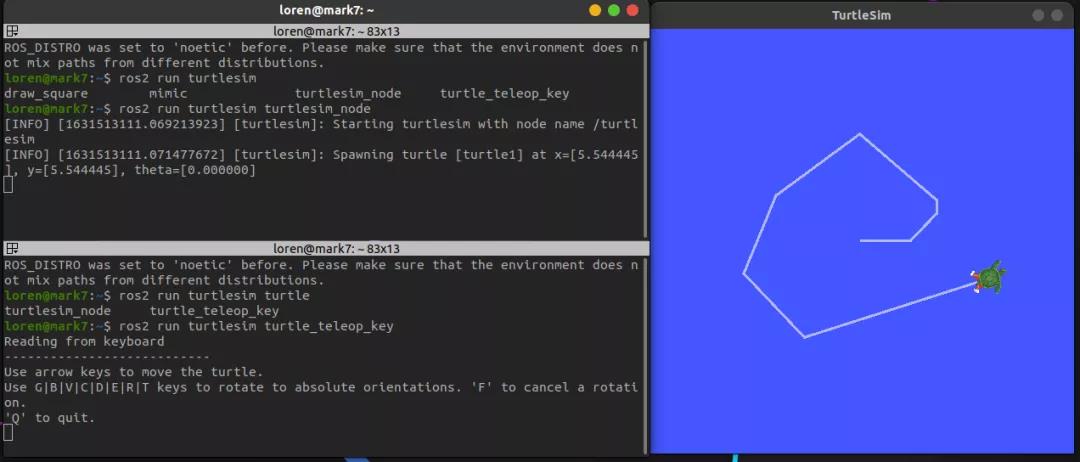
3、结语 自2007年开始,ROS的出现,随着后续的发展,打破了机器人行业标准,建立了一套全新的机器人通信标准,解决了机器人各个部分的通信问题。随着时代的发展,ROS1也暴露出诸多不足。因此ROS2的出现是必然的。ROS2继承了ROS1的优秀之处,同时解决了ROS1遗留的诸多难题。ROS2的诞生至今已经6年,未来可期!
作者:阿木工程师-青石
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于技术分享 | 详解ROS 2的安装步骤的主要内容,如果未能解决你的问题,请参考以下文章