3D,点云中的2棵树
Posted J-A
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3D,点云中的2棵树相关的知识,希望对你有一定的参考价值。
通过雷达、激光扫描、立体摄像机等三维测量设备获取的点云数据,具有数据量大、分布不均匀等特点。作为三维领域中一个重要的数据来源,点云数据主要是表征目标表面的海量点集合,并不具备传统网格数据的集合拓扑信息。所以点云数据处理中最为核心的问题就是建立离散点间的拓扑关系,实现基于邻域关系的快速查找。
建立空间索引在点云数据处理中已被广泛应用,常见空间索引一般是自顶向下逐级划分空间的各种空间索引结构,比较有代表性的包括 BSP树、 KD树、 KDB树、 R树、 R+树、 CELL树、四叉树和八叉树等索引结构,而在这些结构中KD树和八叉树在3D点云数据组织中应用较为广泛。
一、点云之kd-tree
给定一堆已有的样本数据,和一个被询问的数据点(红色五角星),我们***如何找到离五角星最近的15个点***?
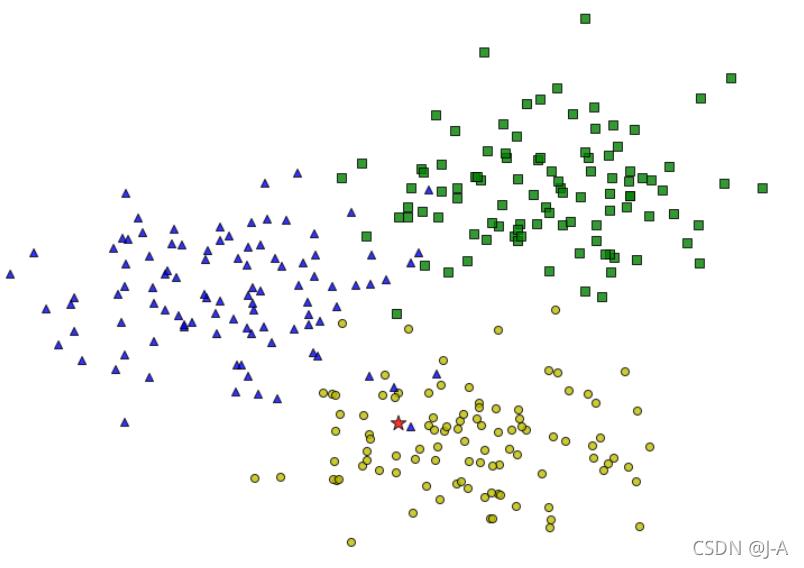
正常思路往往是:在五角星附近的一些点中,分别计算每一个点的距离,然后挑出其中最近的15个点。
如下图所示,只对紫圈里的点进行计算。
以上是关于3D,点云中的2棵树的主要内容,如果未能解决你的问题,请参考以下文章