点云数据集❤️27个点云数据下载网站❤️
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云数据集❤️27个点云数据下载网站❤️相关的知识,希望对你有一定的参考价值。
文章目录
- 1 KITTI
- 2 ModelNet
- 3 ShapeNet
- 4 Oxford Robotcar
- 5 PartNet
- 6 S3DIS
- 7 ScanNet
- 8 Stanford 3D
- 9 Princeton Shape Benchmark
- 10 SYDNEY URBAN OBJECTS DATASET
- 11 ASL Datasets Repository(ETH)
- 12 Large-Scale Point Cloud Classification Benchmark(ETH)
- 13 Robotic 3D Scan Repository
- 14 IQmulus & TerraMobilita Contest
- 15 Oakland 3-D Point Cloud Dataset
- 16 Robotic 3D Scan Repository
- 17 Ford Campus Vision and Lidar Data Set
- 18 The Stanford Track Collection
- 19 PASCAL3D+
- 20 3D MNIST
- 21 nuScenes
- 22 PreSIL
- 23 3D Match
- 24 BLVD
- 25 Matterport3D
- 26 SemanticKITTI
- 27 NPM3D
1 KITTI
The KITTI Vision Benchmark Suite.

2 ModelNet
The Princeton ModelNet.
3 ShapeNet
A collaborative dataset between researchers at Princeton, Stanford and TTIC.

4 Oxford Robotcar
The dataset captures many different combinations of weather, traffic and pedestrians.

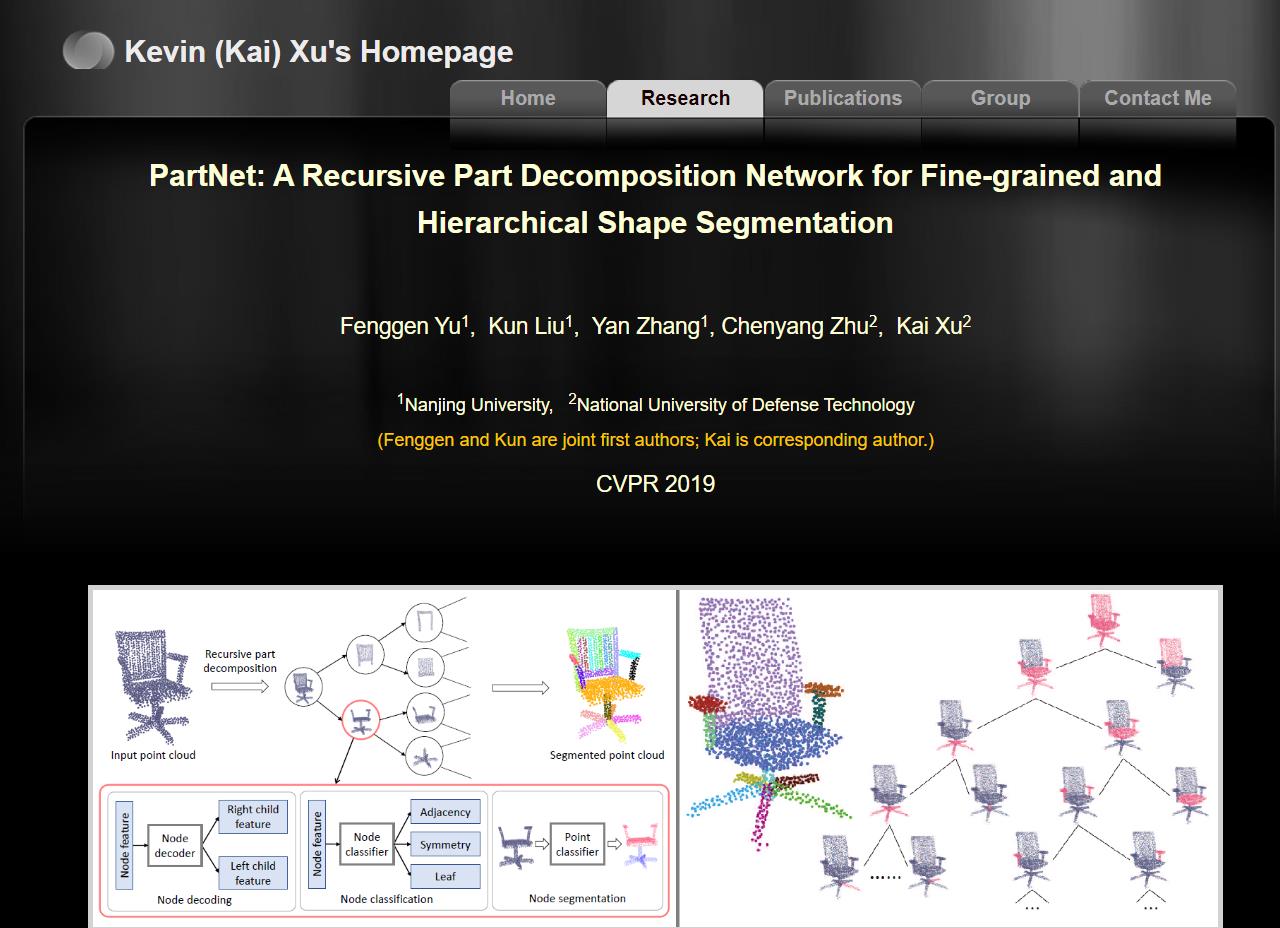
5 PartNet
PartNet benchmark from Nanjing University and National University of Defense Technology.
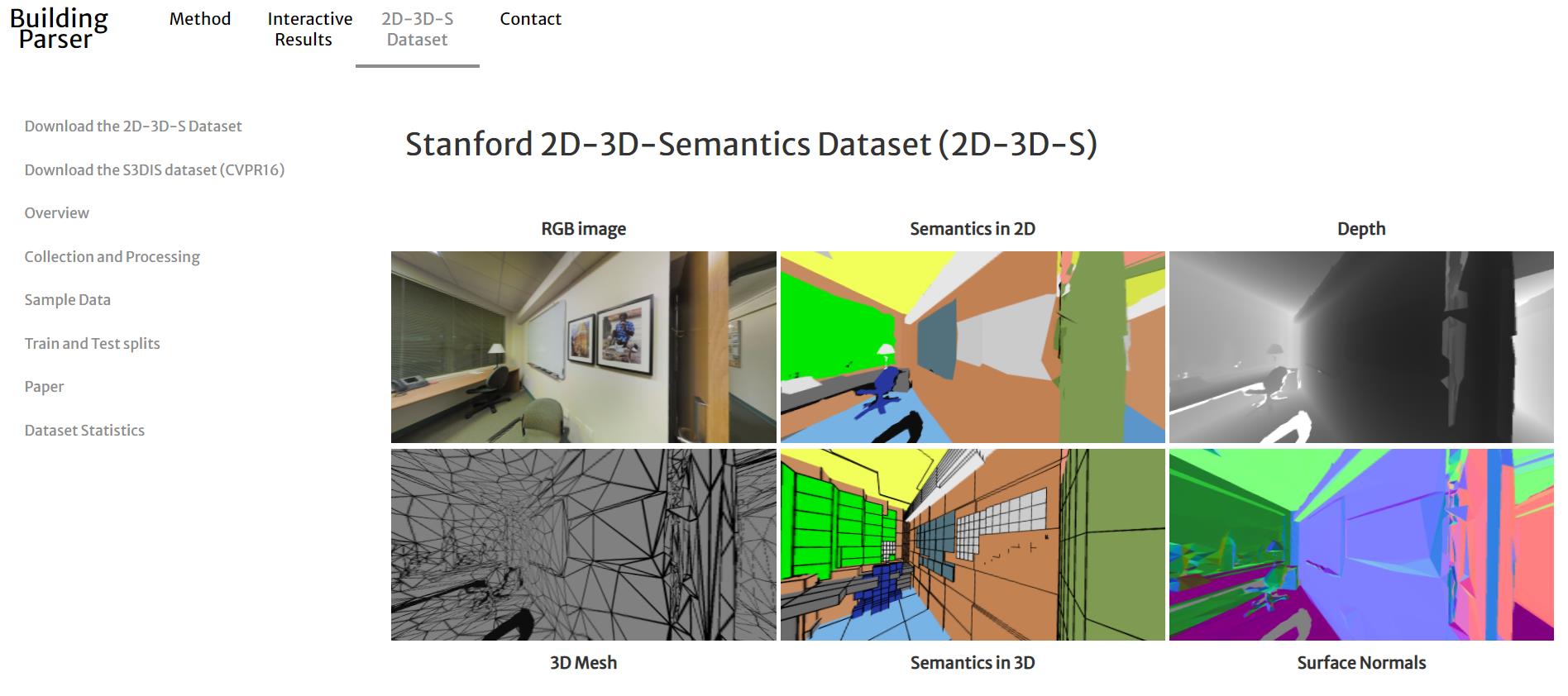
6 S3DIS
The Stanford Large-Scale 3D Indoor Spaces Dataset.
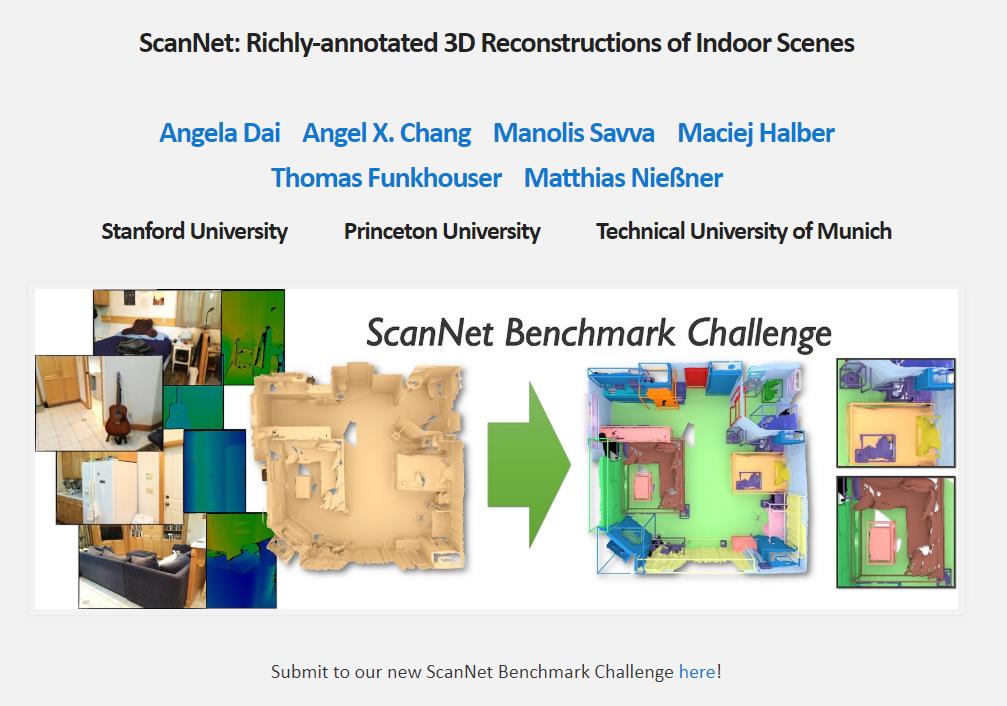
7 ScanNet
Richly-annotated 3D Reconstructions of Indoor Scenes.
8 Stanford 3D
The Stanford 3D Scanning Repository.
9 Princeton Shape Benchmark
The Princeton Shape Benchmar
点击这里
10 SYDNEY URBAN OBJECTS DATASET
This dataset contains a variety of common urban road objects scanned with a Velodyne HDL-64E LIDAR, collected in the CBD of Sydney, Australia. There are 631 individual scans of objects across classes of vehicles, pedestrians, signs and trees.
点击这里
11 ASL Datasets Repository(ETH)
This site is dedicated to provide datasets for the Robotics community with the aim to facilitate result evaluations and comparisons.

12 Large-Scale Point Cloud Classification Benchmark(ETH)
(http://www.semantic3d.net/) This benchmark closes the gap and provides a large labelled 3D point cloud data set of natural scenes with over 4 billion points in total.
[点击这里]

13 Robotic 3D Scan Repository
The Canadian Planetary Emulation Terrain 3D Mapping Dataset is a collection of three-dimensional laser scans gathered at two unique planetary analogue rover test facilities in Canada.

14 IQmulus & TerraMobilita Contest
The database contains 3D MLS data from a dense urban environment in Paris (France), composed of 300 million points. The acquisition was made in January 2013.
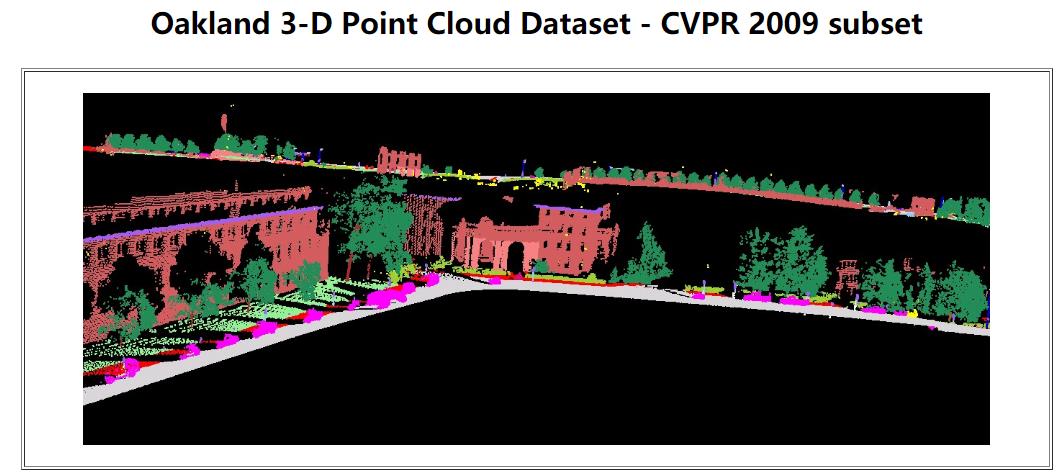
15 Oakland 3-D Point Cloud Dataset
This repository contains labeled 3-D point cloud laser data collected from a moving platform in a urban environment.
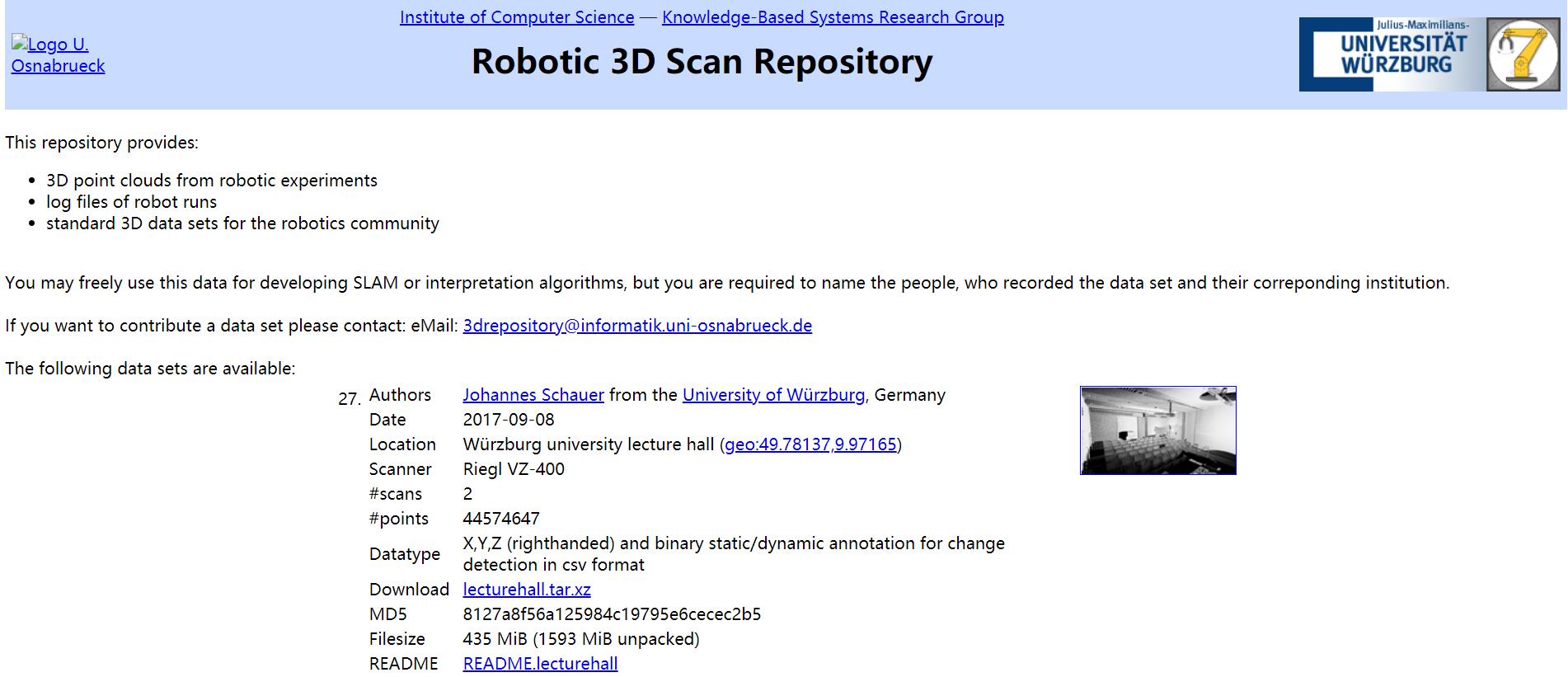
16 Robotic 3D Scan Repository
This repository provides 3D point clouds from robotic experiments,log files of robot runs and standard 3D data sets for the robotics community.
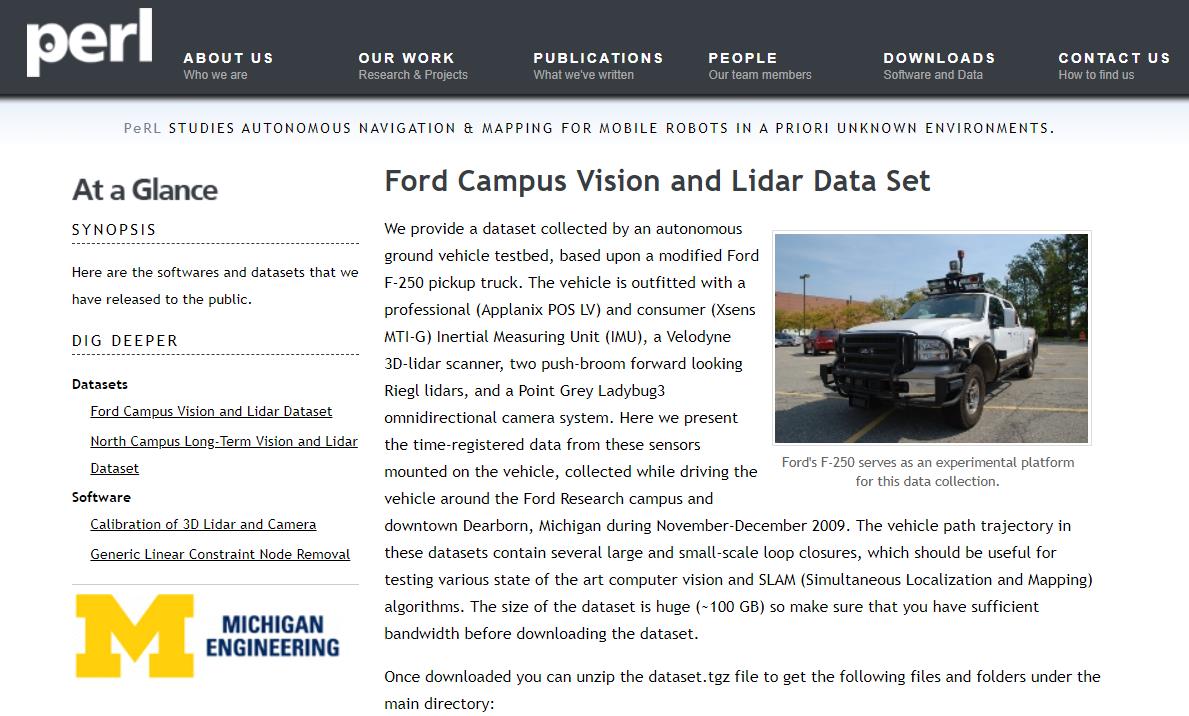
17 Ford Campus Vision and Lidar Data Set
The dataset is collected by an autonomous ground vehicle testbed, based upon a modified Ford F-250 pickup truck.
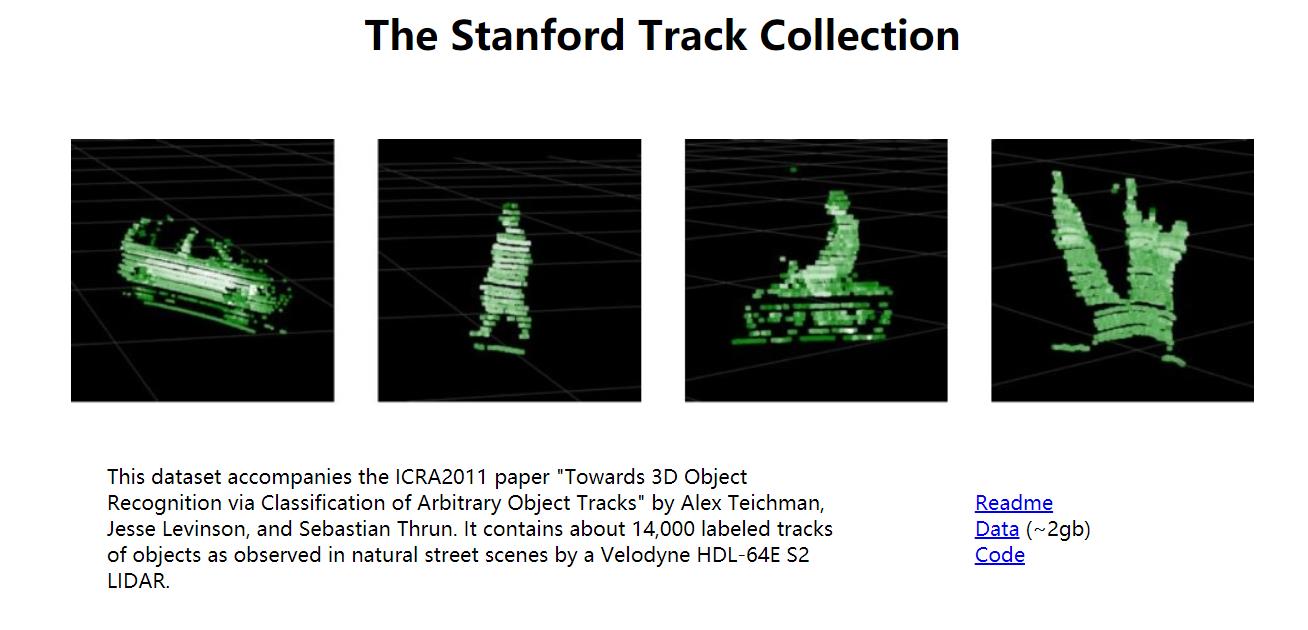
18 The Stanford Track Collection
This dataset contains about 14,000 labeled tracks of objects as observed in natural street scenes by a Velodyne HDL-64E S2 LIDAR.
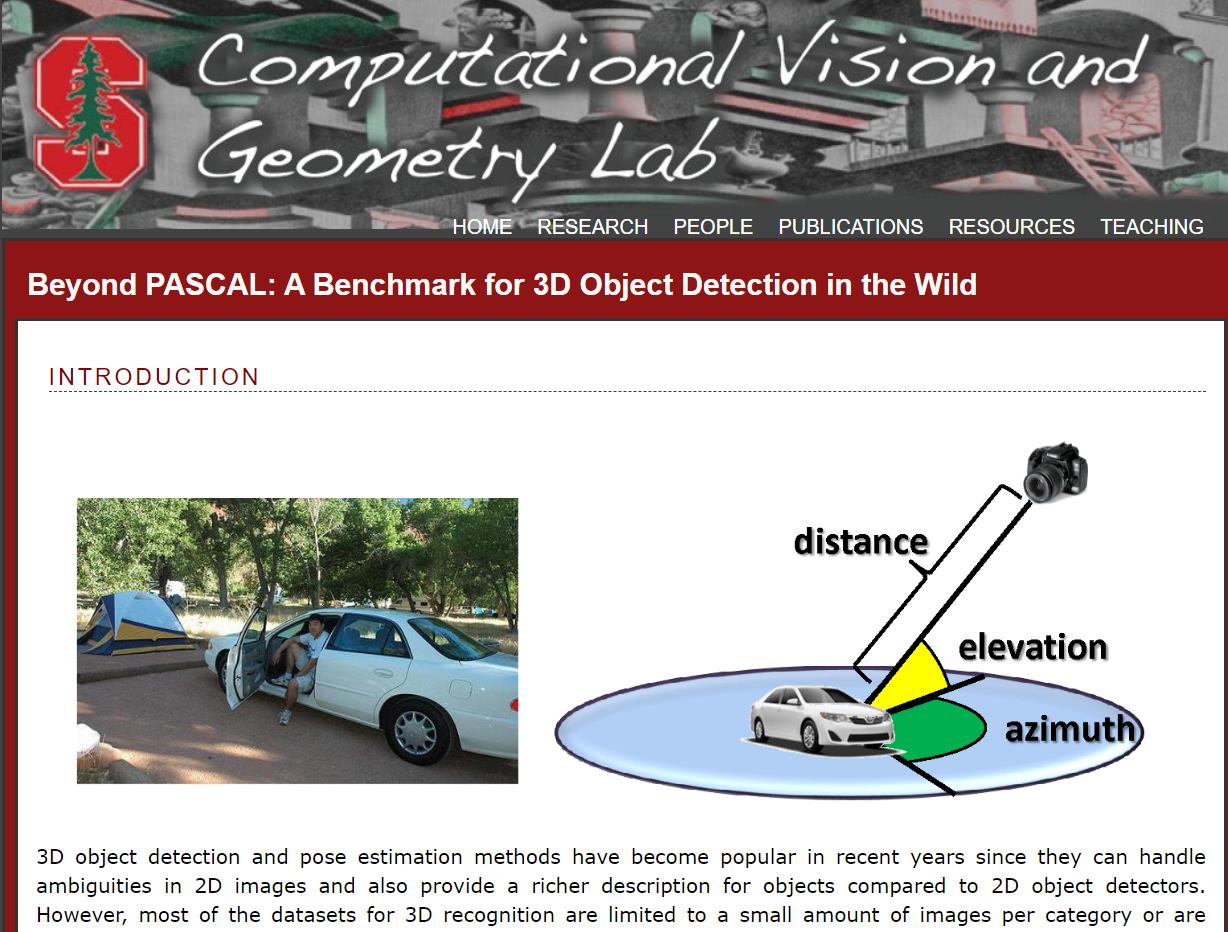
19 PASCAL3D+
Beyond PASCAL: A Benchmark for 3D Object Detection in the Wild.
点击这里
20 3D MNIST
The aim of this dataset is to provide a simple way to get started with 3D computer vision problems such as 3D shape recognition.
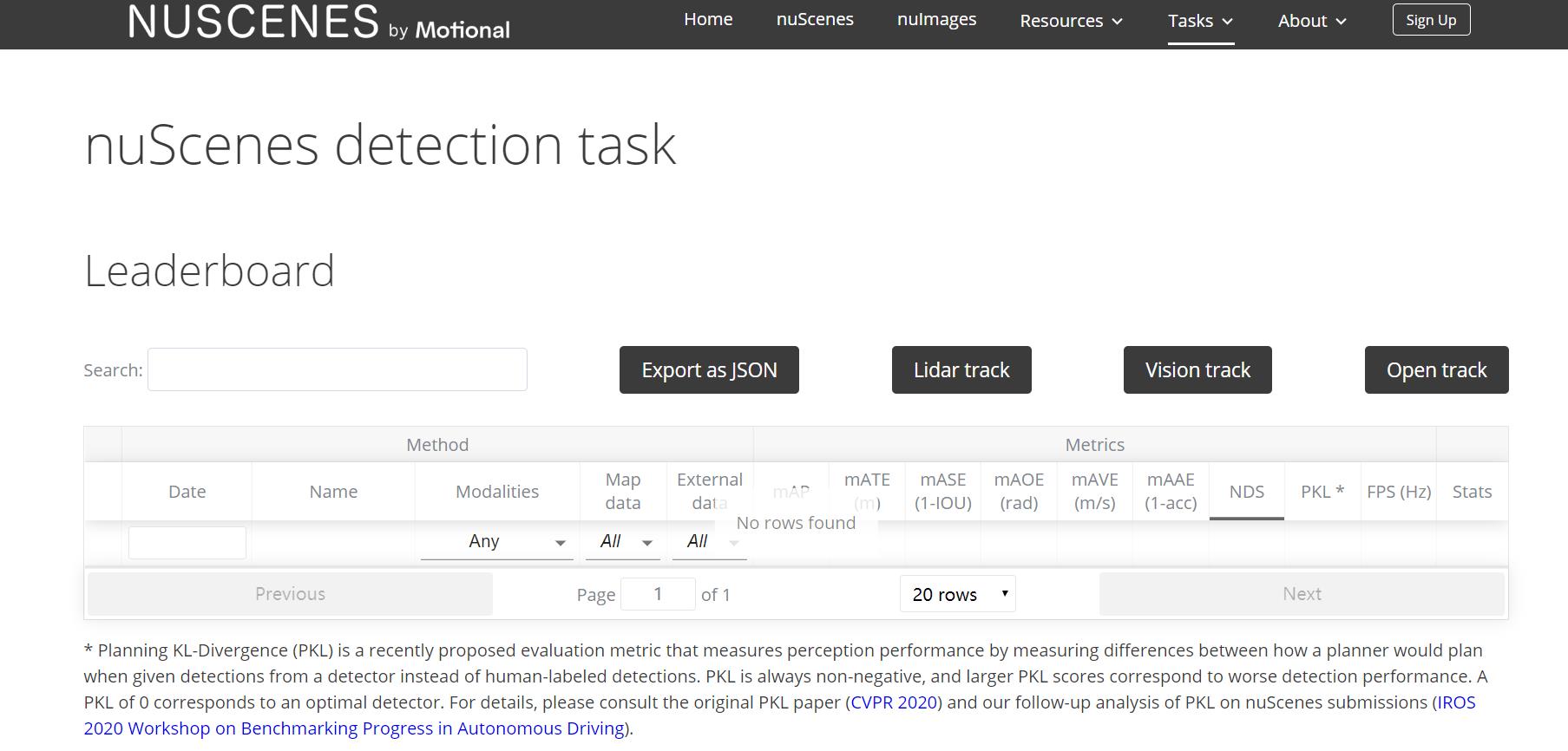
21 nuScenes
The nuScenes dataset is a large-scale autonomous driving dataset.
22 PreSIL
Depth information, semantic segmentation (images), point-wise segmentation (point clouds), ground point labels (point clouds), and detailed annotations for all vehicles and people. [paper]
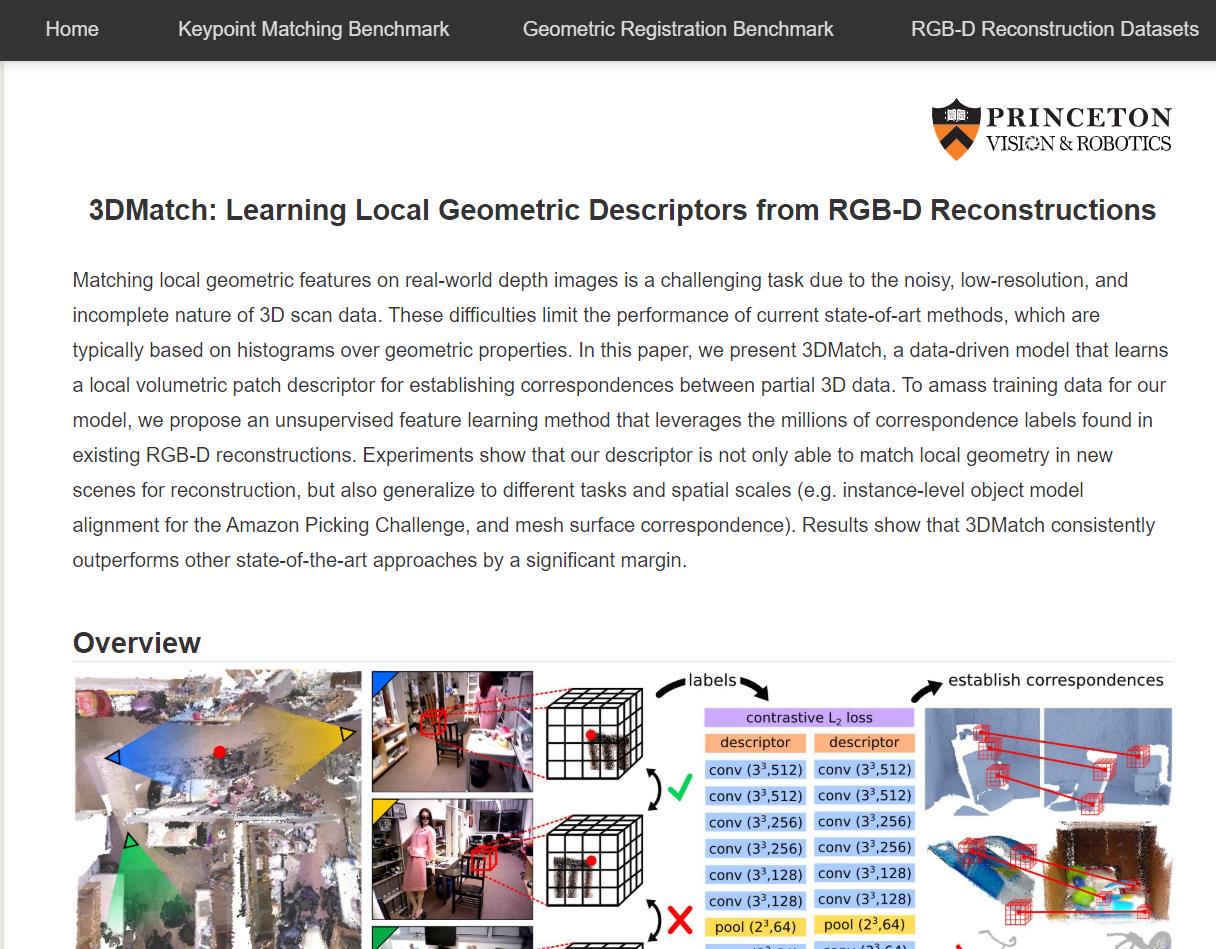
23 3D Match
Keypoint Matching Benchmark, Geometric Registration Benchmark, RGB-D Reconstruction Datasets.
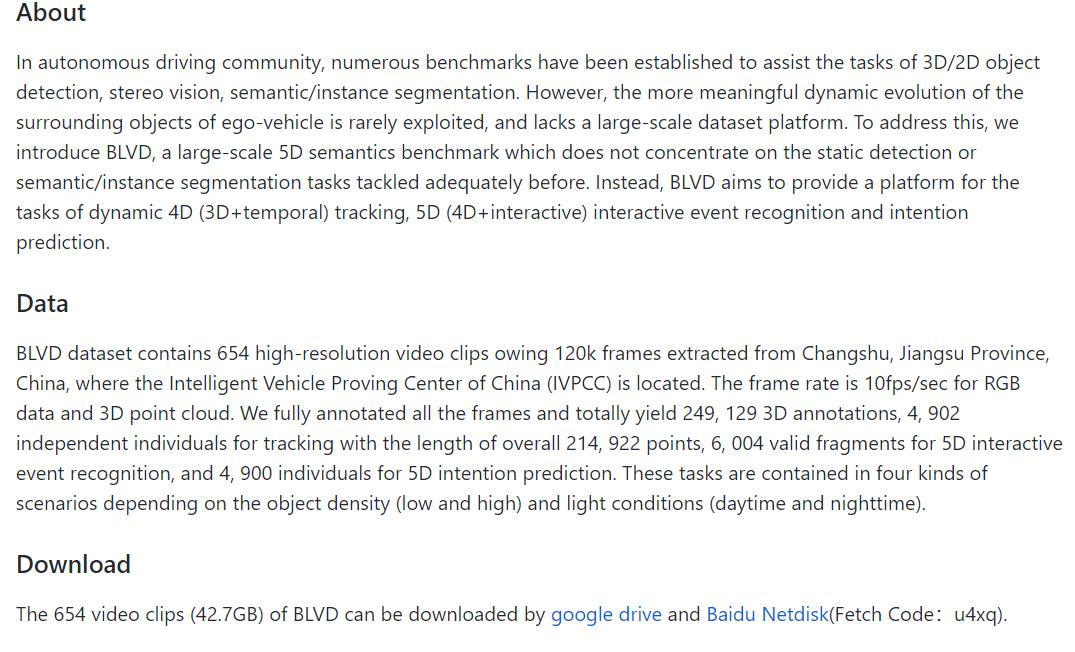
24 BLVD
(a) 3D detection, (b) 4D tracking, © 5D interactive event recognition and (d) 5D intention prediction. [ICRA 2019 paper]
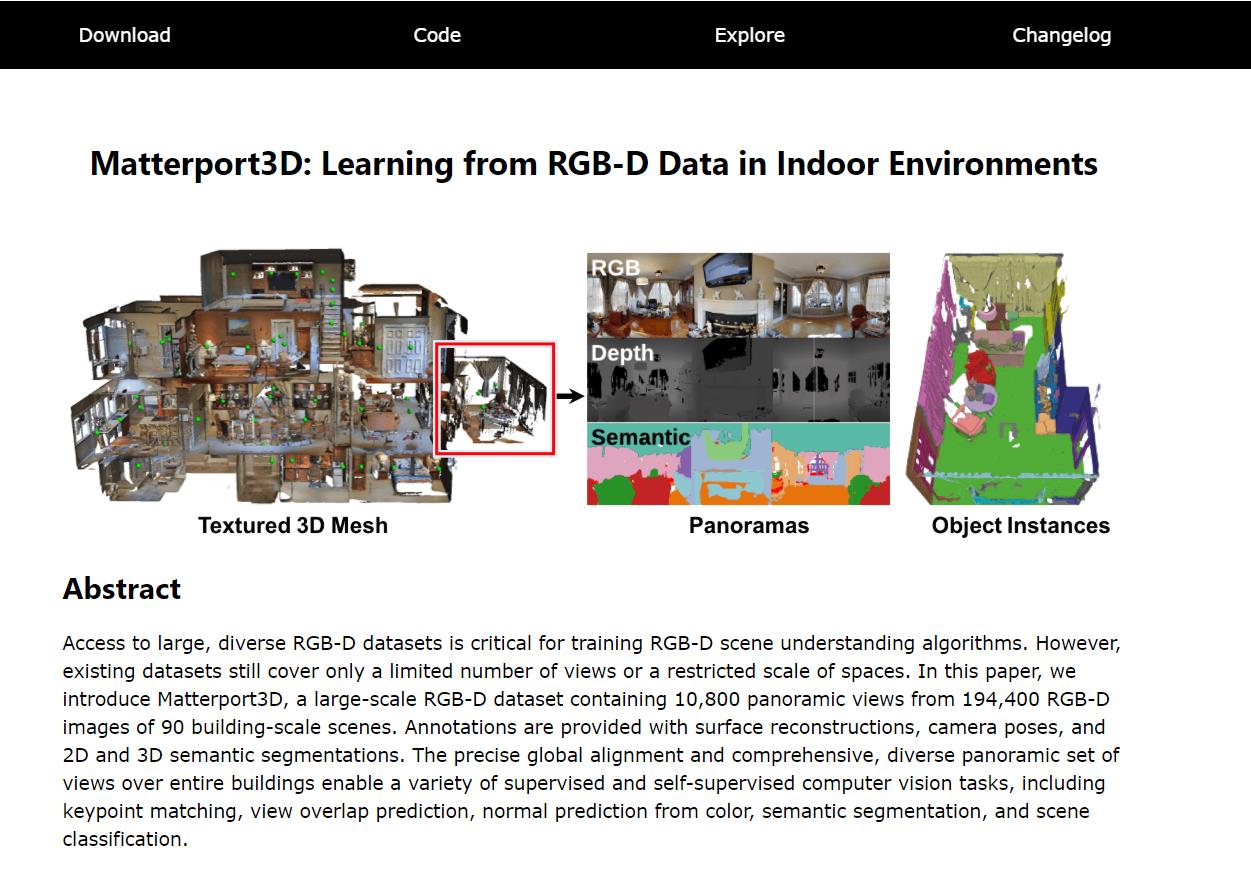
25 Matterport3D
RGB-D: 10,800 panoramic views from 194,400 RGB-D images. Annotations: surface reconstructions, camera poses, and 2D and 3D semantic segmentations. Keypoint matching, view overlap prediction, normal prediction from color, semantic segmentation, and scene classification. [3DV 2017 paper] [code]
26 SemanticKITTI
Sequential Semantic Segmentation, 28 classes, for autonomous driving. All sequences of KITTI odometry labeled. [ICCV 2019 paper]

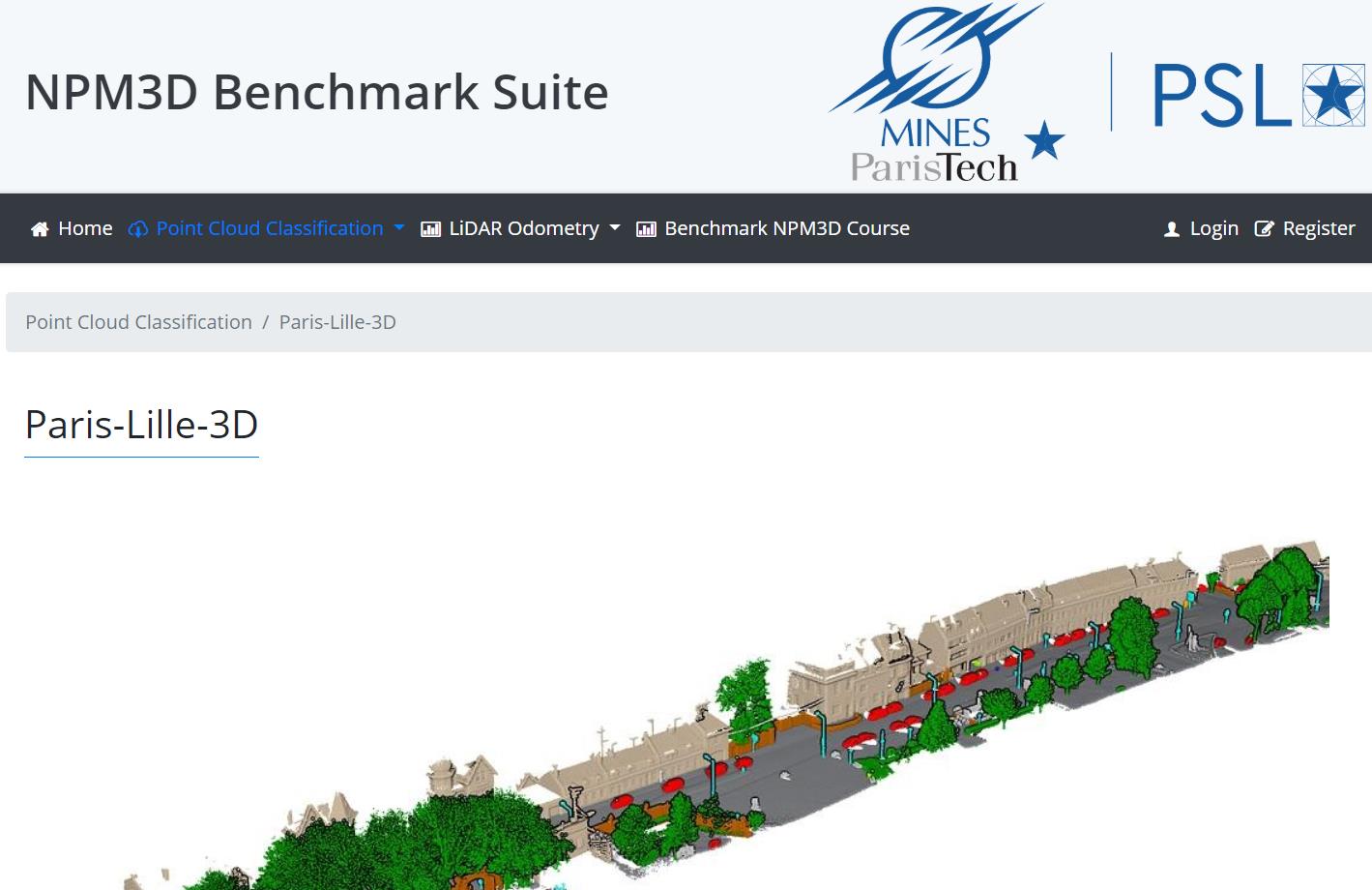
27 NPM3D
The Paris-Lille-3D has been produced by a Mobile Laser System (MLS) in two different cities in France (Paris and Lille).
以上是关于点云数据集❤️27个点云数据下载网站❤️的主要内容,如果未能解决你的问题,请参考以下文章