隧道点云处理:投影边界提取(Boundary Estimation)
Posted 没事就要敲代码
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了隧道点云处理:投影边界提取(Boundary Estimation)相关的知识,希望对你有一定的参考价值。
1 算法原理
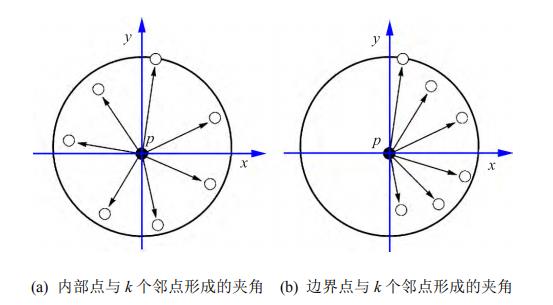
根据点云中一点与其邻域点的夹角特性,提取隧道投影点云边界:计算点云中一点 p 与其邻域点连线构成的相邻夹角,若相邻夹角的最大值大于某一阈值,则该点 p 为边界点,否则为内部点。
2 代码实现
#include <iostream>
#include <pcl\\io\\pcd_io.h>
#include <pcl\\filters\\voxel_grid.h>
以上是关于隧道点云处理:投影边界提取(Boundary Estimation)的主要内容,如果未能解决你的问题,请参考以下文章
点云处理技术之PCLrange image——提取深度图像的边界并可视化
点云处理技术之PCL滤波器——参数化模型(投影点云,pcl::ProjectInliers)