点云处理技术之PCLrange image——提取深度图像的边界并可视化
Posted 非晚非晚
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了点云处理技术之PCLrange image——提取深度图像的边界并可视化相关的知识,希望对你有一定的参考价值。
有三种不同的边界:
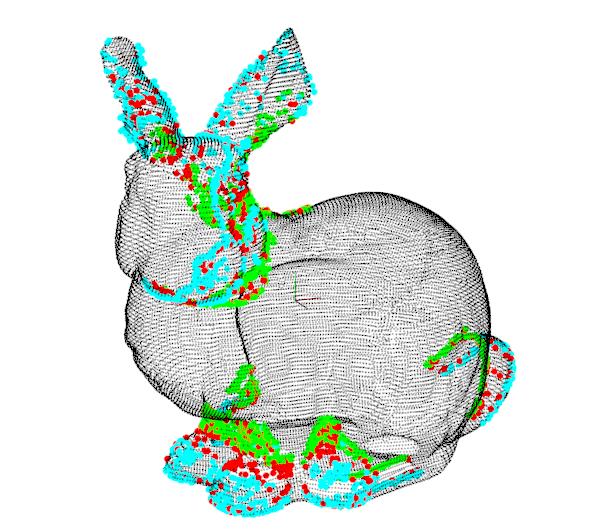
- object borders:目标最外层的边界
- veil points:障碍物边界和阴影边界之间的插值点
- shadow border:与遮挡相邻的背景点
三种边界的示意图如下:

#include <iostream>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/range_image_border_extractor.h>
#include <pcl/console/parse.h>
#include <pcl/common/file_io.h> // for getFilenameWithoutExtension
typedef pcl::PointXYZ PointType;
// --------------------
// -----Parameters-----
// --------------------
float angular_resolution = 0.5f;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
bool setUnseenToMaxRange = false;
// --------------
// -----Help-----
// --------------
void printUsage(const char *progName)
std::cout << "\\n\\nUsage: " << progName << " [options] <scene.pcd>\\n\\n"
<< "Options:\\n"
<< "-------------------------------------------\\n"
<< "-r <float> angular resolution in degrees (default " << angular_resolution << ")\\n"
<< "-c <int> coordinate frame (default " << (int)coordinate_frame << ")\\n"
<< "-m Treat all unseen points to max range\\n"
<< "-h this help\\n"
<< "\\n\\n";
// --------------
// -----Main-----
// --------------
int main(int argc, char **argv)
// --------------------------------------
// -----Parse Command Line Arguments-----
// --------------------------------------
if (pcl::console::find_argument(argc, argv, "-h") >= 0)
printUsage(argv[0]);
return 0;
if (pcl::console::find_argument(argc, argv, "-m") >= 0)
setUnseenToMaxRange = true;
std::cout << "Setting unseen values in range image to maximum range readings.\\n";
int tmp_coordinate_frame;
if (pcl::console::parse(argc, argv, "-c", tmp_coordinate_frame) >= 0)
coordinate_frame = pcl::RangeImage::CoordinateFrame(tmp_coordinate_frame);
std::cout << "Using coordinate frame " << (int)coordinate_frame << ".\\n";
if (pcl::console::parse(argc, argv, "-r", angular_resolution) >= 0)
std::cout << "Setting angular resolution to " << angular_resolution << "deg.\\n";
angular_resolution = pcl::deg2rad(angular_resolution);
// ------------------------------------------------------------------
// -----Read pcd file or create example point cloud if not given-----
// ------------------------------------------------------------------
pcl::PointCloud<PointType>::Ptr point_cloud_ptr(new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType> &point_cloud = *point_cloud_ptr;
pcl::PointCloud<pcl::PointWithViewpoint> far_ranges;
Eigen::Affine3f scene_sensor_pose(Eigen::Affine3f::Identity());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument(argc, argv, "pcd");
if (!pcd_filename_indices.empty())
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile(filename, point_cloud) == -1)
std::cout << "Was not able to open file \\"" << filename << "\\".\\n";
printUsage(argv[0]);
return 0;
scene_sensor_pose = Eigen::Affine3f(Eigen::Translation3f(point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f(point_cloud.sensor_orientation_);
std::string far_ranges_filename = pcl::getFilenameWithoutExtension(filename) + "_far_ranges.pcd";
if (pcl::io::loadPCDFile(far_ranges_filename.c_str(), far_ranges) == -1)
std::cout << "Far ranges file \\"" << far_ranges_filename << "\\" does not exists.\\n";
else
std::cout << "\\nNo *.pcd file given => Generating example point cloud.\\n\\n";
for (float x = -0.5f; x <= 0.5f; x += 0.01f)
for (float y = -0.5f; y <= 0.5f; y += 0.01f)
PointType point;
point.x = x;
point.y = y;
point.z = 2.0f - y;
point_cloud.points.push_back(point);
point_cloud.width = point_cloud.size();
point_cloud.height = 1;
// -----------------------------------------------
// -----Create RangeImage from the PointCloud-----
// -----------------------------------------------
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
pcl::RangeImage::Ptr range_image_ptr(new pcl::RangeImage);
pcl::RangeImage &range_image = *range_image_ptr;
range_image.createFromPointCloud(point_cloud, angular_resolution, pcl::deg2rad(360.0f), pcl::deg2rad(180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
range_image.integrateFarRanges(far_ranges);
if (setUnseenToMaxRange)
range_image.setUnseenToMaxRange();
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
pcl::visualization::PCLVisualizer viewer("3D Viewer");
viewer.setBackgroundColor(1, 1, 1);
viewer.addCoordinateSystem(1.0f, "global");
pcl::visualization::PointCloudColorHandlerCustom<PointType> point_cloud_color_handler(point_cloud_ptr, 0, 0, 0);
viewer.addPointCloud(point_cloud_ptr, point_cloud_color_handler, "original point cloud");
//PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler (range_image_ptr, 150, 150, 150);
//viewer.addPointCloud (range_image_ptr, range_image_color_handler, "range image");
//viewer.setPointCloudRenderingProperties (PCL_VISUALIZER_POINT_SIZE, 2, "range image");
// -------------------------
// -----Extract borders-----
// -------------------------
pcl::RangeImageBorderExtractor border_extractor(&range_image);
pcl::PointCloud<pcl::BorderDescription> border_descriptions;
border_extractor.compute(border_descriptions);
// ----------------------------------
// -----Show points in 3D viewer-----
// ----------------------------------
pcl::PointCloud<pcl::PointWithRange>::Ptr border_points_ptr(new pcl::PointCloud<pcl::PointWithRange>),
veil_points_ptr(new pcl::PointCloud<pcl::PointWithRange>),
shadow_points_ptr(new pcl::PointCloud<pcl::PointWithRange>);
pcl::PointCloud<pcl::PointWithRange> &border_points = *border_points_ptr,
&veil_points = *veil_points_ptr,
&shadow_points = *shadow_points_ptr;
for (int y = 0; y < (int)range_image.height; ++y)
for (int x = 0; x < (int)range_image.width; ++x)
if (border_descriptions[y * range_image.width + x].traits[pcl::BORDER_TRAIT__OBSTACLE_BORDER])
border_points.points.push_back(range_image[y * range_image.width + x]);
if (border_descriptions[y * range_image.width + x].traits[pcl::BORDER_TRAIT__VEIL_POINT])
veil_points.points.push_back(range_image[y * range_image.width + x]);
if (border_descriptions[y * range_image.width + x].traits[pcl::BORDER_TRAIT__SHADOW_BORDER])
shadow_points.points.push_back(range_image[y * range_image.width + x]);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> border_points_color_handler(border_points_ptr, 0, 255, 0);
viewer.addPointCloud<pcl::PointWithRange>(border_points_ptr, border_points_color_handler, "border points");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "border points");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> veil_points_color_handler(veil_points_ptr, 255, 0, 0);
viewer.addPointCloud<pcl::PointWithRange>(veil_points_ptr, veil_points_color_handler, "veil points");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "veil points");
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> shadow_points_color_handler(shadow_points_ptr, 0, 255, 255);
viewer.addPointCloud<pcl::PointWithRange>(shadow_points_ptr, shadow_points_color_handler, "shadow points");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 7, "shadow points");
//-------------------------------------
// -----Show points on range image-----
// ------------------------------------
pcl::visualization::RangeImageVisualizer *range_image_borders_widget = NULL;
range_image_borders_widget =
pcl::visualization::RangeImageVisualizer::getRangeImageBordersWidget(range_image, -std::numeric_limits<float>::infinity(), std::numeric_limits<float>::infinity(), false,
border_descriptions, "Range image with borders");
// -------------------------------------
//--------------------
// -----Main loop-----
//--------------------
while (!viewer.wasStopped())
range_image_borders_widget->spinOnce();
viewer.spinOnce();
pcl_sleep(0.01);
- 输入命令:
./range_image_border_extraction -h
打印使用说明个如下:
Usage: ./range_image_border_extraction [options] <scene.pcd>
Options:
-------------------------------------------
-r <float> angular resolution in degrees (default 0.5)
-c <int> coordinate frame (default 0)
-m Treat all unseen points to max range
-h this help
- 输入命令:
./range_image_border_extraction -m
使用自动生成的矩形点云,效果如下:


- 输入命令:
./range_image_border_extraction ../../pcd/rabbit.pcd
使用输入的pcd文件,效果如下:

参考:https://pcl.readthedocs.io/projects/tutorials/en/latest/range_image_border_extraction.html#range-image-border-extraction
以上是关于点云处理技术之PCLrange image——提取深度图像的边界并可视化的主要内容,如果未能解决你的问题,请参考以下文章