论文阅读|《带阻塞约束的无缓冲作业车间单元调度与自动导引车》
Posted 码丽莲梦露
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文阅读|《带阻塞约束的无缓冲作业车间单元调度与自动导引车》相关的知识,希望对你有一定的参考价值。
《Scheduling of no buffer job shop cells with blocking constraints and automated guided vehicles》
Applied Soft Computing/2014
1 摘要
阻塞作业车间(blocking job shop,BJS)问题是无缓冲区约束的作业车间问题的扩展。这意味着在当前机器上完成加工后,该工件将保留在该机器上,直到下一台机器可用。这篇文章讨论了BJS问题的一个扩展,考虑使用有限数量的自动导引车(AGV)在不同机器之间转移工件,称为BJS-AGV问题。提出了两种整数非线性规划(INLP)模型。提出了一种改进排课法和局部搜索相结合的两阶段启发式算法来求解BJS-AGV问题。提出了一种基于析取图模型的局部搜索邻域结构。根据BJS-AGV问题的特点,提出了保证搜索邻域可行性的四个原则。给出了一组基准测试的计算结果,其中一些随着不同机器之间的运输时间的增加而扩大。数值结果表明了所提出的两阶段算法的有效性。
2 论文解读
2.1 问题描述
问题可描述为:
(1)n个工件在m台机器上加工,机器之间的工件运输由有限个AGV来实现。
(2)AGV空载的运输时间和不空载的运输时间相同;
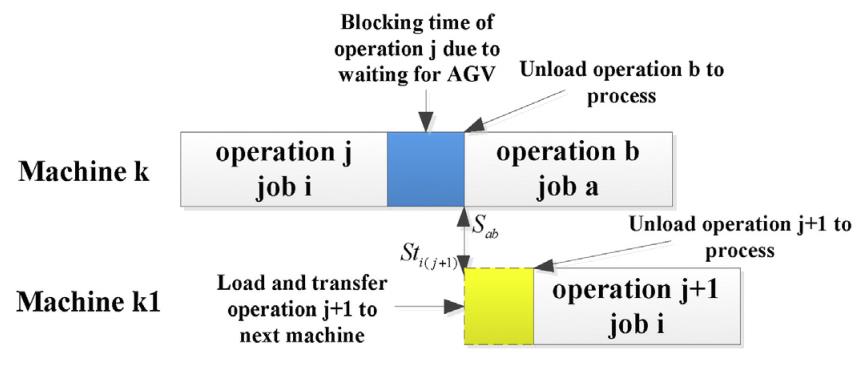
(3)由于无缓冲约束,当前机器不能开始加工下一工序,除非下游机器的工序完成或有AGV来运输,这就是机器被阻塞;
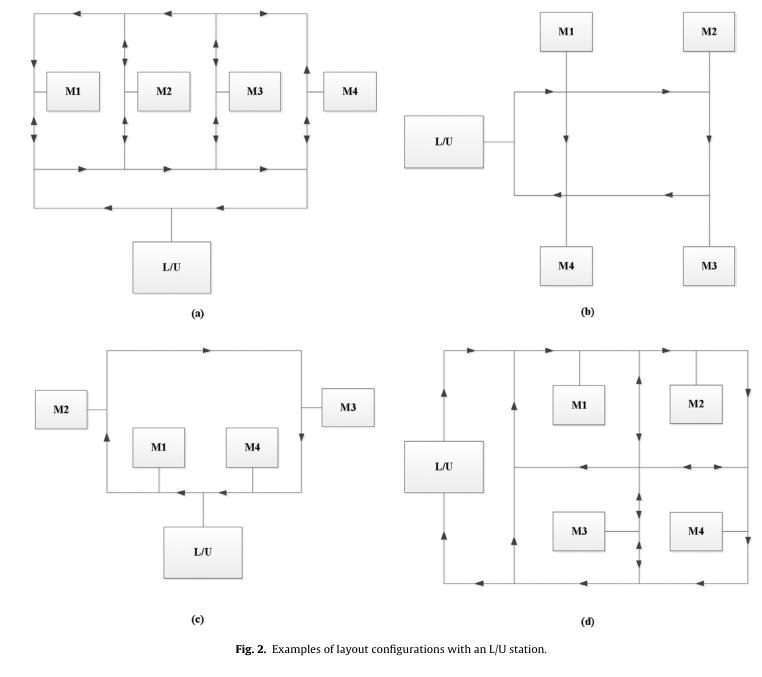
(4)考虑装载/卸载站(L/U站),AGV需要将工件从转载站转移到要执行第一次操作的机器,并从执行最后一次操作的机器返回卸货站。
目标:确定一个可行的时间表,以最小化系统最后一个作业的退出时间(考虑L/U站)或最小化最后一个作业的完成时间(制造跨度)。
阻塞情况的甘特图表示:
2.2 生成可行解
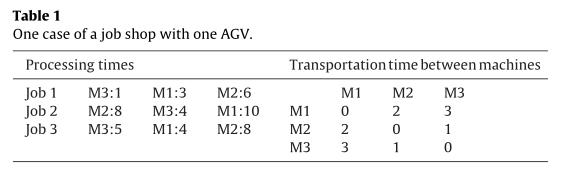
下表为BJS-AGV问题对应的小算例:
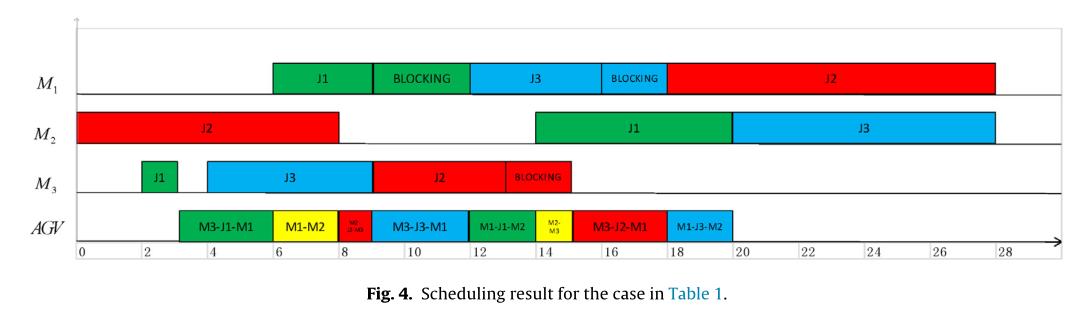
生成可行解结果如下:

以上是关于论文阅读|《带阻塞约束的无缓冲作业车间单元调度与自动导引车》的主要内容,如果未能解决你的问题,请参考以下文章
Tensorflow2.0|基于深度强化学习(DQN)实现动态柔性作业车间调度问题(DFJSP)
论文阅读|《面向多目标柔性作业车间调度的强化学习NSGA-Ⅱ算法》