论文阅读|《基于拍卖的运输能力约束的单元零件调度协作机制》
Posted 码丽莲梦露
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文阅读|《基于拍卖的运输能力约束的单元零件调度协作机制》相关的知识,希望对你有一定的参考价值。
《Auction-based cooperation mechanism for cell part scheduling with transportation capacity constraint》
International Journal of Production Research/2018
1 摘要
本文研究了具有运输能力约束的单元零件调度问题。在该问题中,零件可能需要访问不同的单元,它们必须通过自动引导车辆(AGV)转移。目标是最小化整个过程的制造跨度。建立了一个整数非线性规划(INLP)模型,用于机器、agv的分配和各部件的调度。提出了一种合理的运输方式,并提出了一种基于拍卖的启发式方法来解决这一问题,重点解决了在加工和运输过程中机器与agv之间的协作问题。拍卖包括两个方面:AGV拍卖和机器拍卖。在这两种拍卖中,agv和机器分别充当拍卖人,零部件充当投标人。提出了一种改进的析取图模型,用于优化基于拍卖方法得到的可行解。通过数值实验对基于拍卖的方法和改进的析取图模型进行了验证。结果表明了基于拍卖的方法和改进的分离图模型的有效性,并表明了AGV能力对调度部件的影响。
2 介绍
单元制造(CM)是一种生产系统,在该生产系统中,同类生产过程的部件被分组在不同的制造单元中进行生产。CM十分适用于高度定制和复杂产品的中小批量生产。
根据单元数,CMS的研究可分为:
(1)单单元部件调度(single-cell part scheduling,S-CPS):运输主要在细胞(cell)内将进行,称为细胞内移动.
(2)多单元部件调度(multi-cell part scheduling,M-CPS):在M-CPS中,一个部件不能再一个细胞中完成所有加工,部件访问不同的细胞是不可避免的,相对于细胞内运动,细胞间运动更为重要,称为细胞间运动。
这篇文章解决问题的环境为M-CPS,所有细胞中AGV相同。这篇文章需要解决的问题是:如何时为指定的AGV转移零件、直接移动到该零件或在AGV上完成现有零件的转移后;如果有两个或多个部件等待同一AGV加载,则AGV首先移动到哪个部件;如何确定在AGV上卸现有零件的顺序。
3 论文解读
3.1 问题描述
本文提出了一个由多个制造单元组成的元胞制造系统。每个单元的机器、AGV和零件的分配是事先确定的。对于所有细胞,每种类型只有一台机器。每个部件都有特定的加工路线,每个操作都在一台机器上进行。当一个部件需要从一个单元移动到另一个单元时,需要通过AGV进行转移。我们假设每个部件的体积相同,AGV的容量为n,即每个AGV最多可以同时处理n个部件。我们把每个部件的装卸当作一项运输任务。不同细胞间的运输时间与细胞和工件有关。忽略细胞内运输时间。各细胞内AGV相同,尽量在不同细胞内内平均分配,在细胞间运输时,如果剩余空间足够大,可以将零件装载在AGV上。当零件在机器上完成最后一次加工后,可以立即离开制造系统进行处理。提出的问题的目标是得到一个最小完工时间的调度方案。
3.2 算法求解
3.2.1 生成初始解
在具有运输能力约束的M-CPS问题中,由于供给与需求的关系在不同的时间点是可变的,拍卖商可以估计出机器和agv在每个时间点的资源价格,资源的价格可以揭示竞标者对资源的需求,引导拍卖商将资源分配给最渴望的人,既能使利润最大化,又能提高资源的利用率。因此,拍卖理论可以有效地解决运输能力约束下的M-CPS问题。机器与AGV的拍卖模型的主要结构如下:
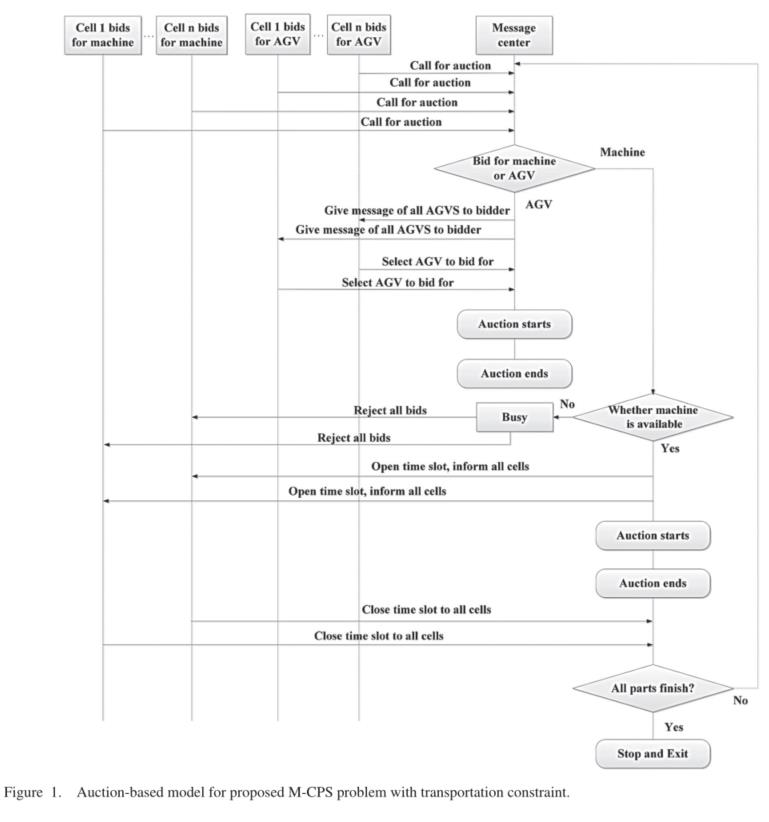
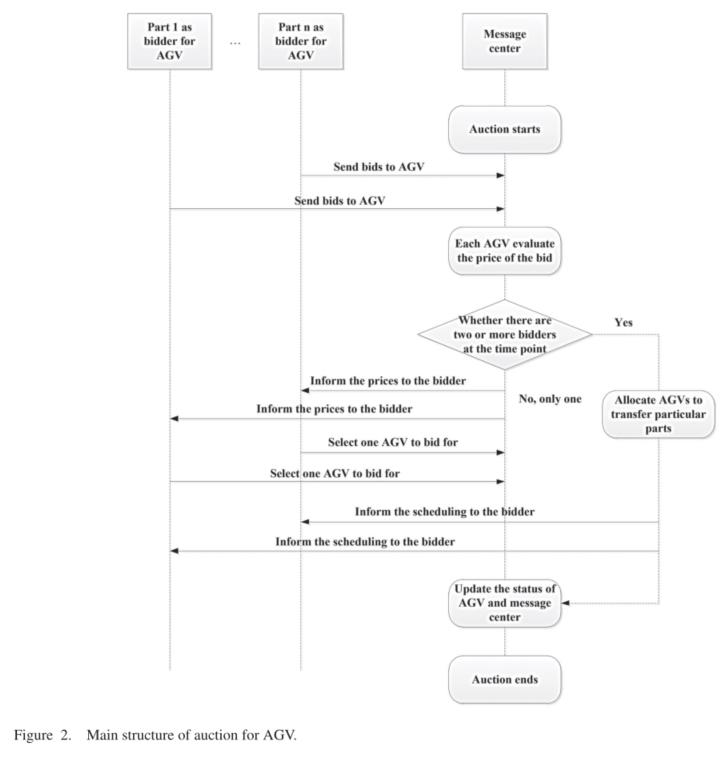
拍卖AGV的主要框架:
当一个零件想要竞标AGV的时隙时,它将包含它希望AGV到达的时间以及何时开始将其转移到下一台机器。要确定这些信息,首先需要确定AGV的(计划)路线。现在,问题出现了,如何确定AGV的路线。当AGV得到第一个运输任务(部件)时,它将直接从原来的位置移动。随着任务的增多,AGV需要决定何时装入(特定)部件以及何时卸货。AGV将根据AGV的当前位置和部件、部件的目的地位置、自由空间大小和规划路线来选择时间。
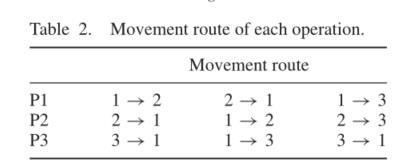
3.2.2 样例
表1就是一个带运输能力约束的M-CPS问题,其中AGV数量为1,容量为2.

于是,AGV在CELL之间的运输路线如下:
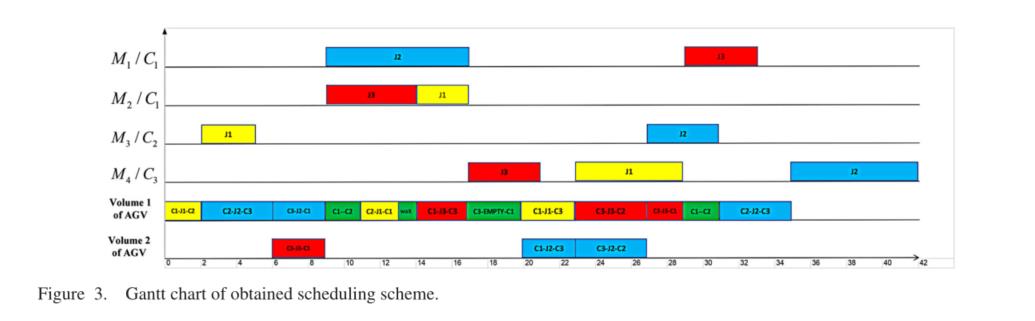
AGV的最终每个时间短的
得到初始解AGV的各时间节点和闲余空间:

Gantt图如下:
 机器拍卖:
机器拍卖:
当操作完成生产安排时,它将打开机器,调用该资源处理。如果机器状态不可用,则将拒绝操作请求,并且操作将持续联系机器,直到机器可用于响应请求。之后,拍卖将开始。然后,拍卖将在拍卖人响应请求时开始。我们处理一个参数ASL,即每次拍卖中(开放)时隙的长度。在提交修改后的投标后,拍卖人将决定谁将获胜,并且存在两种情况:(1)只有一个总成本最高的投标人;(2)多个总成本相同的投标人。对于第一种情况,只有一个投标人可以赢得拍卖;对于第二种情况,拍卖人将以相同的总成本估算不同投标人的投标时隙,如果它们之间存在冲突,被选中的投标人将继续按照上述方式修改竞价,以拍卖时隙,直到一个投标人赢得拍卖。否则,所有总成本最高的投标人都将成为赢家。
3.2.3 改进的析取图模型
基于拍卖方法,我们可以得到有容量约束的M-CPS问题的可行解。
下图表示的是AGV容量为1的JS-AGV析取图:

由于AGV的容量等于1,所以析取图模型可以描述JS-AGV问题。一旦AGV装载了部件,它必须立即转移以卸载该部件。然而,在我们提出的问题中,当AGV的载客量大于1时,AGV在装载零件后可能不会立即转移卸货,如何用析取图模型来描述这一点?同样,由于AGV的容量大于1,当AGV移动到机器上时,如何区分AGV是装卸零件呢?
为了解决这一问题,我们将运输任务分为两部分:装卸任务。例如,T13将被描述为L13和U13,分别表示装载和卸载O13。

4 实验
实验为La01-La40的改编
以上是关于论文阅读|《基于拍卖的运输能力约束的单元零件调度协作机制》的主要内容,如果未能解决你的问题,请参考以下文章