Yunxion资产监测设备,GNSS NEMA语句解析之VTG
Posted 瑞奇Ricky
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Yunxion资产监测设备,GNSS NEMA语句解析之VTG相关的知识,希望对你有一定的参考价值。
物联网作为互联网概念的衍生与发展,通俗来说是将用户延伸到物品之间,使得普通物品能够进行信息交换与通信的新概念。物联网具有三个重要特征 即:普通对象设备化、自治终端互联化、普适服务智能化。这一新概念的发展与应用,使得物品联网成为一种新趋势,除了商业公司通过物联网一举成名的共享单车、共享充电宝等项目外。普通用户或其他企业也寄希望于物联网来监控保障资产安全。
资产监测设备为用户提供解决方案。以无线通信技术为基础,开发出多个系列产品。主要功能包括:定位监测、一键报警、语音通话、温湿度监测、电子围栏等。主要运用于运输状态监控、环境监控、车辆监控等。其中定位监测功能作为开发的重点之一,定位功能能够帮助用户及时对资产监测发挥作用。如资产在运输或存储中遇到问题,该资产监测设备能够根据定位功能第一时间联系云端后台。

但在定位功能开发优化过程中,首先遇到的问题是基于NEMA-0183协议,GPS接收机一般会出现如何在NEMA-0183协议下,兼容不同的导航系统?
分析问题:
基于此问题,在优化定位功能产品过程中,GPS数据处理软件上使用最广泛的NEMA-0183协议同时找到兼容多种导航系统的语句即可解决该问题,使得资产监测的系列产品功能更加完善。
根据市场情况了解到 目前市场上的GPS接收机一般会出现 GPVTG(GPS导航系统)、BDVTG(北斗导航系统)等其他类型导航系统。了解市面上已有的导航系统,包括GPGLL(GPS导航系统)、BDGLL(北斗导航系统)等,这些GPS相关的数据处理软件于导航产品都会兼容协议,协议内容中语句较多,但注意到不同的导航系统的后缀都是VTG。在此基础上,开发人员只需要设计出统一的解析代码,分别解析不同导航系统的VTG语句即可。
/VTG Struct/
typedef struct
{
float cog_t;
char t[5];
float cog_m;
char m[5];
float speed_n;
char n[5];
float speed_k;
char k[5];
}NEMA_VTG_t;/*
*功能:解析GLL语句
*输入:GLL语句
*输出:(NEMA_GLL_t)解析结果
*/
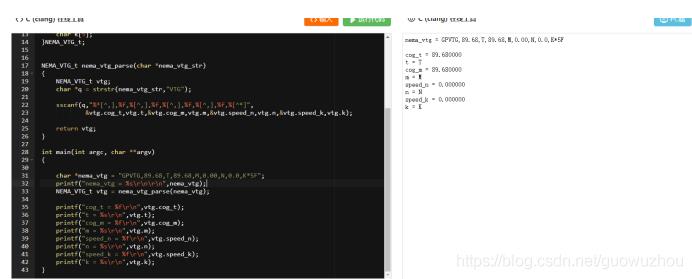
NEMA_VTG_t nema_vtg_parse(char *nema_vtg_str)
{
NEMA_VTG_t vtg;
char *q = strstr(nema_vtg_str,“VTG”);
sscanf(q,"%*[^,],%f,%[^,],%f,%[^,],%f,%[^,],%f,%[^*]",
&vtg.cog_t,vtg.t,&vtg.cog_m,vtg.m,&vtg.speed_n,vtg.n,&vtg.speed_k,vtg.k);
return vtg;
}
/*****************************************************************************/
/*
*示例
*/
int main(int argc, char **argv)
{
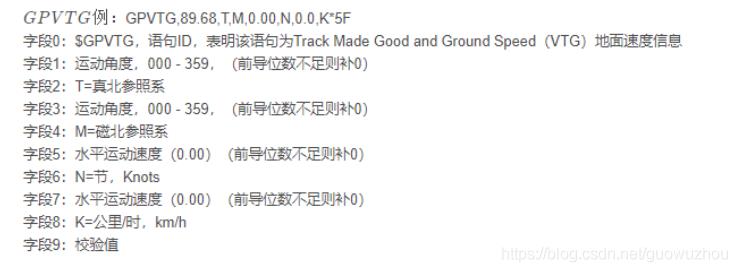
char *nema_vtg = "GPVTG,89.68,T,89.68,M,0.00,N,0.0,K*5F";
printf("nema_vtg = %s\\r\\n\\r\\n",nema_vtg);
NEMA_VTG_t vtg = nema_vtg_parse(nema_vtg);
printf("cog_t = %f\\r\\n",vtg.cog_t);
printf("t = %s\\r\\n",vtg.t);
printf("cog_m = %f\\r\\n",vtg.cog_m);
printf("m = %s\\r\\n",vtg.m);
printf("speed_n = %f\\r\\n",vtg.speed_n);
printf("n = %s\\r\\n",vtg.n);
printf("speed_k = %f\\r\\n",vtg.speed_k);
printf("k = %s\\r\\n",vtg.k);
}
总结:针对不同导航器可能出现不兼容的问题,首先可以总结其语句后缀是否相同,然后设计出统一的解析代码,分别解析不同导航系统的VTG语句即可。
以上是关于Yunxion资产监测设备,GNSS NEMA语句解析之VTG的主要内容,如果未能解决你的问题,请参考以下文章