压缩感知合集5压缩感知简介和数学模型分析
Posted 呆呆象呆呆
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了压缩感知合集5压缩感知简介和数学模型分析相关的知识,希望对你有一定的参考价值。
1 压缩感知的简介
1.1 提出
D. Donoho、E. Candes 及华裔科学家 T. Tao等人提出了一种新的信息获取理论 - 压缩感知(Compressive Sensing)
Donoho D L. Compressed sensing[J] . IEEE Transactions on Information Theory, 2006, 52( 4) : 1289 - 1306
1.2 评价
- 突破了香农-奈奎斯特采样定理的限制。
- 实现对信号采样的同时完成压缩的过程。
- 并不直接测量信号本身, 它使用非自适应线性投影(感知矩阵)来获得信号的整体构造从而直接得到重要的信息, 忽略那些在有损压缩中会被丢弃的信息。
1.3 主要过程
- 稀疏表示:信号稀疏域的选取,是压缩感知理论的基础和前提; (参考信号的稀疏性可以参考另一篇blog【压缩感知合集2】(背景知识)信号稀疏表示的数学推导和解释理解)
- 投影测量:已经证明大部分具有一致分布的随机矩阵都可以作为观测矩阵;
- 重构算法:由于压缩感知采用的是全局非自适应测量方法, 观测数量远远少于信号长度, 从而数据采集量大大减少。但是需要付出的代价是信号重建算法的软件成本。
1.4 简洁概括
如果信号是稀疏的,那么它可以由远低于采样定理要求的采样点重建恢复。
2 压缩感知的数学模型
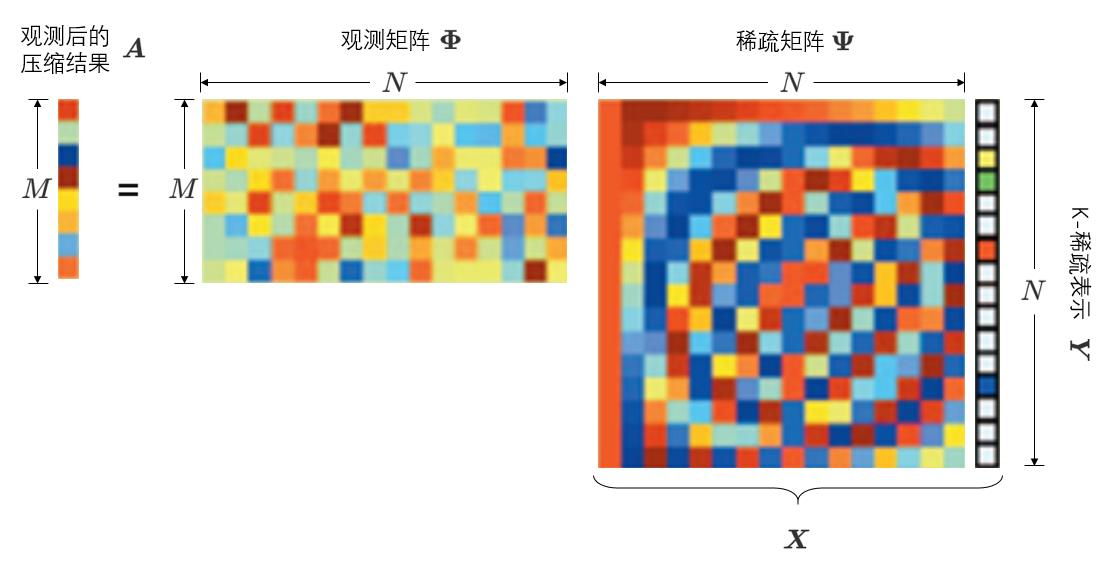
给定输入信号 X ∈ R N × 1 \\boldsymbol{X} \\in \\mathbb{R}^{N\\times1} X∈RN×1,最终想要得到压缩信号 A ∈ R M × 1 \\boldsymbol{A} \\in \\mathbb{R}^{M\\times1} A∈RM×1, K < < N K<<N K<<N
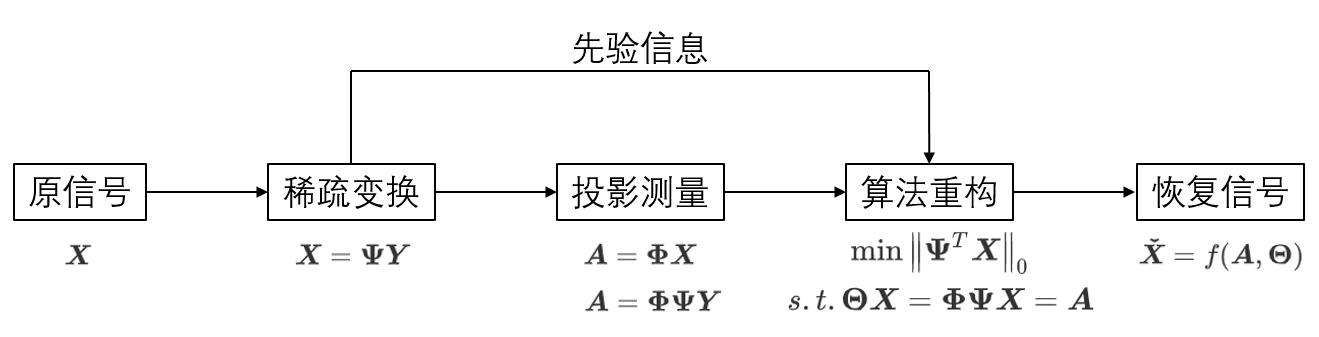
2.1 压缩过程(感知过程)分为(稀疏变换和投影测量)
2.1.1 稀疏变换(稀疏表示、稀疏过程)
找到一个基或者过完备字典
Ψ
\\boldsymbol{\\Psi}
Ψ,使得信号
X
\\boldsymbol{X}
X在
Ψ
\\boldsymbol{\\Psi}
Ψ域是稀疏的,(参考补充材料稀疏)满足下面的公式
X
=
Ψ
Y
\\boldsymbol{X}=\\boldsymbol{\\Psi} \\boldsymbol{Y}
X=ΨY
因为是规范正交基所以实现变换系数也就是压缩信号:
Y
=
Ψ
T
X
\\boldsymbol{Y} = \\boldsymbol{\\Psi}^T \\boldsymbol{X}
Y=ΨTX,其中
Y
\\boldsymbol{Y}
Y 是
X
\\boldsymbol{X}
X 的等价或逼近的稀疏表示。变换基
Ψ
\\boldsymbol{\\Psi}
Ψ的选择可以为某
种已被广泛应用的基,如小波基、傅里叶基、局部傅里叶基等。另外,可以使用紧框架(原子字典)来对信号进行稀疏表示, 如曲线波和轮廓波, 这两类变换基具有更好的方向性,并且各向异性,少量系数即可有效地捕捉图像的边缘轮廓,在边缘表示方面优于小波。
2.1.2 投影测量(测量过程)
观测矩阵
Φ
∈
R
M
×
N
\\boldsymbol{\\Phi} \\in \\mathbb{R}^{M\\times N}
Φ∈RM×N,观测矩阵也叫测量矩阵,感知矩阵,实现的功能是对信号进行降维和压缩
A
=
Φ
X
\\boldsymbol{A} = \\boldsymbol{\\Phi}\\boldsymbol{X}
A=ΦX
同时也是对在
Ψ
\\boldsymbol{\\Psi}
Ψ域上的稀疏投影
Y
\\boldsymbol{Y}
Y进行投影测量
A
=
Φ
Ψ
Y
\\boldsymbol{A} = \\boldsymbol{\\Phi}\\boldsymbol{\\Psi} \\boldsymbol{Y}
A=ΦΨY
矩阵
Φ
\\boldsymbol{\\Phi}
Φ需要满足的性质(需要保证稀疏向量
Y
\\boldsymbol{Y}
Y 从
N
N
N维降到
K
K
K 维时重要信息不被破坏。)
变换基 Ψ \\boldsymbol{\\Psi} Ψ不相关(会在之后的blog中有叙述)
有限等距性(Restricted Isometry Property,RIP)(会在之后的blog中有叙述)
2.1.3 整个压缩过程总结
整个压缩过程也可以被称为感知过程
A
=
Φ
X
=
Φ
Ψ
Y
=
Θ
Y
\\boldsymbol{A} =\\boldsymbol{\\Phi}\\boldsymbol{X} = \\boldsymbol{\\Phi}\\boldsymbol{\\Psi} \\boldsymbol{Y} = \\boldsymbol{\\Theta}\\boldsymbol{Y}
A=ΦX=ΦΨY=ΘY
Θ \\boldsymbol{\\Theta} Θ即为感知过程的核心命名为感知矩阵
| 符号 | 含义 | 维度 | 属性 |
|---|---|---|---|
| X \\boldsymbol{X} X | 输入信号;待压缩信号 | R N × 1 \\mathbb{R}^{N\\times1} RN×1 | 未知,需要恢复 |
| Φ \\boldsymbol{\\Phi} Φ | 观测矩阵;测量矩阵 | R M × N \\mathbb{R}^{M \\times N} RM×N | 已知(非自适应性) |
| Ψ \\boldsymbol{\\Psi} Ψ | 变换矩阵;变换基矩阵;稀疏基矩阵;稀疏矩阵;正交基字典矩阵 | R N × N \\mathbb{R}^{N\\times N} RN×N | 已知(非自适应性) |
| Y \\boldsymbol{Y} Y | 正交基变换后的稀疏表示 | R N × 1 \\mathbb{R}^{N\\times1} RN×1 | 未知,需要恢复 |
| Θ \\boldsymbol{\\Theta} Θ | 感知矩阵 | R M × N \\mathbb{R}^{M\\times N} RM×N | 已知(非自适应性) |
| A \\boldsymbol{A} A | 观测压缩所得到压缩信号 | R M × 1 \\mathbb{R}^{M\\times1} RM×1 | 已知 |
2.2 恢复过程:重构算法的数学表示
在得到已经压缩完的采样信号
A
\\boldsymbol{A}
A后,根据确定的固定性观测矩阵
Φ
\\boldsymbol{\\Phi}
Φ和稀疏矩阵
Ψ
\\boldsymbol{\\Psi}
Ψ的先验信息进行恢复,数学表达如下
X
ˇ
=
f
(
A
,
Θ
)
\\boldsymbol{\\check{X}}=f(\\boldsymbol{A},\\boldsymbol{\\Theta})
Xˇ=f(A,Θ)
若
N
=
M
N=M
N=M,正定方程有唯一解
而 M < < N M<<N M<<N,欠定方程
一般可以抽象为如下求解任务
min
∥
Ψ
T
X
∥
0
s
.
t
.
Θ
X
=
Φ
Ψ
X
=
A
\\min \\left\\| \\boldsymbol{\\Psi}^{T} \\boldsymbol{X}\\right\\|_{0} \\\\s.t. \\boldsymbol{\\Theta} \\boldsymbol{X}=\\boldsymbol{\\Phi}\\boldsymbol{\\Psi}\\boldsymbol{X}= \\boldsymbol{A}
min∥∥∥ΨTX∥∥∥0s.t.ΘX=ΦΨX=A
注意
若 N = M N=M N=M,则可轻松由 A \\boldsymbol{A} A解出 X \\boldsymbol{X} X和 Y \\boldsymbol{Y} Y
而
M
<
<
N
M<<N
M<<N,可根据稀疏表示下的信号
Y
\\boldsymbol{Y}
Y和矩阵所具有的RIP特性重构
LAST、参考文献
以上是关于压缩感知合集5压缩感知简介和数学模型分析的主要内容,如果未能解决你的问题,请参考以下文章
压缩感知合集7压缩感知RIP有限等距性:定义解析,理解说明,数学原理推导
压缩感知合集9压缩感知的OMP算法(算法步骤分析举例分析说明总结和缺陷)