压缩感知合集7压缩感知RIP有限等距性:定义解析,理解说明,数学原理推导
Posted 呆呆象呆呆
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了压缩感知合集7压缩感知RIP有限等距性:定义解析,理解说明,数学原理推导相关的知识,希望对你有一定的参考价值。
0 前情提要
0.1 数学模型和总体框图如下
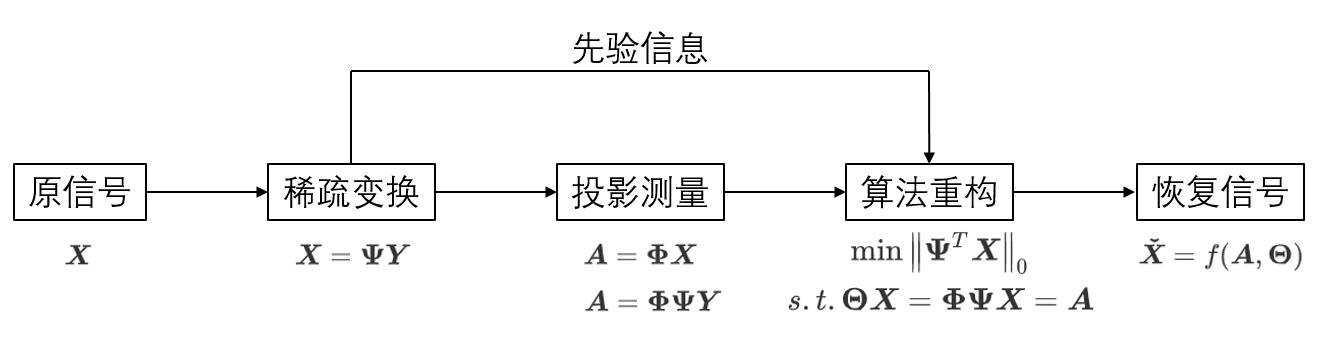
给定输入信号 X ∈ R N × 1 \\boldsymbol{X} \\in \\mathbb{R}^{N\\times1} X∈RN×1,最终想要得到压缩信号 A ∈ R M × 1 \\boldsymbol{A} \\in \\mathbb{R}^{M\\times1} A∈RM×1, K < < N K<<N K<<N
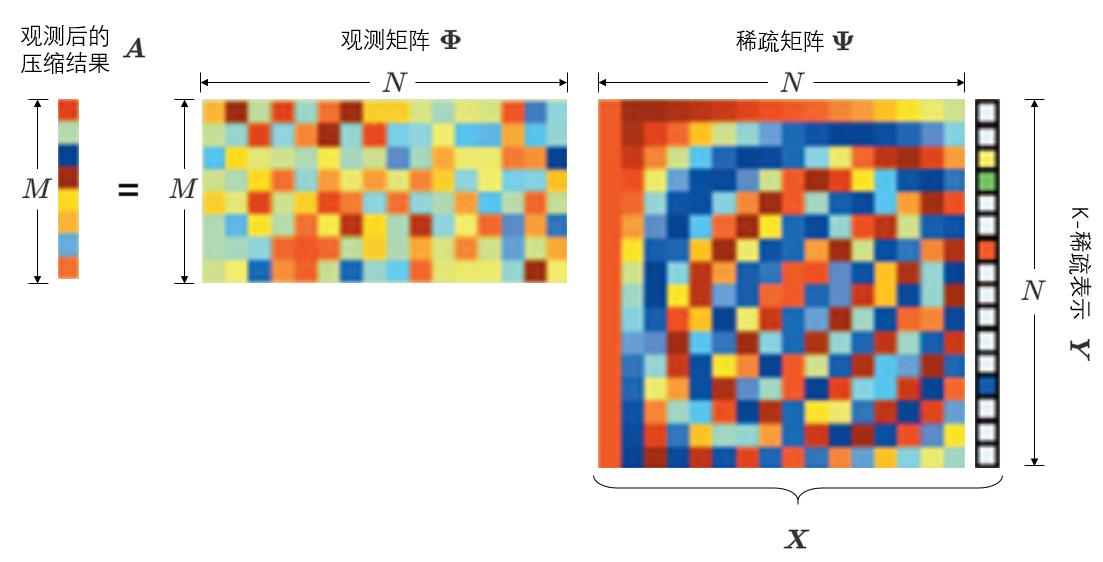
0.2 压缩过程图例分析如下
整个压缩过程也可以被称为感知过程
A
=
Φ
X
=
Φ
Ψ
Y
=
Θ
Y
\\boldsymbol{A} =\\boldsymbol{\\Phi}\\boldsymbol{X} = \\boldsymbol{\\Phi}\\boldsymbol{\\Psi} \\boldsymbol{Y} = \\boldsymbol{\\Theta}\\boldsymbol{Y}
A=ΦX=ΦΨY=ΘY
Θ \\boldsymbol{\\Theta} Θ即为感知过程的核心命名为感知矩阵
| 符号 | 含义 | 维度 | 属性 |
|---|---|---|---|
| X \\boldsymbol{X} X | 输入信号;待压缩信号 | R N × 1 \\mathbb{R}^{N\\times1} RN×1 | 未知,需要恢复 |
| Φ \\boldsymbol{\\Phi} Φ | 观测矩阵;测量矩阵 | R M × N \\mathbb{R}^{M \\times N} RM×N | 已知(非自适应性) |
| Ψ \\boldsymbol{\\Psi} Ψ | 变换矩阵;变换基矩阵;稀疏基矩阵;稀疏矩阵;正交基字典矩阵 | R N × N \\mathbb{R}^{N\\times N} RN×N | 已知(非自适应性) |
| Y \\boldsymbol{Y} Y | 正交基变换后的稀疏表示 | R N × 1 \\mathbb{R}^{N\\times1} RN×1 | 未知,需要恢复 |
| Θ \\boldsymbol{\\Theta} Θ | 感知矩阵,传感矩阵 | R M × N \\mathbb{R}^{M\\times N} RM×N | 已知(非自适应性) |
| A \\boldsymbol{A} A | 观测压缩所得到压缩信号 | R M × 1 \\mathbb{R}^{M\\times1} RM×1 | 已知 |
0.3 算法重构恢复过程如下
在得到已经压缩完的采样信号
A
\\boldsymbol{A}
A后,根据确定的固定性观测矩阵
Φ
\\boldsymbol{\\Phi}
Φ和稀疏矩阵
Ψ
\\boldsymbol{\\Psi}
Ψ的先验信息进行恢复,数学表达如下
X
ˇ
=
f
(
A
,
Θ
)
\\boldsymbol{\\check{X}}=f(\\boldsymbol{A},\\boldsymbol{\\Theta})
Xˇ=f(A,Θ)
而
M
<
<
N
M<<N
M<<N,欠定方程,一般可以抽象为如下求解任务
min ∥ Ψ T X ∥ 0 s . t . Θ X = Φ Ψ X = A \\min \\left\\| \\boldsymbol{\\Psi}^{T} \\boldsymbol{X}\\right\\|_{0} \\\\s.t. \\boldsymbol{\\Theta} \\boldsymbol{X}=\\boldsymbol{\\Phi}\\boldsymbol{\\Psi}\\boldsymbol{X}= \\boldsymbol{A} min∥∥∥ΨTX∥∥∥0s.t.ΘX=ΦΨX=A
注意
若 N = M N=M N=M,则可轻松由 A \\boldsymbol{A} A解出 X \\boldsymbol{X} X和 Y \\boldsymbol{Y} Y
而
M
<
<
N
M<<N
M<<N,可根据稀疏表示下的信号
Y
\\boldsymbol{Y}
Y和矩阵所具有的RIP性质重构
1 发展历史
RIP是压缩感知领域的一个重要概念,主要可以被用来分析还原算法的表现好坏。
| 年份 | 事件 | 相关论文/Reference |
|---|---|---|
| 2005 | Emmanuel Candès、陶哲轩提出了当\\delta_{2s}<1时可以保证(P0)有唯一解,并且用反证法对此问题进行了证明,大概思路是假设有两个解,会发现从RIP性质的不等式中可以得出这两个解是相等的。 | Candes, E.; Tao, T. (2005). Decoding by linear programming. IEEE Transactions on Information Theory. 59(8):4203-4215. |
| 2006 | Emmanuel Candès、陶哲轩和David Donoho证明了在已知信号稀疏性的情况下,可能凭借较采样定理所规定更少的采样数重建原信号,这一理论也是压缩感知的基石。 | Candès, E.; Romberg, J. K.; Tao, T. (2006). Stable signal recovery from incomplete and inaccurate measurements. Communications on Pure and Applied Mathematics. 59 (8): 1207–1223. |
| 2007 | Richard Baraniuk等人提出了一种简单的技术,用于验证压缩感知基础的随机矩阵的RIP性质。 | Baraniuk, R.G., Davenport, M.A., DeVore, R.A., & Wakin, M.B. (2007). A Simple Proof of the Restricted Isometry Property for Random Matrices. |
| 2008 | Emmanuel Candès证明了当
δ
2
K
<
1
\\delta_{2K}<1
δ2K<1 时可以保证零范数问题有唯一的稀疏解,而当
δ
2
s
s
<
2
−
1
\\delta_{2s}s<\\sqrt2-1
δ2ss<2−1 时则可以保证0范数和1范数等价。零范数求解为NP-hard问题,在此前提下将其转化为1范数求最优化问题,这时是个凸优化,对于求解很有帮助。 | Candes, E. (2008). The restricted isometry property and its implications for compressedsensing. Comptes Rendus Mathematique. 346(8-9): 589-592. |
2 本篇的主要思路
前文有一定的简单介绍和逻辑分析(【压缩感知合集6】压缩感知为什么可以恢复信号;为什么需要满足稀疏性条件、RIP条件、矩阵不相关等限制条件才可以恢复信号的逻辑分析)这一篇文章我们详细理解一下,这个条件的必要性
主要的问题如下
RIP性质是什么?- 为什么需要
RIP性质? - 为什么介绍
K阶RIP性质后恢复K稀疏信号又要用2K阶RIP性质?
3 RIP性质定义
RIP性质:有限等距性质(Restricted Isometry Property,RIP)
不同文献上表达RIP的方式不同,一般主要有以下几种(为了不影响理解我将论文中使用的一些字母进行了替换,换成了我前文例子中的字母表示,但是不影响他对性质的具体定义):
中文定义一
传感矩阵 Θ \\boldsymbol{\\Theta} Θ 的RIP参数 δ k \\delta_{k} δk 为满足下式的最小值 δ \\delta δ
( 1 − δ ) ∥ Y ∥ 2 2 ⩽ ∥ Θ Y ∥ 2 2 ⩽ ( 1 + δ ) ∥ Y ∥ 2 2 (1-\\delta)\\|\\boldsymbol{Y}\\|_{2}^{2} \\leqslant\\left\\|\\boldsymbol{\\Theta}{\\boldsymbol{Y}}\\right\\|_{2}^{2} \\leqslant(1+\\delta)\\|\\boldsymbol{Y}\\|_{2}^{2} (1−δ)∥Y∥22⩽∥ΘY∥22⩽(1+δ)∥Y∥22
其中 Y \\boldsymbol{Y} Y 为 K K K 稀疏信号。若 δ K < 1 \\delta_{K} < 1 δK<1 ,则称测量矩阵 Θ \\boldsymbol{\\Theta} Θ 满足 K K K 阶RIP。王强,李佳,沈毅.压缩感知中确定性测量矩阵构造算法综述[J]. 电子学报,2013,41(10):2041-2050.
中文定义二
为了重构稀疏信号,Candès和Tao给出并证明了传感矩阵 Θ \\boldsymbol{\\Theta} Θ 必须满足约束等距性条件。
对于任意 c ∈ R ∣ T ∣ \\boldsymbol{c} \\in \\boldsymbol{R}^{|T|} c∈R∣T∣ 和存在常数 δ K ∈ ( 0 , 1 ) \\delta_{K} \\in(0,1) δK∈(0,1) , 如果
( 1 − δ K ) ∥ c ∥ 2 2 ≤ ∥ Θ T c ∥ 2 2 ≤ ( 1 + δ K ) ∥ c ∥ 2 2 \\left(1-\\delta_{K}\\right)\\|\\boldsymbol{c}\\|_{2}^{2} \\leq\\left\\|\\boldsymbol{\\Theta}_{T} \\boldsymbol{c}\\right\\|_{2}^{2} \\leq\\left(1+\\delta_{K}\\right)\\|\\boldsymbol{c}\\|_{2}^{2} (1−δK)∥c∥22≤∥ΘTc∥22≤(1+δK)∥c∥22
成立,其中 T ⊂ { 1 , ⋯ , N } T \\subset\\{1, \\cdots, N\\} T⊂{1,⋯,N} ,以上是关于压缩感知合集7压缩感知RIP有限等距性:定义解析,理解说明,数学原理推导的主要内容,如果未能解决你的问题,请参考以下文章