合肥光源储存环束流三维参数测量系统的进一步结果4
Posted 卡西莫多了
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了合肥光源储存环束流三维参数测量系统的进一步结果4相关的知识,希望对你有一定的参考价值。
上面的结果里面提到过工作点的测量,这个3维系统有工作点的谱,只算是个副产品,也没怎么好好留心过,示波器这么被我换来换去的接,偶尔截个图放在那,现在把他们拿出来放在一起摆一摆:
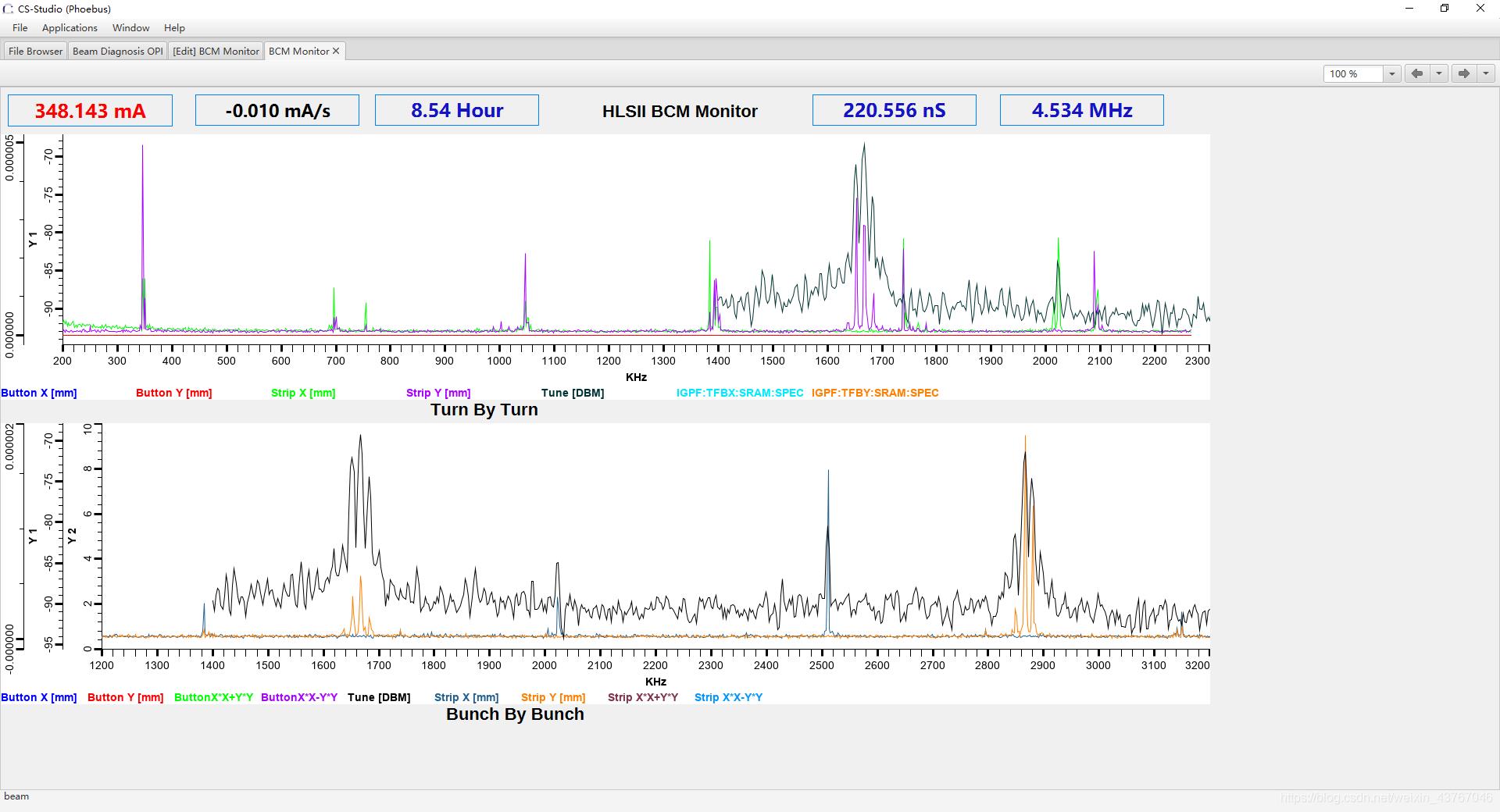
合肥光源回旋频率为4.533MHz,几个图中的灰线是BBQ测工作点的谱线,1.66MHz和2.87MHz左右的那个峰是Y工作点的峰位,2.02MHz和2.51MHz左右的那个峰是X的,下图第一张是鼎阳示波器测条带的结果:
![]()
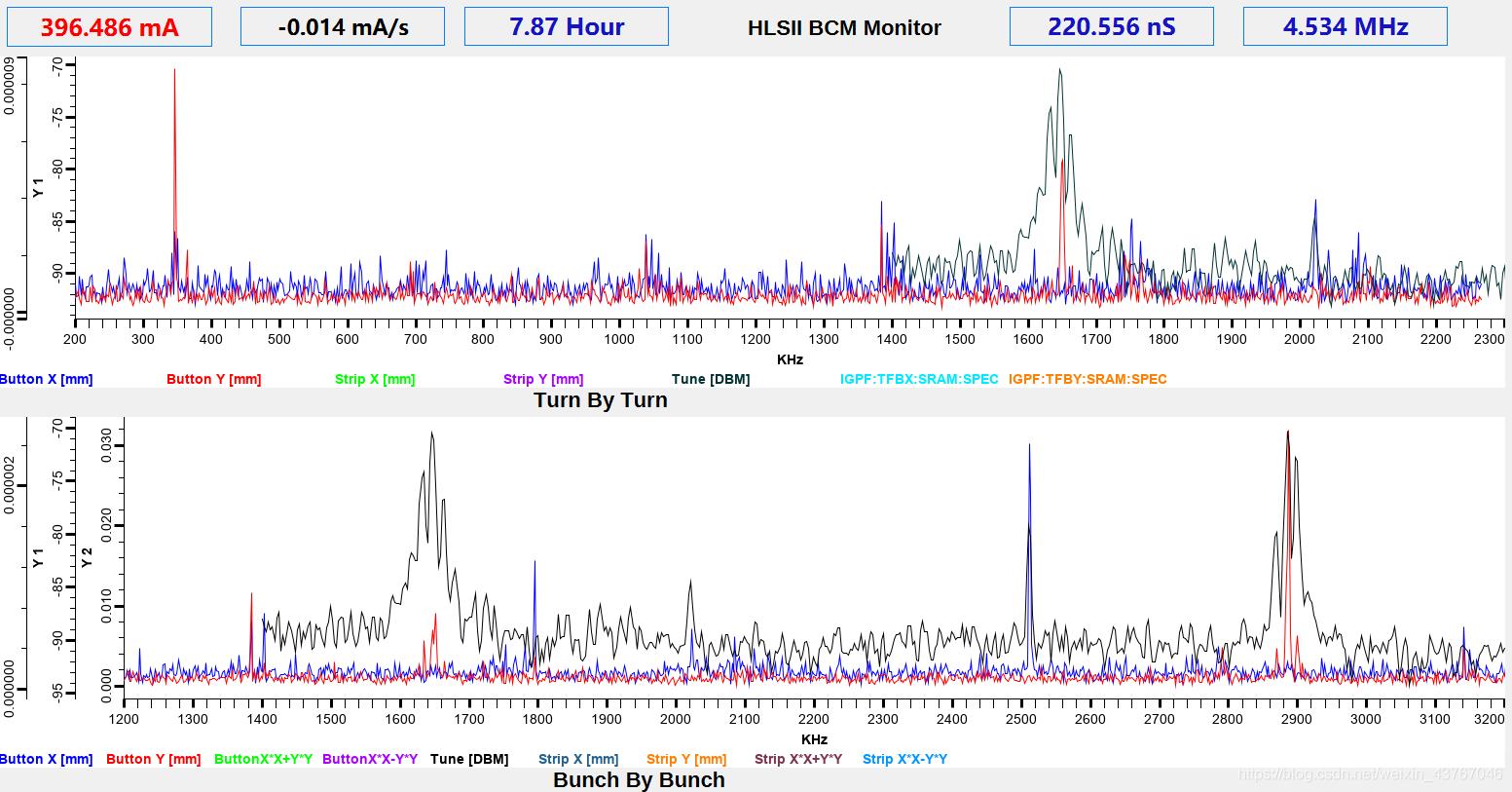
下面这个图是力科WavePro 804HD-MS(在使用两个通道时,能达到8GHz带宽和20Gs/s的采样率;4通道同时工作时能达到4GHz带宽和10Gs/s采样率)测纽扣的结果:
![]()
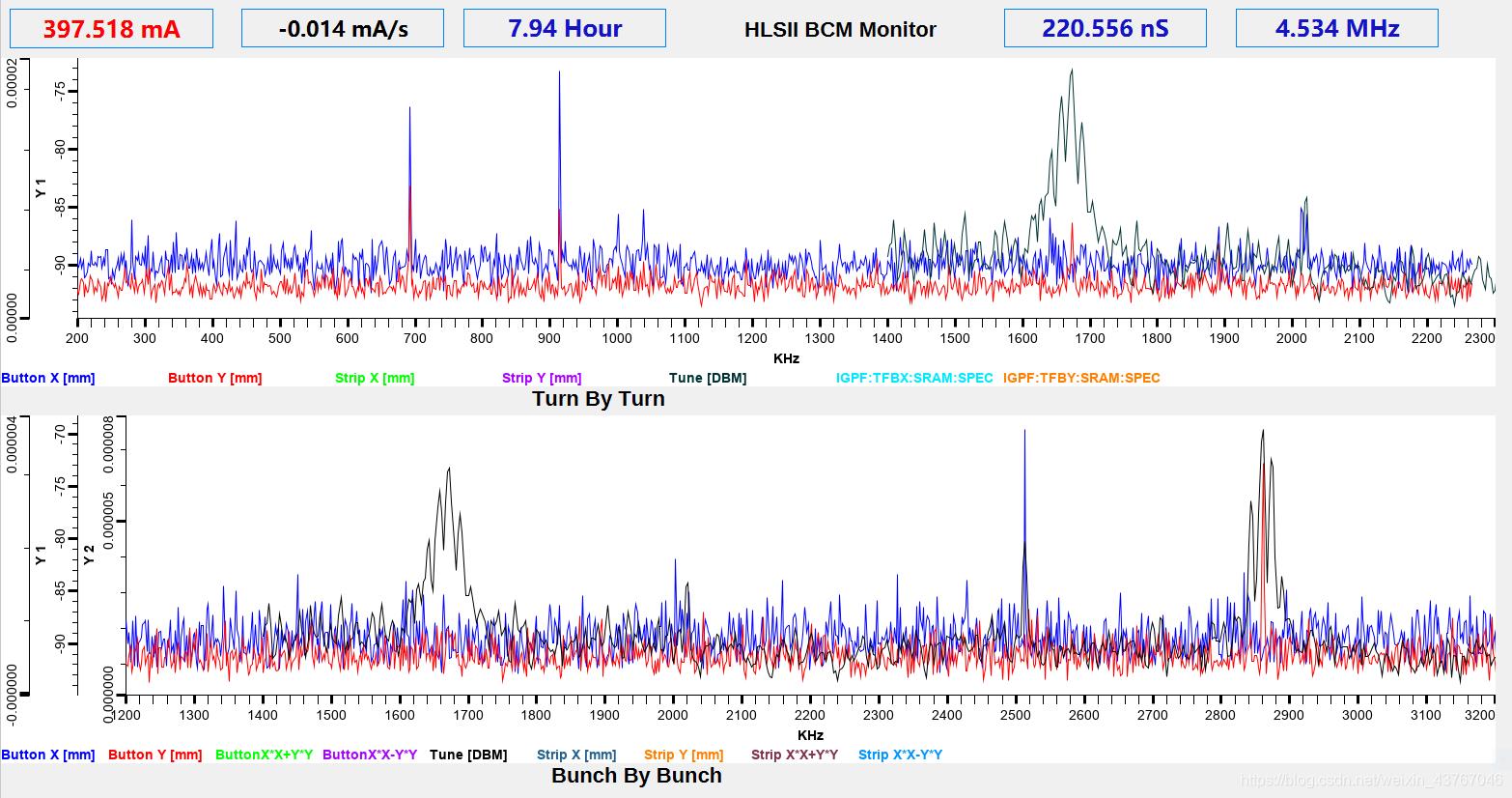
下面这张图是![]()
![]() 测的结果:
测的结果:
![]()
从三张图都能看到工作点位置X,Y的频谱对应的峰,前两张图有一些杂峰,大约在0.34XMHz、0.69XMHz、1.04XMHz、1.38XMHz、1.74XMHz、2.08XMHz等,貌似都是0.34XMHz高次谐波分量的一些点位,估计是数据处理过程中引入的,一直没去找找原因,忽略这些位置的杂峰,谱线还是很清爽的;第三张图是力科百万级的8bit测的结果,8bit就是8bit,谱的信噪比和前两张12bit的结果差了很多,不过也可以看到峰位。Y工作点的峰位,BBQ和BPM谱线都有多峰结构,不知道是不是纵向震荡的14KHz耦合过来的,有待更细的分析,欢迎路过的专家指点。
以上是关于合肥光源储存环束流三维参数测量系统的进一步结果4的主要内容,如果未能解决你的问题,请参考以下文章
三维模型反射光照射实现物体表面高光实现(WebGL进阶04)