Nvidia Isaac Sim ROS机器人仿真和AMR开发环境
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Nvidia Isaac Sim ROS机器人仿真和AMR开发环境相关的知识,希望对你有一定的参考价值。
效果非常赞。
☞ 2020年最好的机器人学仿真工具软件汇总_zhangrelay的博客-CSDN博客_机器人仿真软件
由 Omniverse 提供支持的 NVIDIA Isaac Sim 是一种可扩展的机器人仿真应用程序和合成数据生成工具,可支持逼真、物理精确的虚拟环境来开发、测试和管理基于 AI 的机器人。
物流场景AMR

丰富场景生成器
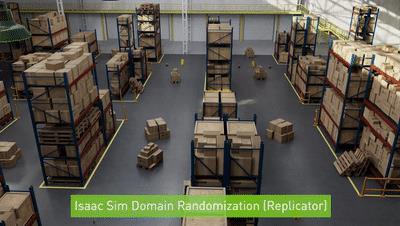
导航

逼真的模拟
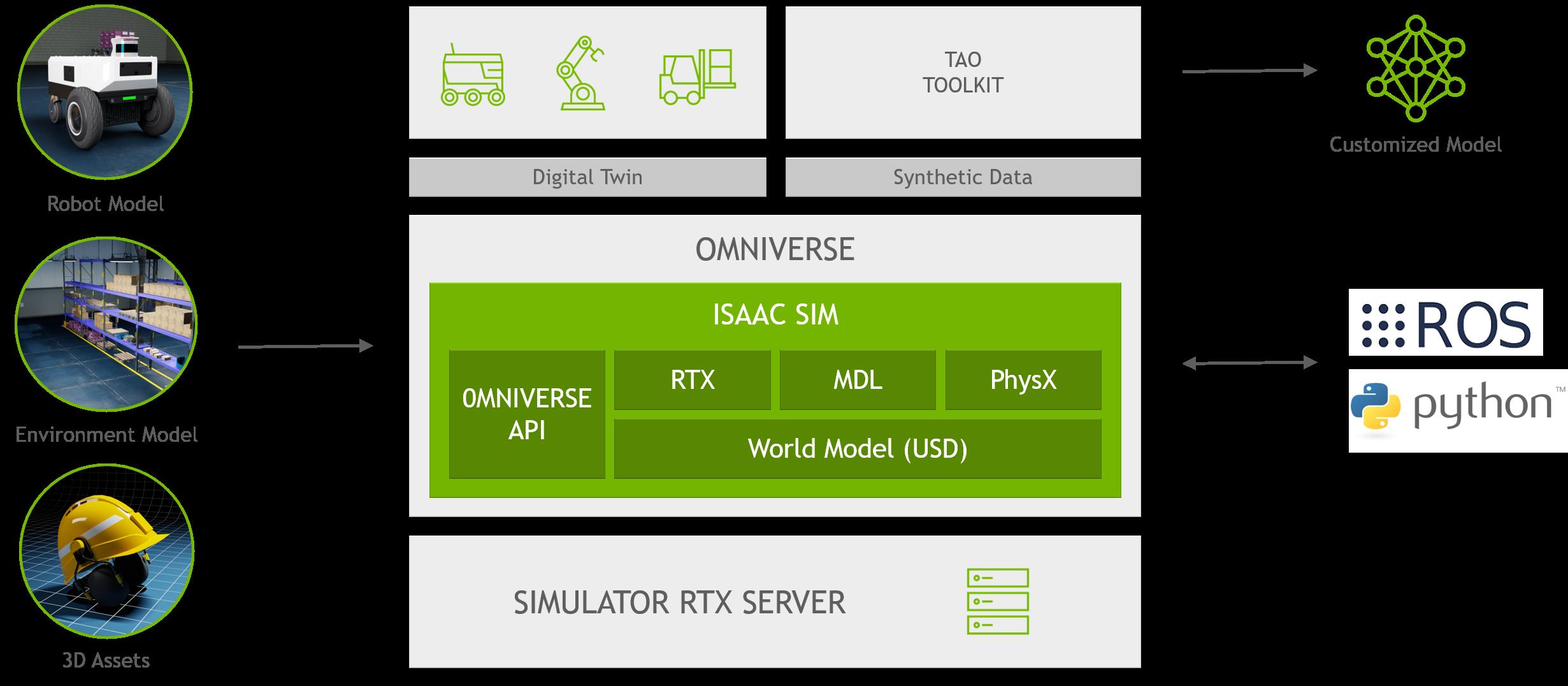
Isaac Sim 利用了 Omniverse 平台的强大模拟技术,包括使用 PhysX 5 支持 GPU 的高级物理模拟、实时光线和路径跟踪的真实感,以及基于物理渲染的 MDL 材质定义支持。
模块化架构涵盖广泛的应用程序
没有模拟器可以解决所有机器人仿真挑战。但 Isaac Sim 旨在解决许多最常见的机器人用例,包括操作、导航、训练数据的合成数据生成。此外,由于其模块化设计,该工具可以定制并扩展到许多新的用例。
无缝连接和互操作性
借助 NVIDIA Omniverse,Isaac Sim 受益于 Omniverse Nucleus 和 Omniverse 连接器,支持以美元协作构建、共享和导入环境和机器人模型。通过 Isaac SDK 和 ROS/ROS2 接口、功能齐全的 Python 脚本、用于导入机器人和环境模型的插件,轻松将机器人的大脑连接到虚拟世界。
System Requirements
This Isaac ROS package is designed and tested to be compatible with ROS2 Foxy on Jetson hardware.
Jetson
Jetson AGX Xavier or Xavier NX
JetPack 4.6.1
x86_64
Ubuntu 20.04+
CUDA 11.4 supported discrete GPU
Nvidia driver version >= 470.103.01
Note: For best performance on Jetson, ensure that power settings are configured appropriately (Power Management for Jetson).
参考链接:
- github.com/NVIDIA-ISAAC-ROS/isaac_ros_visual_slam
- github.com/NVIDIA-ISAAC-ROS/isaac_ros_nvblox
- developer.nvidia.com/isaac-sim
以上是关于Nvidia Isaac Sim ROS机器人仿真和AMR开发环境的主要内容,如果未能解决你的问题,请参考以下文章
Isaac ROS 2 Humble 预览之全新立体视觉感知→机器翻译←