cartographer使用二维码读码器和2D激光雷达实现的混合定位
Posted COCO_PEAK_NOODLE
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了cartographer使用二维码读码器和2D激光雷达实现的混合定位相关的知识,希望对你有一定的参考价值。
问题:当环境一直发生变化,激光定位容易丢失,如何提供稳定的机器人定位信息?
以前我们的AGV一般都会使用二维码一米一贴实现纯二维码导航,但是加上了激光的二维码AGV是否还要一米一贴呢?
对于复杂变化的场景,激光导航也会出现位置丢失的问题,那么是否可以通过添加二维码作为landmark为激光导航提供定位信息呢?答案是肯定的,同时也不用一米一贴,测试场景使用5米一贴二维码实现高动态变化场景下的混合导航。精度测试为+/-10mm
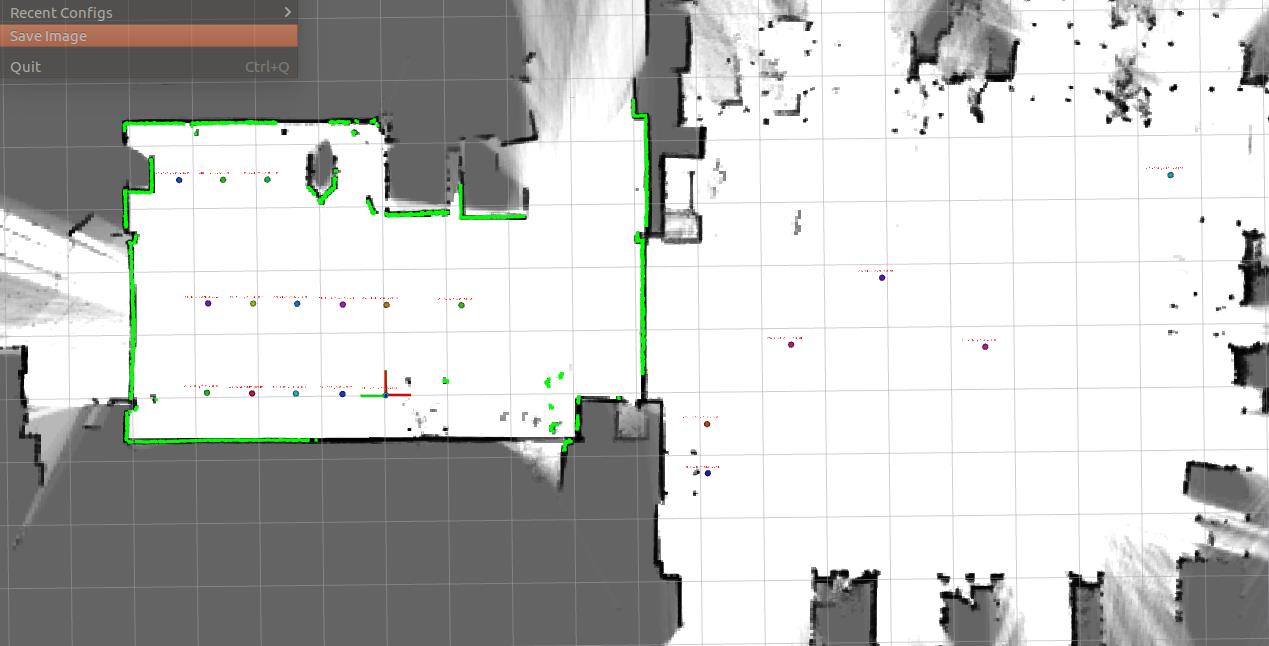
方式和aruco或者apriltag的作为landmark的方式相同,二维码车型一般会安装二维码读码器(大华或者海康品牌)在车体的正中央的位置,测试生成地图如下:
以上是关于cartographer使用二维码读码器和2D激光雷达实现的混合定位的主要内容,如果未能解决你的问题,请参考以下文章
激光slam课程学习笔记--第8课:cartographer代码基本介绍