仿真迭代 | 仿真镜像升级,虚拟机也能跑到60FPS,搞ROS机器人开发,你总用得到
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了仿真迭代 | 仿真镜像升级,虚拟机也能跑到60FPS,搞ROS机器人开发,你总用得到相关的知识,希望对你有一定的参考价值。
在我们论坛或者群里的日常问答中,对于开发者而言问的最多的问题就是,编译环境问题,各自工具链安装不上。操作系统对于库的版本依赖比较严格,还有一些网络问题,对于有经验的开发者来说,安装开发环境也是一件非常麻烦的事情。以至于有个段子调侃:搞程序开发,安装开发工具环境用2天,实际开发2小时……对于很多新手来讲会走很多弯路,甚至是劝退。
阿木实验室尝试了各种方法来制作稳定可用的镜像,帮助大家提升研发效率。让大家不用把时间浪费在安装环境和其他的网络问题上,把更多的时间花在算法研究上。
这个开发环境集成了如下工具链:
1、操作系统:Ubuntu 18.04
2、软件:ROS melodic、Gazebo、Promethus、Promethus_px4(基于原版PX4-V1.11.1)、Mavros
3、建图模块依赖:Rtabmap、Octomap
4、激光SLAM依赖:Cartographer
5、规划模块依赖:非线性优化工具箱 NLopt
6、多媒体处理框架:Gstreamer
对于一般的ROS机器人研究,这个开发环境镜像基本都可以满足,尤其是那些刚刚入手机器人开发的同学。
仿真镜像升级特点
本次仿真镜像升级带来的好处,系统的兼容性更好,支持更多的电脑,再也不用担心NVMe的SSD硬盘无法读取的问题,同样也支持vmware虚拟机安装使用。
Prometheus项目
此项目基于PX4开源飞控固件,旨在为PX4开发者配套成熟可用的机载电脑端程序,提供更加简洁快速的开发体验。目前已集成建图、定位、规划、控制及目标检测等模块,并配套有Gazebo仿真测试代码。
本次我们提供的仿真系统,适配于Prometheus项目。
可以实现如下功能: 
虚拟机运行仿真镜像测试
本次用的测试电脑物理配置:
CPU:AMD R7 5800
内存:16GB
硬盘:SSD 128GB
显卡:GTX 3060
测试效果:
运行Promethus仿真指点飞行控制示例,Gazebo的帧率能够达到60FPS,如下图所示: 
镜像安装方法
点击开启此虚拟机 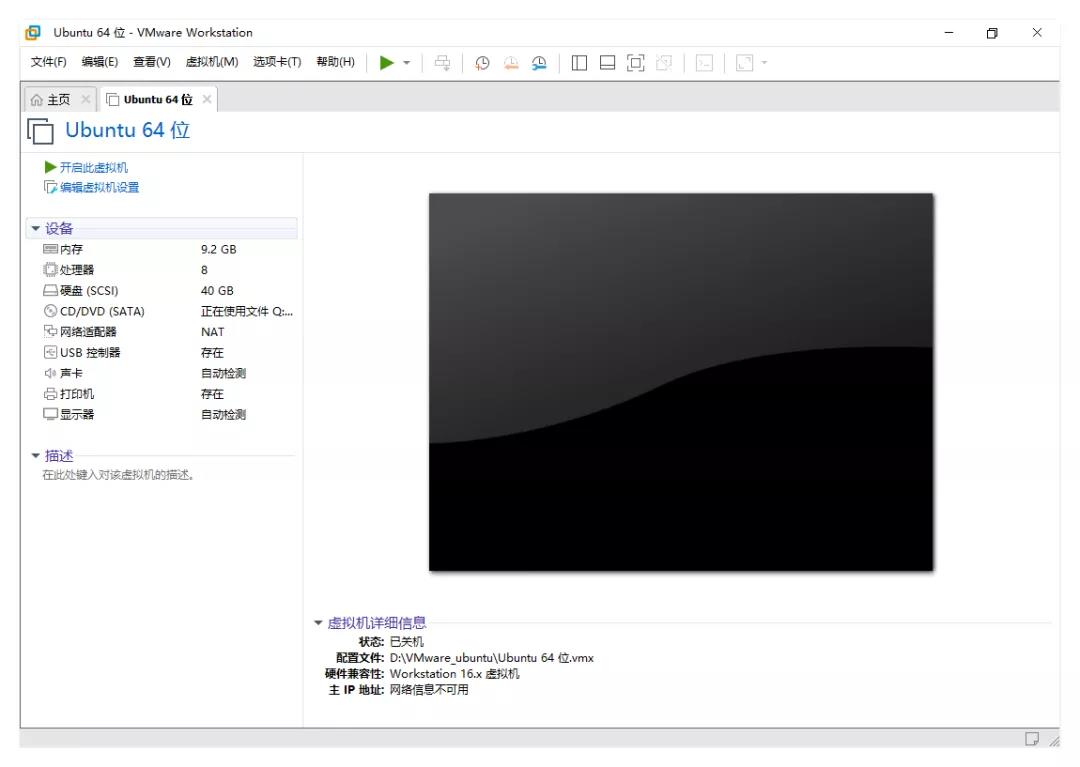
点击Install AMOVOS V2 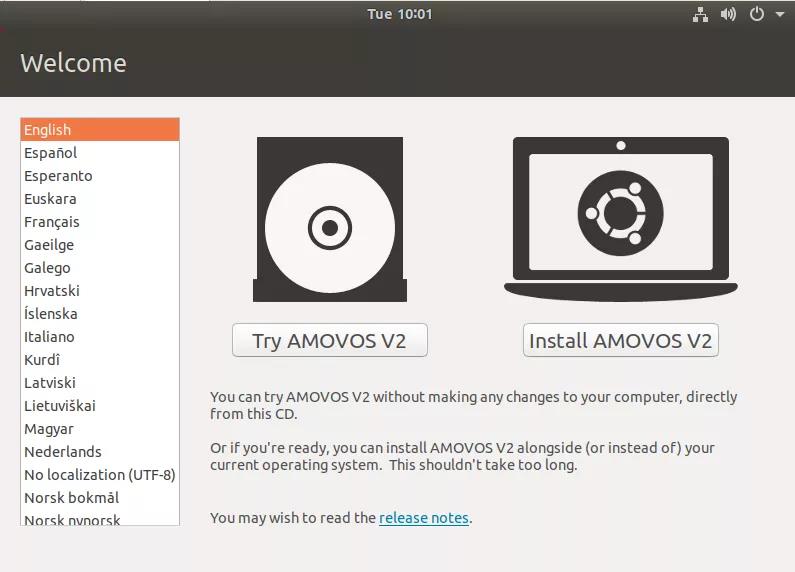
勾选正常安装,如下图所示 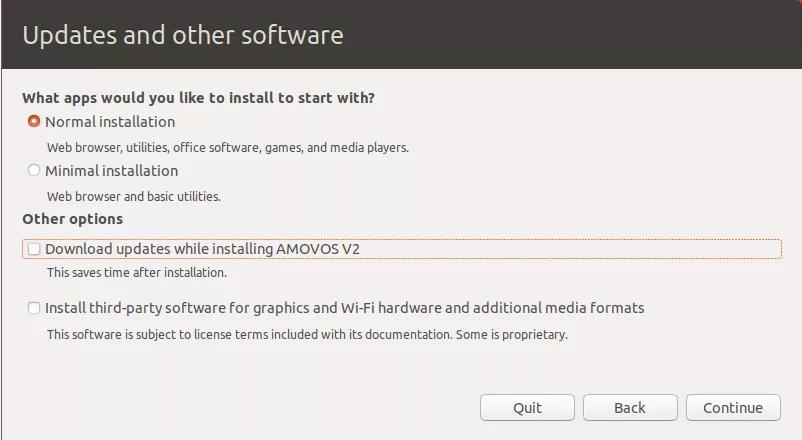
勾选Something else选项,如下图所示 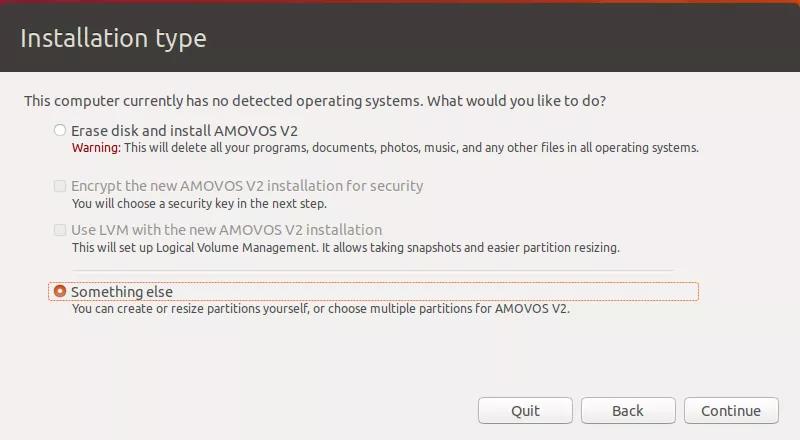
点击New Partition Table 新建分区,如下图所示 
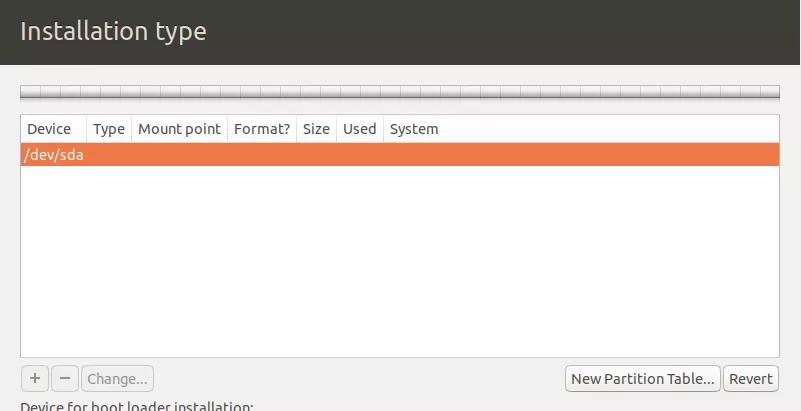
配置分区表,Device for boot loader installation 选项选择/boot挂载点所在的分区/dev/sda1,如下图所示 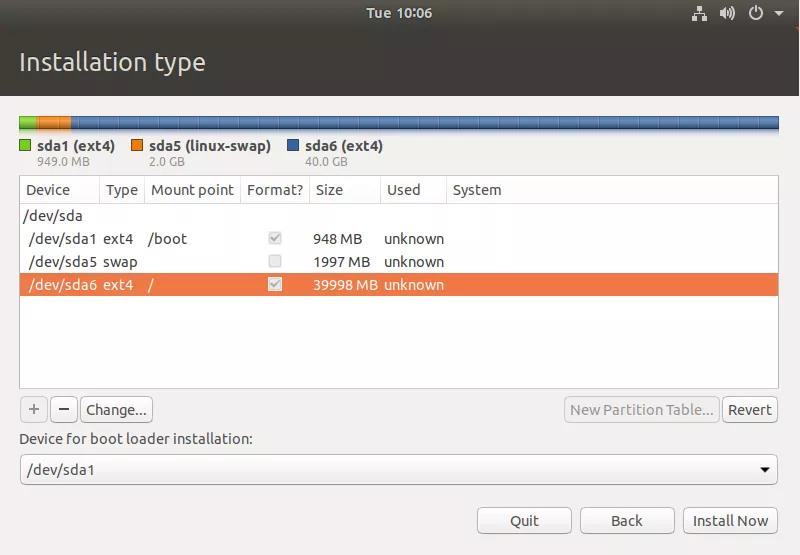
点击Contine按钮,如下图所示 
输入您的账号和密码,如下图所示 
点击Restart Now 按钮,如下图所示 
系统安装完成 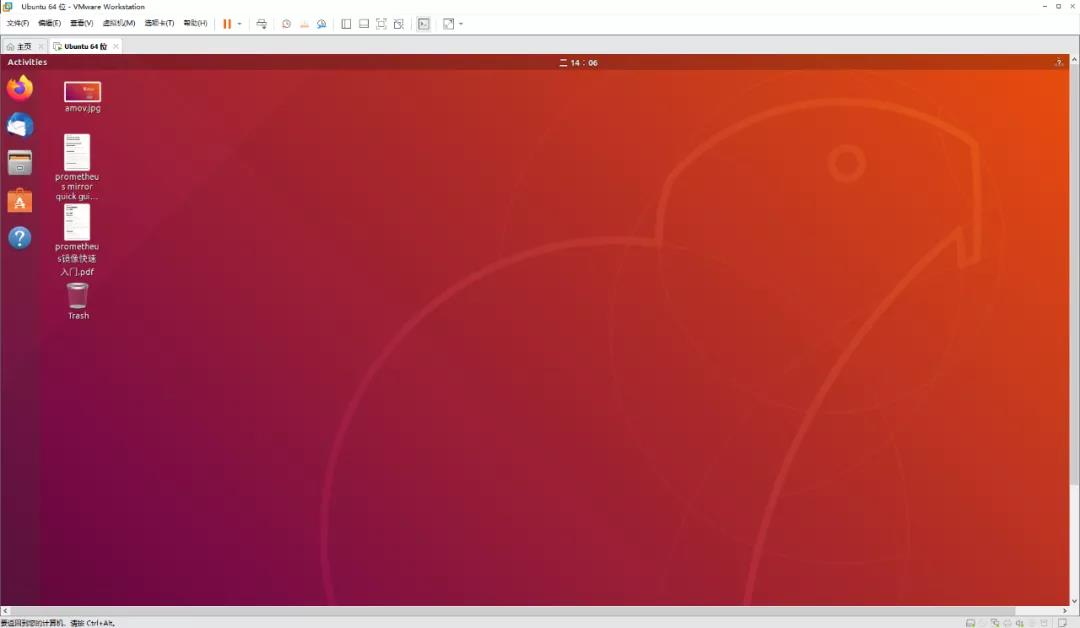
那么问题来了,如何获取Prometheus仿真镜像呢?请前往我们的公众号(阿木实验室),后台回复“Prometheus仿真镜像”,即可前往下载。
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
以上是关于仿真迭代 | 仿真镜像升级,虚拟机也能跑到60FPS,搞ROS机器人开发,你总用得到的主要内容,如果未能解决你的问题,请参考以下文章