opencv基础篇3讲-滤波&直方图均衡化&模板匹配
Posted 文宇肃然
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了opencv基础篇3讲-滤波&直方图均衡化&模板匹配相关的知识,希望对你有一定的参考价值。
滤波
图像基础常识:
噪声
原图与加了高斯噪声后的图片
-
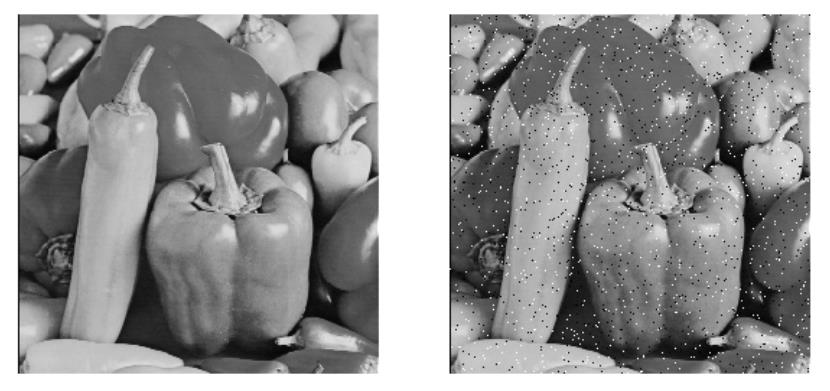
椒盐噪声(Salt & Pepper):含有随机出现的黑白亮度值。(加了胡椒粉,很形象了)
-
盐=白色,椒=黑色
-
-
-
高斯噪声:含有亮度服从高斯或正态分布的噪声。高斯噪声是很多传感器噪声的模型,如摄像机的电子干扰噪声。
-

滤波器
-
线性滤波器
-
线性滤波器的原始数据与滤波结果是一种算术运算,即用加减乘除等运算实现,
-
如均值滤波器(模板内像素灰度值的平均值)、高斯滤波器(高斯加权平均值)等。
-
由于线性滤波器是算术运算,有固定的模板,因此滤波器的转移函数是可以确定并且是唯一的(转移函数即模板的傅里叶变换)。
-
-
非线性滤波
以上是关于opencv基础篇3讲-滤波&直方图均衡化&模板匹配的主要内容,如果未能解决你的问题,请参考以下文章