什么是工业机器人的姿态?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了什么是工业机器人的姿态?相关的知识,希望对你有一定的参考价值。
工业机器人的位姿有两个方面,一个是机器人的末端位置,另一个就是机器人末端姿态。两者统一起来称为机器人位姿。



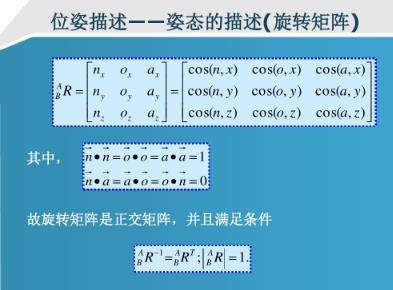
机器人运动学研究时,通常采用矩阵运算形式,所以包括末端关节的各关节空间姿态是向量形式,因此至少需要6个参数表达(n,o,a中的两组),末端关节的姿态在运动学计算时会做为输入参数,表达末端空间姿态的除用向量组形式外还有欧拉角(Euler Angles)、俯仰滚动角(roll-pitch-yaw)(也称横摇角,纵摇角,偏转角)等,这样输入的参数会少些,我知道的广数GSB-RB8就是采用俯仰滚动角输入的,在实际操作中需要一个从向量组到角度的转换;
参考技术A 机器人姿态说的是两个方面,一个是机器人的位置,另一个就是机器人六轴法兰连接的喷枪或者夹具的姿态即旋转角度。统一称为机器人位姿【在实际调试仿形过程中尤为重视机器人的位姿是否合适是至关重要的】编程基础——姿态控制指令《一》

ABB机器人中的PAPID程序,对机器人的姿态控制指令可分为四种,分别是关节插补姿态控制(ConfJ)、直线插补姿态控制(ConfL)、奇异点姿态控制(SingArea)和圆弧插补姿态控制(CirPathMode)。
今天小海与大家一起来学习PAPID程序中,关节插补姿态控制(ConfJ)、直线插补姿态控制(ConfL)的用法和特点。


ertert
关节插补姿态控制指令


关节插补姿态控制指令的格式:
ConfJ [\On] | [\Off];
\On:生效姿态控制,数据类型switch;
\Off:撤销姿态控制,数据类型switch;
系统默认值:ConfJ \On;


ertert
直线插补姿态控制指令的格式:
ConfL [\On] | [\Off];
\On:生效姿态控制,数据类型switch;
\Off:撤销姿态控制,数据类型switch;
系统默认值:ConfL \On;

ertert
当程序通过ConfJ\On、ConfL\On指令生效姿态控制功能时,系统可保证到目标位置的机器人、工具姿态与TCP位置数据robtarget所规定的姿态相同;如果这样的姿态无法实现,程序将在指令执行前自动停止。当程序通过ConfJ\Off、ConfL\Off指令取消姿态控制功能时,如果系统无法保证TCP位置数据robtarget所规定的姿态,将自动选择最接近robtarget数据的姿态执行指令。
指令ConfJ、ConfL所规定的控制姿态,对后续的程序有效,直至利用新的指令重新设定或进行恢复系统默认值(ConfJ\On、ConfL\On)的操作。
PAPID程序中关节插补和直线插补指令的编程实例如下所示:
MODULE MainModuleVAR robtarget pTestPoint1:=[[0,0,0],[1,0,0,0],[1,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];VAR robtarget pTestPoint2:=[[0,0,0],[1,0,0,0],[1,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];VAR robtarget pTestPoint3:=[[0,0,0],[1,0,0,0],[1,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];VAR robtarget pTestPoint4:=[[0,0,0],[1,0,0,0],[1,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PROC main()ConfJ\On;!关节插补姿态控制生效ConfL\On;!直线插补姿态控制生效MoveJ pTestPoint1,v500,fine,tool0;!关节插补运动到pTestPoint1点,并保证实际姿态与系统规划姿态一致MoveL pTestPoint2,v500,fine,tool0;!直线插补运动到pTestPoint2点,并保证实际姿态与系统规划姿态一致ConfJ\Off;!关节插补姿态控制撤销ConfL\Off;!直线插补姿态控制撤销MoveJ pTestPoint3,v500,fine,tool0;!以最接近系统规划姿态的关节插补运动到pTestPoint3点MoveL pTestPoint4,v500,fine,tool0;!以最接近系统规划姿态的直线插补运动到pTestPoint4点ENDPROCENDMODULE

ertert
总 结

关节插补姿态控制指令的格式为:ConfJ [\On] | [\Off],系统默认值:ConfJ \On;
直线插补姿态控制指令的格式为:ConfL [\On] | [\Off],系统默认值:ConfL \On;
指令ConfJ、ConfL所规定的控制姿态,对后续的程序有效,直至利用新的指令重新设定或进行恢复系统默认值。

ertert


有趣的灵魂在等你
长按二维码识别
以上是关于什么是工业机器人的姿态?的主要内容,如果未能解决你的问题,请参考以下文章