[激光原理与应用-43]:《光电检测技术-10》- 激光测距原理方案与案例分析:TOF VL53L0X模块
Posted 文火冰糖的硅基工坊
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[激光原理与应用-43]:《光电检测技术-10》- 激光测距原理方案与案例分析:TOF VL53L0X模块相关的知识,希望对你有一定的参考价值。
目录
第4章 案例分析2:正点原子STM32 VL53L0X激光测距(淘宝)
第1章 激光测距概述
激光,英文名称为Light Amplification by Stimulated Emission of Radiation(简称LASER),意思为原子受激辐射的光,故称激光,激光的产生原理,是原子中的电子吸收能量后从低能级跃迁到高能级,再从高能级回落到低能级的时候,所释放的能量以光子的形式放出,被引诱(激发)出来的光子束(激光)。
激光与普通光源相比,具有单色性、高亮度、方向性等优势,被广泛应用于工业生产和科研实验等各个领域,激光测距便是其中应用较为广泛的一项技术。
1.1 什么是激光测距
激光测距(laser distance measuring)是以激光器作为光源进行测距。
根据激光工作的方式分为连续激光器和脉冲激光器。
氦氖、氩离子、氪镉等气体激光器工作于连续输出状态,用于相位式激光测距;
双异质砷化镓半导体激光器,用于红外测距;
红宝石、钕玻璃等固体激光器,用于脉冲式激光测距。
激光测距仪由于激光的单色性好、方向性强等特点,加上电子线路半导体化集成化,与光电测距仪相比,不仅可以日夜作业、而且能提高测距精度。
1.2 激光测距的特点
激光测距技术是一项非接触式的工业测量技术,与传统的接触式测距技术相比具有以下的特点:
(1)激光测距时,无需与测量表面进行接触,物体的表面不会产生形变
(2)激光测距时被测物体表面不会发生磨损,降低了额外的损失
(3)在很多特殊的环境下,没有条件用常规测量工具接触测量,只能使用激光测距技术
1.3 激光测距仪的形态
(1)手持激光测距仪
测量距离一般在200米内,精度在2mm左右。
这是使用范围最广的激光测距仪。在功能上除能测量距离外,一般还能计算测量物体的体积。
(2)望远镜式激光测距仪
测量距离一般在600-3000米左右,这类测距仪测量距离比较远,但精度相对较低,精度一般在1米左右。
主要应用范围为野外长距离测量。
(3)工业激光测距仪
测量距离在0.5-3000米左右,精度在50mm以内,300米外要加设反光板,部分产品还能在测距的同时测速。
主要应用于位置控制(如车辆和船舶);定位起重机;装卸和搬运设备;飞机测量(测高仪);冶金过程控制;测量不宜接近的物体(如管灌装物、管道、集装箱),以及水位测量。
典型的传感器有LDM301、LDM4x。
1.4 测距的类型
- 一维激光测距仪
- 用于距离测量、定位;
- 二维激光测距仪(Scanning Laser Range finder)
- 用于轮廓测量,定位、区域监控等领域;
- 三维激光测距仪(3D Laser Range finder)
- 用于三维轮廓测量,三维空间定位等领域。
1.5 常见品牌
- 1. 美国图雅得Trueyard
- 2.德国奥尔法ORPHA
- 3.美国博士能BUSHNELL
- 4.加拿大纽康NEWCON
- 5.日本尼康NIKON测距仪
- 6. 德国奥卡OPTI-LOGIC测距仪
- 7.英国真尚有LDM30X测距仪
1.6 应用
世界上第一台激光器,是由美国休斯飞机公司的科学家梅曼于1960年,首先研制成功的。美国军方很快就在此基础上开展了对军用激光装置的研究。1961年,第一台军用激光测距仪通过了美国军方论证试验,对此后激光测距仪很快就进入了实用联合体。
激光测距仪重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学测距仪的五分之一到数百分之一,因而被广泛用于地形测量,战场测量,坦克,飞机,舰艇和火炮对目标的测距,测量云层、飞机、导弹以及人造卫星的高度等。它是提高坦克、飞机、舰艇和火炮精度的重要技术装备。
由于激光测距仪价格不断下调,工业上也逐渐开始使用激光测距仪。
国内外出现了一批新型的具有测距快、体积小、性能可靠等优点的微型测距仪,可以广泛应用于工业测控、矿山、港口等领域。
第2章 测量原理
2.1 测量方法
激光测距是利用激光对目标的距离进行准确测定(又称激光测距)的仪器。
激光测距仪在工作时,向目标射出一束很细的激光,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。
通常精密测距需要全反射棱镜配合,而房屋量测用的测距仪,直接以光滑的墙面反射测量,主要是因为距离比较近,光反射回来的信号强度够大。
与此可以知道,一定要垂直,否则返回信号过于微弱将无法得到精确距离。
通常也是可以的,实际工程中会采用薄塑料板作为反射面以解决漫反射严重的问题。
激光测距仪精度可达到1毫米误差,适合各种高精度测量用途。
2.2 测量方法分类
激光测距目前主要的测量方法有:激光脉冲测距、激光相位测距、激光三角法测距等,不同的测量方法对应不同常用的测量范围和精度。
激光脉冲测距:主要应用于远距离测距,测量距离在km级以上,精度较低,一般是米级精度;
激光相位测距:适用于中长距测量,常用测量范围包括50米、150米、300米、以及500米不等,精度较高,一般是毫米级精度;
激光三角法测距:则一般用于短距离(常见测量范围在2米以内),高精度的测距任务,一般精度能达到微米级,但测量距离较为限制。
2.3 激光测距技术的原理
(1)激光脉冲测距离
激光脉冲测距法工作时,先由激光发射二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号,并将其转化为相应的电信号。通过测量光脉冲往返待测点的时间,乘以光速并除以2,计算出被测目标的距离,计算公式如下:
D=ct/2
D:测量点A、B间的距离,c:光速,t:光脉冲往返AB两点间1次所需时间,
(2)激光相位测距
激光相位测距的原理,是将一低频调制信号对发射激光的光强进行调制, 利用测定“调制光波”往返于被测距离的相位差, 间接求得待测距离D。 其距离的一般计算公式为:
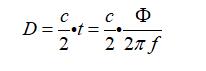
其中,Փ:调制光在距离为 2D 上的相位差, c : 调制光的传播速度, t : 调制光在待测距离往返一次所需要的时间, f : 调制光的频率。
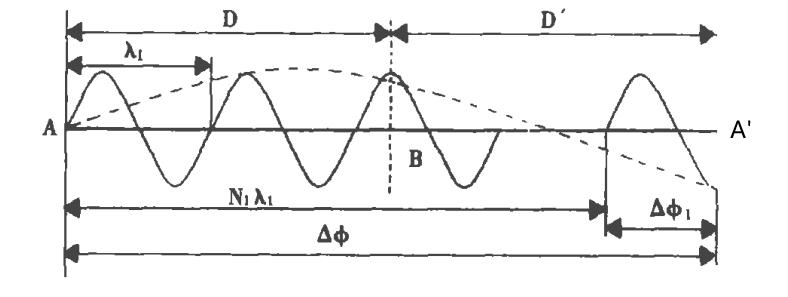
在图 中, A 表示调制光波的发射点, B 表示安置反射器的地点, A′表示所发出的调制光波经反射器反射后的接收地点。AA′两点间的距离即是待测距离D的2倍。 故: Փ =N1 2π+ΔՓ1 , 由于N1并不是一个定值, 所以这可能引起多值解。 为解决这一问题, 我们常采用多个频率的调制信号来测定同一距离。该频率在相位测距中也称为测尺频率,测尺频率的波长称为测尺长度,当被测距离小于测尺长度时, 则不存在多值解,由于测尺长度越大,测量精度就越低,所以出于精度的考虑,我们需要将测尺长度控制在合适的范围内。
(3)激光三角法测距
使一束激光以特定角度照射到待测物体的参考位置上,然后激光在待测物体上会发生散射、漫反射,将光敏传感器件放置在另一特定位置接收经透镜汇聚后的散射光、漫反射光。待测物体发生位移后,再使一束激光以特定角度照射到待测物体的待测位置上,将光敏传感器期间放置在同一特定位置接收此时的散射光、漫反射光,因为待测物体位移前后激光散射漫反射后的光路不同,光敏传感器件上光斑中心位置也不同,将前后两次光斑中心位置代入几何三角关系中,从而计算出物体的位移距离。
第3章 案例分析1:科扬光电
3.1 外观

3.2 性能参数
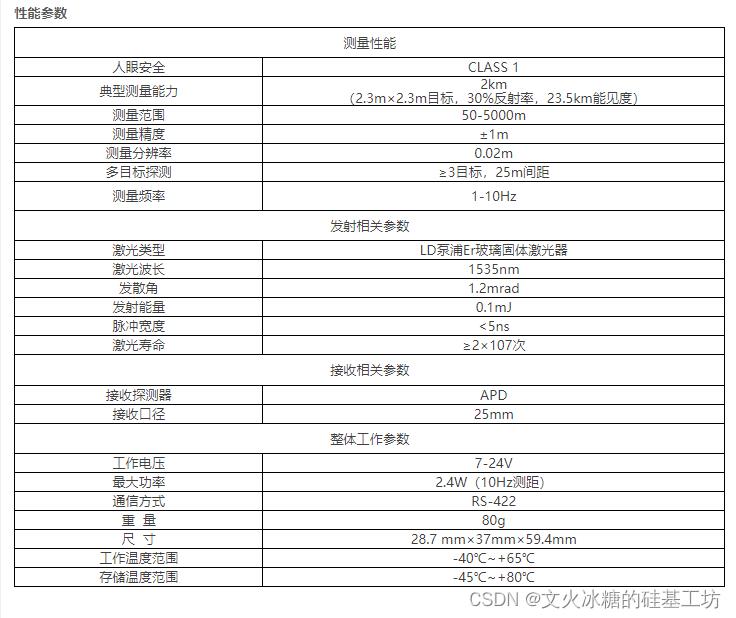
精度:1m,适合远距离测量。
第4章 案例分析2:正点原子STM32 VL53L0X激光测距(淘宝)
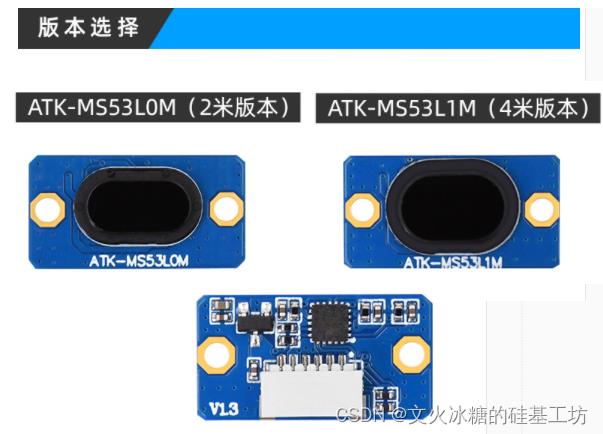
4.1 产品选型
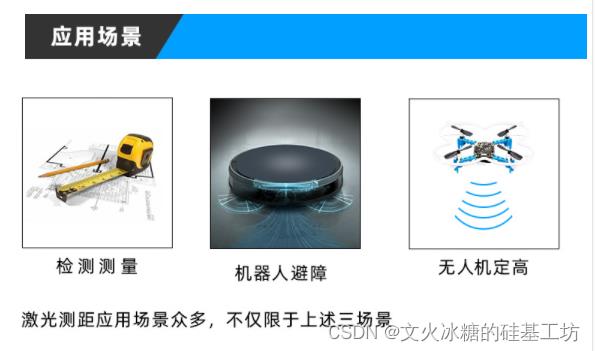
4.2 应用场景
4.3 产品指标
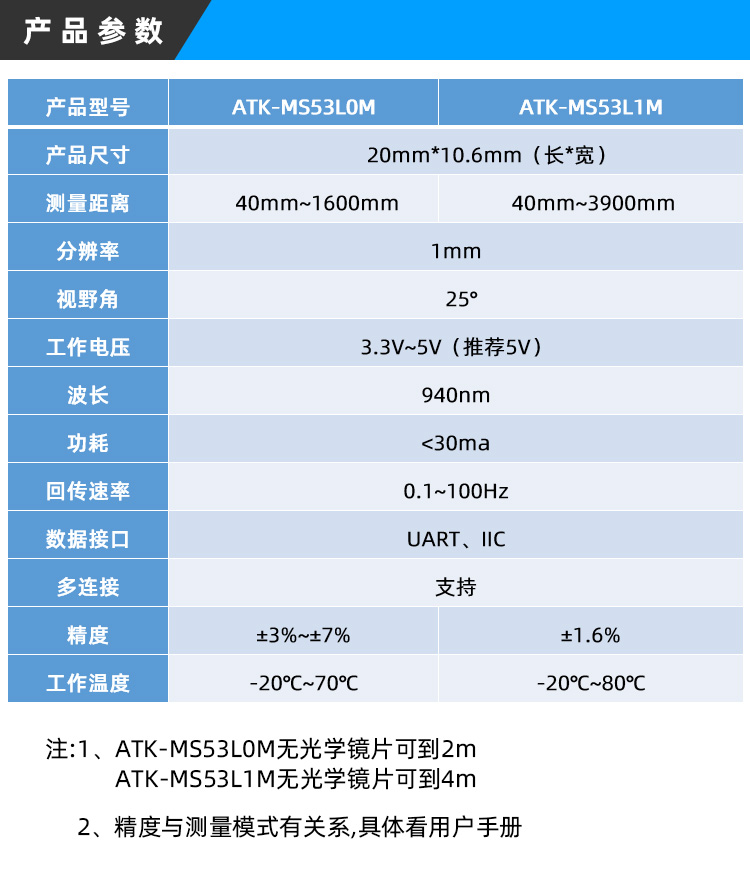
分辨率:1mm
测量精度:1.6% ~ 7%, 如果是1m距离的误差在1.6mm~7mm。
实时性:串口或I2C读,因此是mm级别
代码:嵌入式软件和上位机软件的源代码、
4.4 电路与外部接口
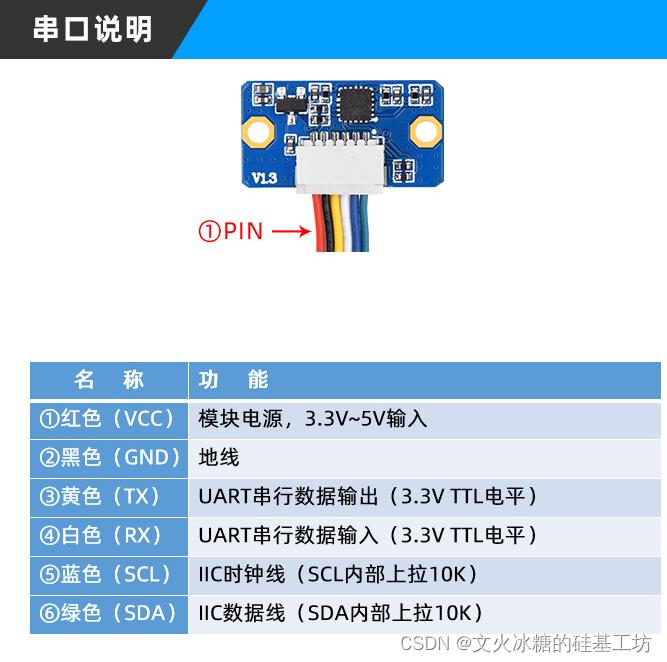
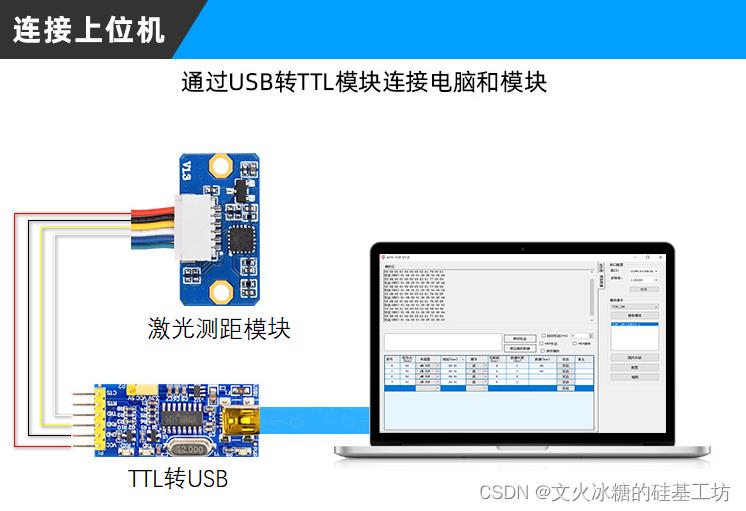
外部主机有两种方法获取距离信息:
- TTL URAT串口
- II2C时钟线
4.5 与上位机连接

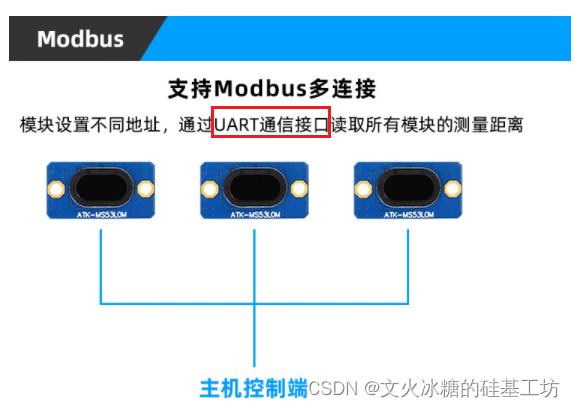
4.6 Modbus支持
4.7 工作原理:
VL53L0X 是 ToF 激光测距传感器,利用飞行时间(ToF)原理,通过光子的飞行来回时间与光速的计算,实现测距应用。
4.8 测量模式
正点原子的STM32F103ZET6精英版。
VL53L0X 传感器提供了 3 种测量模式,单次测量,连续测量,定时测量。
(1) Single ranging(单次测量) ,
在该模式下只触发执行一次测距测量,测量结束后,VL53L0X 传感器会返回待机状态,等待下一次触发。
(2) Continuous ranging(连续测量) ,
在该模式下会以连续的方式执行测距测量。一旦测量结束,下一次测量就会立即启动,用户必须停止测距才能返回到待机状态,最后的一次测量在停止前完成。
(3) Timed ranging(定时测量)
在该模式下会以连续的方式执行测距测量。测量结束后,在用户定义的延迟时间之后,才会启动下一次测量。用户必须停止测距才能返回到待机状态,最后的一次测量在停机前完成。
4.9 测量精度
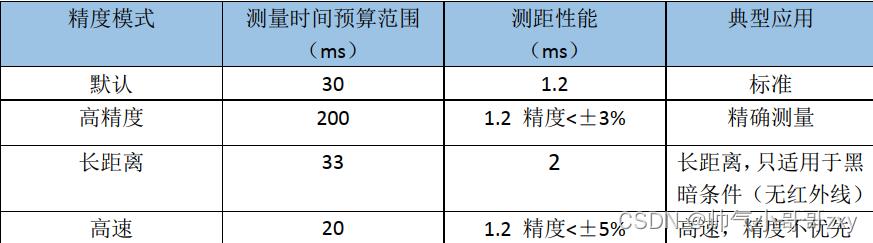
注意:
针对不同的精度模式,测量时间也是有所区别的,测量精度越高,需要的测量时间越长。
(1)测量时间最快为高速模式:只需 20ms 内就可以采样一次,但精度确存在有±5%的误差范围。
(2)长距离精度模式下:测距距离能达到 2m,测量时间在 33ms 内,但测量时需在黑暗条件(无红外线)的环境下。
(3)高精度模式:3%误差,但需要较长的时间200ms。
所以在实际的应用中,需根据当前的要求去选择合适的精度模式,以达到最佳的测量效果。
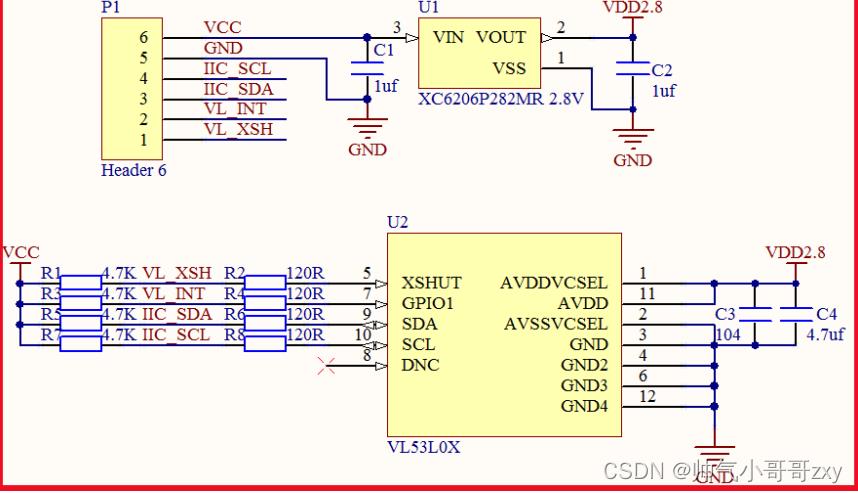
4.10 原理图

它山之石:
激光测距模块_帅气小哥哥zxy的博客-CSDN博客_激光测距模块
激光测距传感器原理与应用介绍_虹科—传感器事业部的博客-CSDN博客_激光测距传感器原理
以上是关于[激光原理与应用-43]:《光电检测技术-10》- 激光测距原理方案与案例分析:TOF VL53L0X模块的主要内容,如果未能解决你的问题,请参考以下文章
[激光原理与应用-36]:《光电检测技术-3》- 光学测量基础 - 光电效应与光电探测器的基本原理
[激光原理与应用-34]:《光电检测技术-1》- 光学测量基础 - 光电检测光学测量作用应用发展趋势
[激光原理与应用-41]:《光电检测技术-8》- 白光干涉仪
[激光原理与应用-39]:《光电检测技术-6》- 光干涉的原理与基础