董绍华:管道焊缝数字图像识别技术与软件系统
Posted 管道保护
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了董绍华:管道焊缝数字图像识别技术与软件系统相关的知识,希望对你有一定的参考价值。
栏目主持人

管道焊缝数字图像识别技术与软件系统
董绍华 孙玄 谢书懿
中国石油大学(北京)
中国石油大学(北京)管道技术与安全研究中心组织管道焊缝缺陷识别专家开发出国内首套管道焊缝数字图像识别软件(Pipeline Welds Image DefectsRecognition and Assessment),该软件系统具有先进的焊缝数字图像识别功能,适用于各类管道焊缝缺陷质量的识别判定,如裂纹、夹渣、气孔、未焊透、未熔合等缺陷,具有较高的识别准确率。采用多项边缘检测方法、检测通道与阈值分割等方法,对管道焊缝数字图像中存在的缺陷进行图像处理,建立了焊缝数字图像缺陷特征数据库,包含灰度差、等效面积(S/C)、圆形度、熵、相关度等参数,建立了多分类器构造(SVM)模型,实现了对管道焊缝数字图像缺陷的分类评价。
1 管道焊缝识别软件概述
目前,管道焊接检测已经普遍使用射线成像技术,计算机智能辅助评片,一定数量的数字图像分析处理系统也投入使用,但评片工作大多需要人工干预,人机交互进行。射线数字图像缺陷识别技术借助计算机的高速处理能力,通过对图像的数字化处理,将人工评片过程转化为图像处理技术,实现对焊缝数字图像缺陷的智能识别。
1.1 图像预处理
图像增强:主要是突出图像中感兴趣部位与背景之间的灰度差,从而能更好地将缺陷区分开来。采用空间域法对图像的灰度系数进行直接处理,对图像的变换系数进行修正,然后通过逆变换获得增强后的图像。
图像去噪:中值滤波是对一个滑动窗口内的诸像素灰度值排序,用中值代替窗口中心像素的原来灰度值,是一种非线性的图像平滑法。具有算法简单、灵活性好,有平滑图像、保存细节的功能。对脉冲干扰及椒盐噪声的抑制效果良好,在抑制随机噪声的同时能有效保护边缘以减少图像模糊。采用大的滤波器窗口可以有效抑制噪声,选用小的滤波器窗口则可以保留图像中重要的结构特征,正确选择窗口尺寸的大小很重要。
1.2 边缘检测
边缘检测处理流程如图 1所示。原始图像经平滑处理后,平滑图像再经一阶或二阶平滑处理,得到梯度或含零点图像,再经阈值处理,确定边界点。边缘即图像中灰度发生急剧变化的区域,可以通过求解一阶导数或二阶导数检测出图像中灰度不连续区域,即边缘区域。二值化之后的图像只存在0和255两种灰度值,通过求取一阶导数最大值便可检测出其边界。
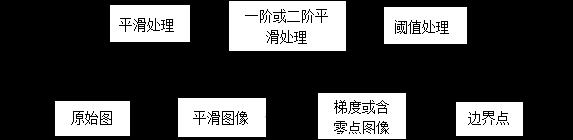
图1 边缘检测处理流程
常用的边缘检测算子中, Robert算子是一种斜向偏差分的梯度算子,梯度大小代表了边缘强度,梯度方向与边缘方向垂直。 Sobel算子是方向算子,从不同方向检测边缘,加强了中心像素上下左右方向像素的权值,对灰度渐变和噪声较多的图像有很好的处理效果。 Prewitt算子是边缘样板算子,利用像素点上下左右临点的灰度差在边缘处达到极值的特点来检测边缘,对噪声也有平滑作用。 Laplacian算子检测时常常产生双像素边界,对图像中的噪声异常敏感,不能检测边缘方向,一般很少直接使用,而将其与Gauss算子结合,形成LOG算子,引入平滑滤波,可有效的去除噪声,边缘检测的效果更好。 Canny算子被认为是信噪比与定位乘积最优逼近算子。它提出:边缘检测时,信噪比越大,将边缘点与噪声点误判的可能性越小;边缘定位精确度越高,检测出来的边缘中心点与实际边缘中心点越相近;保证边缘只存在一个响应,可抑制虚假响应的发生。
上述算子检测中存在的问题是,图像往往是区域的黑度分布,呈现条状区域布置,边界检测中出现边界不清晰的情况。通过对不同边缘检测算法进行对比分析,考虑了结构元素的大小和方向影响形态学边缘检测计算结果,提出了一种多算子融合处理技术,即将Sobel算子、 Prewitt算子、 Robert算子融合处理,检测出管道焊缝边缘,并最大限度的优化边缘噪声影响,为图像边缘检测分析提供一种行之有效的方法。
1.3 特征提取
提取焊缝缺陷的纹理特征和参数特征,所有的灰度共生矩阵使用G (i , j )来表示。
(1)能量(angular second moment):该参数表示的是图像中纹理的精细程度以及灰度分布是否均匀。当元素分布比较集中时, ASM 的值会比较大,表示纹理比较均匀并且规则。

(2)惯性矩(contrast):该参数表征的是图像的清晰程度以及纹理沟纹的深浅,沟纹深,则该参数值大,并且直观看起来越清晰,同理,当对比度比较小时,沟纹比较浅且看起来模糊。在灰度共生矩阵中,离对角线越大, CON 的值越大。

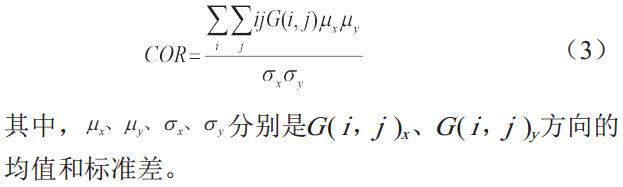
(3)相关度(Correlativity):该参数表示的是矩阵元素在行列上的相似程度,由此可知,相关值的大小确切地表征了图像中局部灰度相关性。当灰度共生矩阵中各个元素值比较均匀时,相关值就大,反之亦然。若图像中有水平方向纹理,则水平方向矩阵的COR 大于其余矩阵的COR 值。
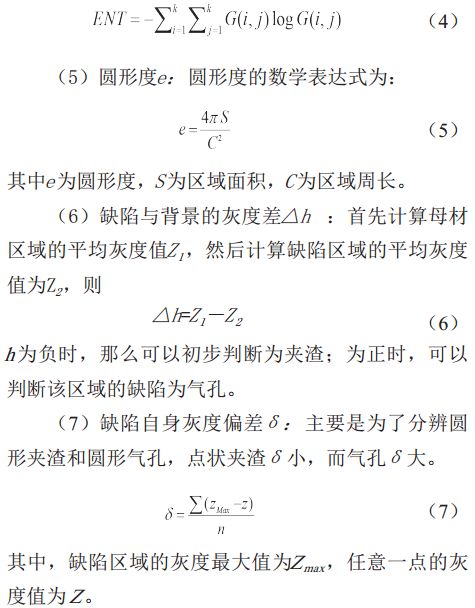
(4)熵(entropy):该参数表示的是某个图像的信息量,由于纹理信息是图像信息的一部分,并且它是一个随机性的度量,因此,当共生矩阵中的元素随机性比较大、并且该矩阵的空间共生矩阵中的元素的值基本相等时,熵较大。该特征参数表征的是图像中纹理的非均匀程度或者说复杂程度。
(8)缺陷的相对位置d: 该参数是计算缺陷的中心位置,然后得出该位置到焊缝中心的距离,一般用归一化之后的值来衡量这个位置,用来识别未焊透和未熔合缺陷。
(9)等效面积 S/C: 反映缺陷的单位边界长度所占有的面积大小, S/C 越小,表明缺陷是曲折细长的。一般用来表征裂纹。等效面积主要指的是特征区域面积和特征区域周长的比值大小。
1.4 CLTP
焊缝纹理特征提取涉及边界清晰度、局部信息细化程度,传统方法使用二值法LTP、 LBP、 CLBP 纹理特征描述方法,但纹理描述的精度受到影响,因此,提出了完全局部三值CLTP模式,包含3 种核心算子,即中心描述子、符号描述子和大小描述子,分别用CLTP_C ,CLTP_S , CLTP_M 表示,将算子转化后,最终得到修正的CLTP_C *、 CLTP_S * 、 CLTP_M *。计算过程如下:
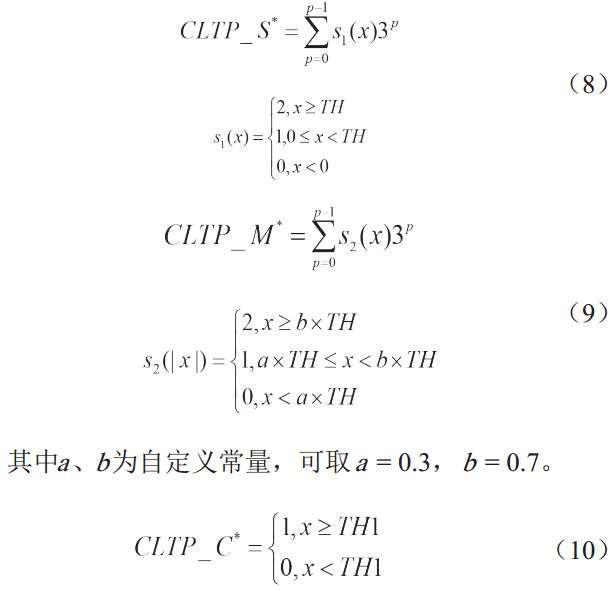
TH1 为图像像素均值,然后用 模式分别转化编码值, CLTP_C *, CLTP_S * , CLTP_M *分别对应。
图 2(a)表示中心像素为38 的3×3样本块,邻域的8个像素为[27,72,69,32,25,43,26,88];图 2(b)中 abs即绝对值, TH =24 为求得的阈值,计算局部差值,得到的算子结果为[-11, 34, 31, -6, -13, 5, -12,50];图 2(c)中, CLTP_S * 局 部 差 值 符 号 的 三 值编 码 向 量 为[0, 2, 2, 0, 0, 1, 0, 2];图 2(d)中, CLTP_M *算子值为[1,2,2,0,1,0,1,2];图 2(e)中,TH1=47.75 由[27,72,69,32,25,43,26,88]计算的CLTP_C * 平均值,表示CLTP 的 值为[01100101]。
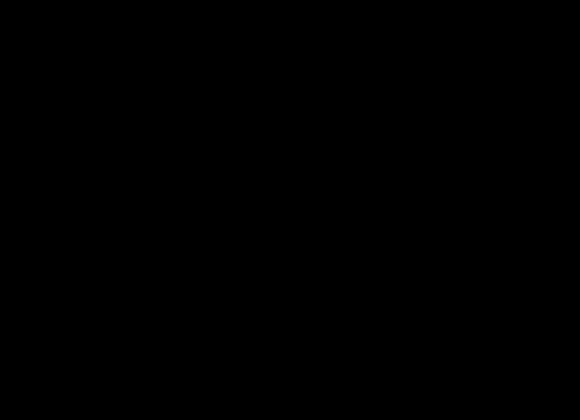
1.5 多类支持向量机SVM模型
可使用单个类与剩下的类构造M-SVM分类器,确定这个分类器的判断标准,对所有的类别重复以上的过程,求出每个判断函数的值,将这些数值进行对比,最大的类别即为样本的最好分类结构。在该方法中,需要构造M个分类器,使用直接全局优化方法(M-SVM),构造多批分类器,对 M 个分类器的求解一次性完成。
设:
1.6 SVM多分类器构造
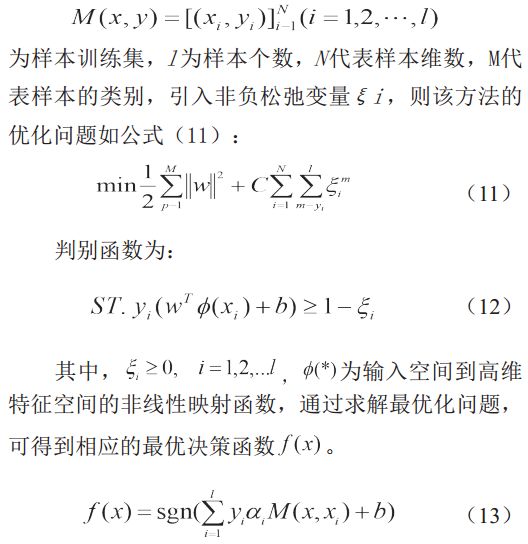
分类器构造应优先采用类别差异性排除法,即在整体结构中,先将相似量作为一类,然后根据相似量之间的细微变化,再通过模型算法进行区分。这种分类在分类准确率和平衡准确率上都有极高的效率。本文构造了6种缺陷,裂纹、圆形夹渣、条形夹渣、气孔、未焊透、未熔合等典型缺陷SVM多类分类器(图 3)。
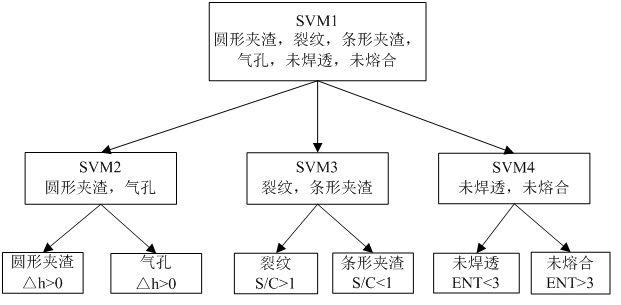
图 3 焊缝缺陷SVM分类识别
2 软件模块和功能特点
2.1 软件模块
包括焊片信息输入、焊缝数字图像数据库、图像亮度对比处理、图像保存、图像像素尺寸识别、边缘检测、阈值分析、色阶处理、图像执行变换、黑白像素统计、反相处理、焊缝数字图像处理等模块。
2.2 数据分析系统(图 4)
图 4 数据分析系统
2.3 焊缝数字图像缺陷特征数据库
经开展管道焊缝缺陷类型分析识别和评价分类,建立了覆盖各种缺陷类型的焊缝数字图像缺陷特征数据库,包含灰度差、等效面积(S/C )、圆形度、熵、相关度等参数,建立了多分类器构造(SVM)模型,实现了对管道焊缝数字图像缺陷的分类评价。信息要素包括管线名称、管线外径、管线起点、管线终点、投产日期、管道焊片所在管桩号位置、焊片编号、评价工程师、评价日期等。方便焊缝缺陷数字图像的数据信息整理,保证管道信息的可靠性和准确性。
2.4 软件功能
主要功能包括焊缝缺陷类型、焊缝数字图像缺陷自动查找、焊缝缺陷类别分析、焊缝数字图像缺陷数据库、图像对比分析、校核评价、写入数字图像数据库、报告输出。
2.5 校核评价
根据管道焊缝缺陷类型进行分类校核评价(图 5)。在已知参数存在的情况下,评价焊缝数据的准确性,根据缺陷类型标准API-1104等进行人工经验性校核。
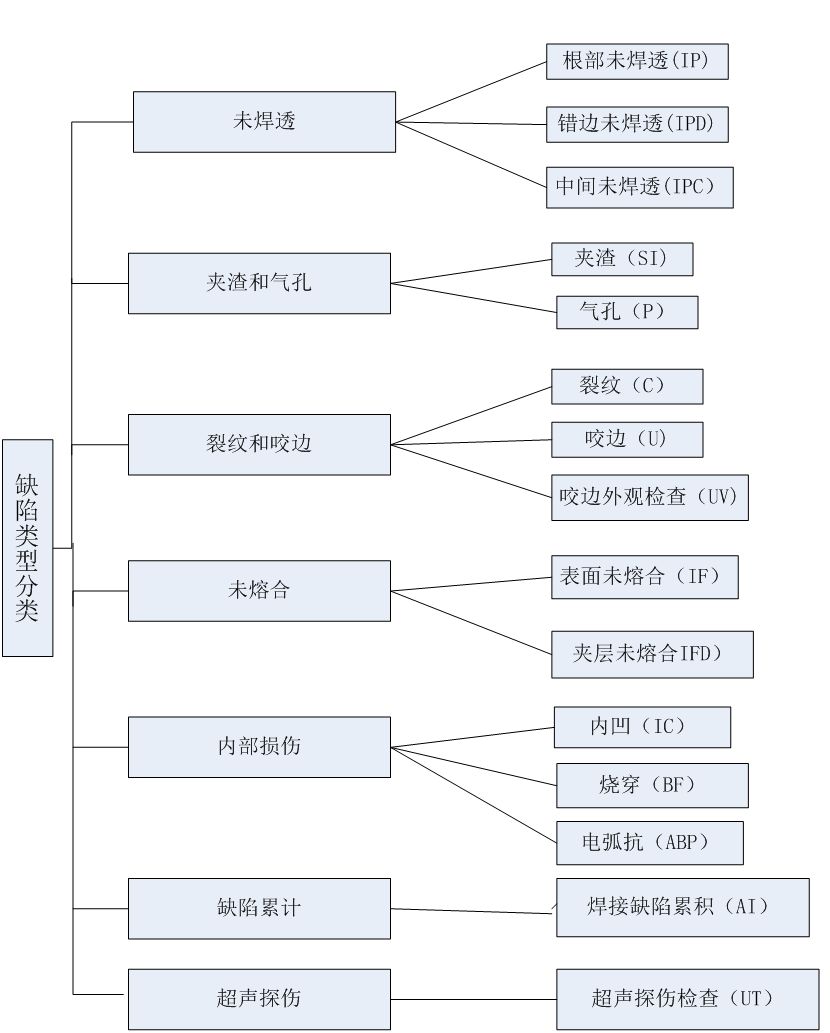
图 5 焊缝缺陷类型
2.6 软件特点
(1)评价报告的自动输出
软件最终能自动输出关于管道焊缝缺陷的有效评价报告,给出评价中的图像分析过程,缺陷类型、缺陷参数的评价过程,评价报告结论等,方便评价人员编制报告使用。
(2)入门操作简单
软件入门操作简单,适用于自学,且无需操作人员了解焊缝缺陷特征及分类专业知识,即可进行管道焊缝缺陷的评价,方便操作和使用。
3 实验研究
采用上述模型,首先对焊缝数字图像进行完全局部三值模式CLTP纹理识别,采用缺陷边缘检测和跟踪处理技术计算各参数。上述纹理识别和特征识别计算参数包括:图像长度像素、图像宽度像素、缺陷与背景的灰度差△h 、缺陷的相对位置d 、缺陷自身灰度偏差δ 、缺陷长宽比、等效面积 S/C 、圆形度e 、熵ENT 、相关度COR 、惯性矩CON 、能量参数等,所有特征参数输入到SVM模型,进行SVM 焊接数字图像的缺陷识别,最终得到缺陷类别(图 6)。
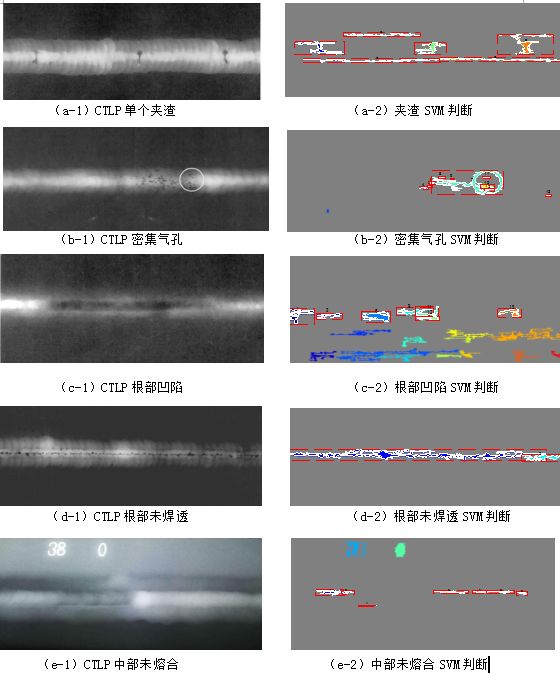
图 6 焊缝数字图像缺陷CTLP识别和SVM缺陷判断
焊缝数字图像经过完全局部三值模式CLTP纹理识别后,应用SVM数据分类技术, CTLP模式使焊接数字图像边缘检测和缺陷跟踪识别精度大大提高, SVM缺陷分类模型使图像缺陷的自动识别准确度大大提高,基本达到了工业应用级水平。图 6(e)是中国西气东输管道7·28事故段焊口X-射线数字图像,在位置点38左下方显示未熔合特征,其计算机系统判别与人工评片结果完全一致。验证了该方法具有较好的精度。
4 结论
(1)图像处理后没有噪声的情况下, Canny算子、 Log算子、 Robert算子、 Sobel算子、 Prewitt算子可以得到很好的边缘检测结果。当处理后仍然存在噪声时,检测结果出现了较多的伪边缘,选用自动选取阈值方法进行图像边缘检测,能够取得比较合理的阈值。
(2)建立的焊缝数字图像缺陷特征数据库,包含形状特征和纹理特征,图像长度像素、图像宽度像素、缺陷与背景的灰度差△h、缺陷的相对位置d、缺陷自身灰度偏差δ、缺陷长宽比、等效面积 S/C、圆形度e、熵ENT、相关度COR、惯性矩CON、能量等参数。
(3)建立了SVM分类模型,基于缺陷特征数据库,分类获取了缺陷形状特征,找出裂纹、夹渣、气孔、未焊透、未熔合等缺陷特征。
(4)管道焊缝缺陷识别评价软件实现了对管道焊缝数字图像缺陷的自动识别和自动化评价,这对于建设数字化管道有积极的推进作用,同时对保障管道安全运行有重要意义。
来源:《管道保护》2018年第3期(总第40期)

给个再走吧
以上是关于董绍华:管道焊缝数字图像识别技术与软件系统的主要内容,如果未能解决你的问题,请参考以下文章
Java 图像识别 数字图像处理 从一张JPG图片中识别出若干黑色小方块