六轴姿态及rollpitch和yaw
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了六轴姿态及rollpitch和yaw相关的知识,希望对你有一定的参考价值。
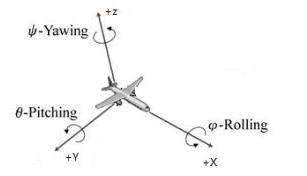
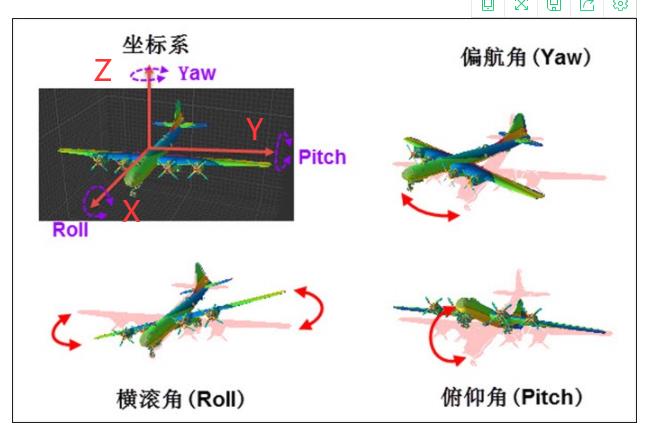
三个角,偏航角(Yaw),横滚角(Roll),俯仰角(Pitch)。
pitch、yaw、roll三个角如下图所示:
(1)翻滚角roll是围绕x轴旋转。
(2)俯仰角pitch是围绕y轴的旋转,可视为飞机的上下俯仰。
(3)偏航角yaw是围绕z轴旋转,可视为控制飞机的偏航。
关于这三个角的解释,更详细的可以查看
在 https://blog.csdn.net/yuzhongchun/article/details/22749521 中有更详细的解释。
以上是关于六轴姿态及rollpitch和yaw的主要内容,如果未能解决你的问题,请参考以下文章