惯性测量传感器的啥六轴,九轴指的是啥
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了惯性测量传感器的啥六轴,九轴指的是啥相关的知识,希望对你有一定的参考价值。
参考技术A六轴包括三轴陀螺仪和三轴加速传感器九轴惯性测量传感器包括三轴陀螺仪,三轴加速传感器,三轴磁感应传感器。
惯性传感器是一种传感器,主要是检测和测量加速度、倾斜、冲击、振动、旋转和多自由度(DoF)运动,是解决导航、定向和运动载体控制的重要部件。
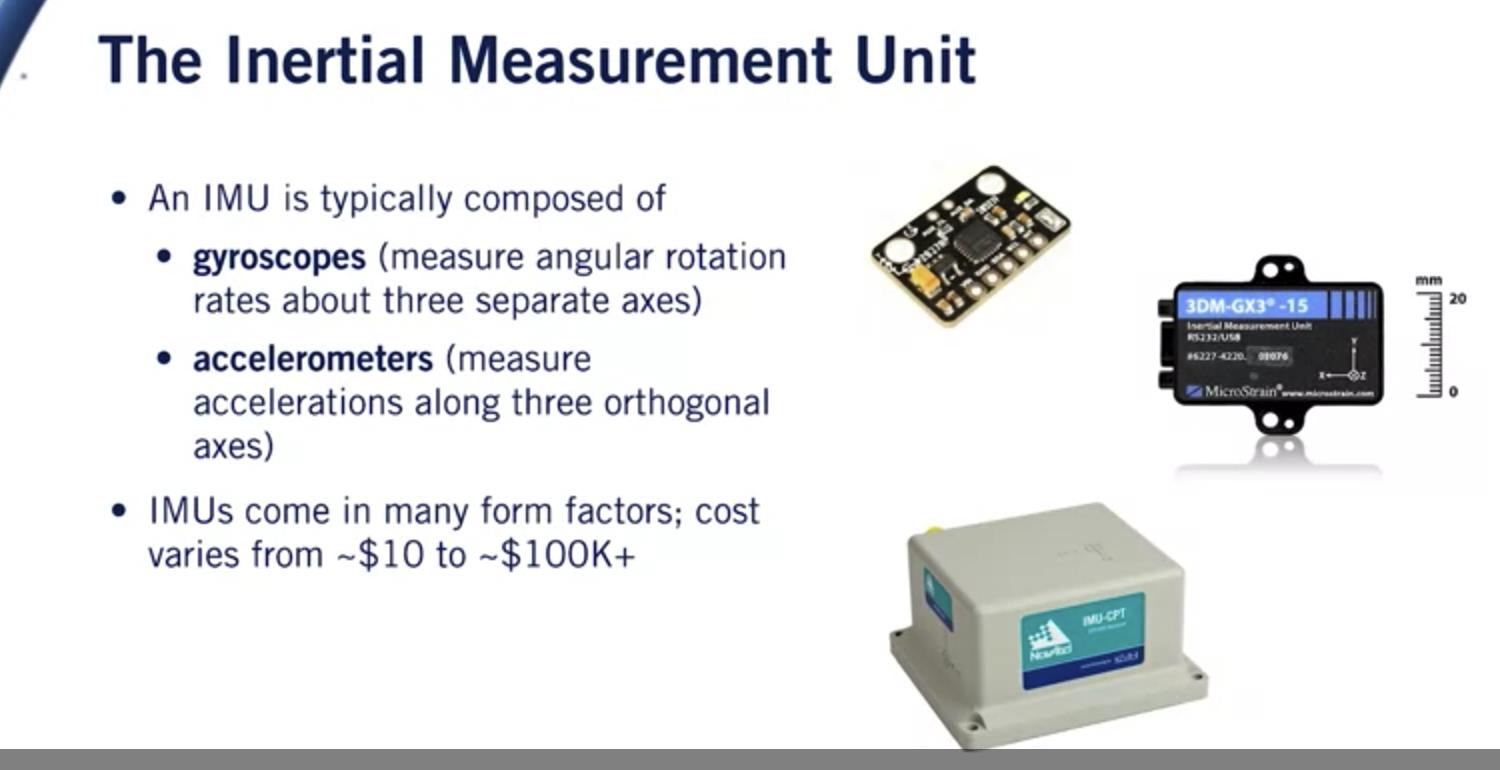
惯性传感器包括加速度计(或加速度传感计)和角速度传感器(陀螺)以及它们的单、双、三轴组合IMU(惯性测量单元),AHRS(包括磁传感器的姿态参考系统)。
MEMS加速度计是利用传感质量的惯性力测量的传感器,通常由标准质量块(传感元件)和检测电路组成。IMU主要由三个MEMS加速度传感器及三个陀螺和解算电路组成。
扩展资料
低精度MEMS惯性传感器作为消费电子类产品主要用在手机、GPS导航、游戏机、数码相机、音乐播放器、无线鼠标、PD、硬盘保护器、智能玩具、计步器、防盗系统。由于具有加速度测量、倾斜测量、振动测量甚至转动测量等基本测量功能,有待挖掘的消费电子应用会不断出现。
中级MEMS惯性传感器作为工业级及汽车级产品,则主要用于汽车电子稳定系统(ESP或ESC)GPS辅助导航系统,汽车安全气囊、车辆姿态测量、精密农业、工业自动化、大型医疗设备、机器人、仪器仪表、工程机械等。
高精度的MEMS惯性传感器作为军用级和宇航级产品,主要要求高精度、全温区、抗冲击等指数。主要用于通讯卫星无线、导弹导引头、光学瞄准系统等稳定性应用;飞机/导弹飞行控制、姿态控制、偏航阻尼等控制应用、以及中程导弹制导、惯性GP战场机器人等。
参考资料:百度百科-惯性传感器
自动驾驶 10-2: 惯性测量单元 (IMU)The Inertial Measurement Unit (IMU)
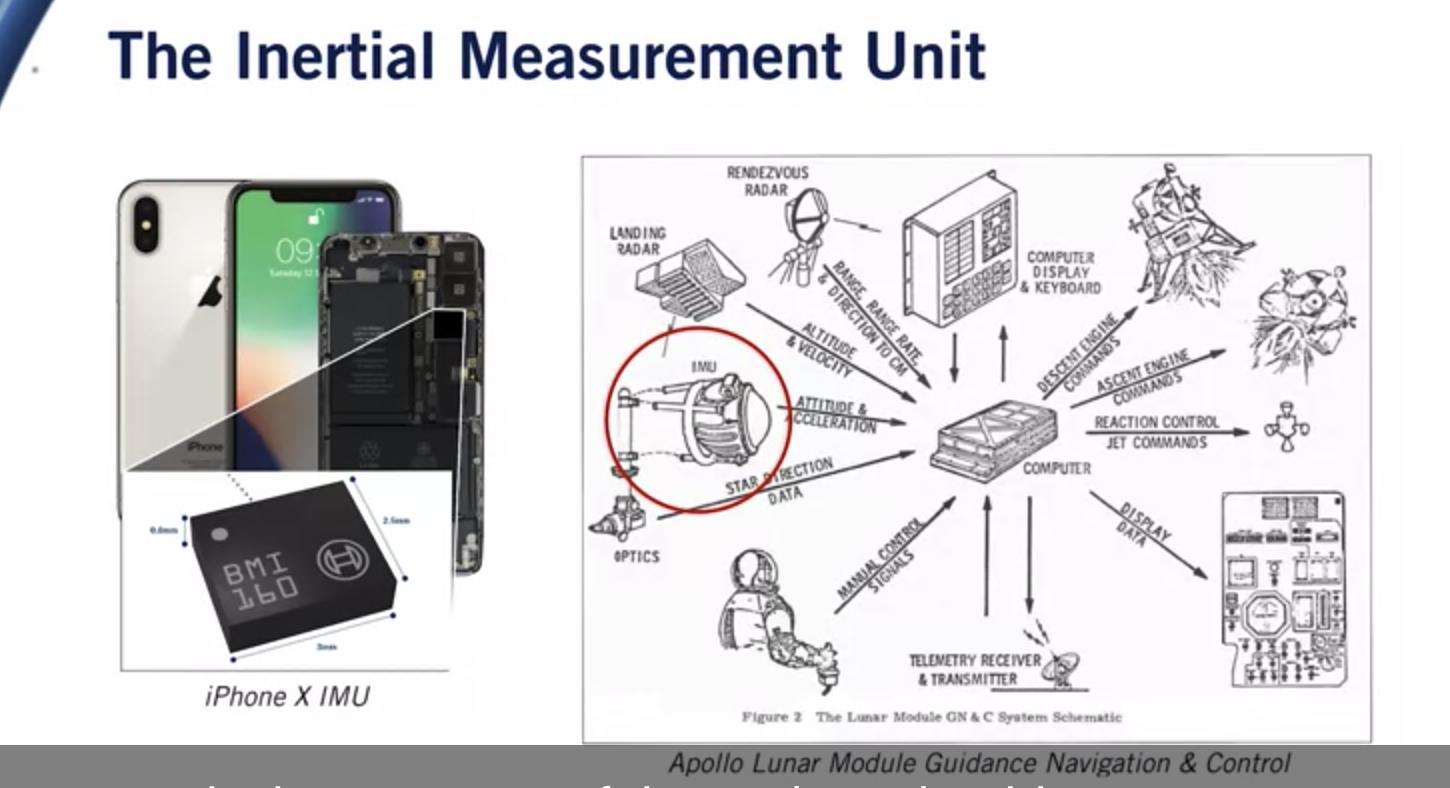

在本课中,我们将讨论惯性测量单元或 IMU。 在本课结束时,您将能够描述 构成基本 IMU 的两个传感器,一个加速度计和一个陀螺仪。 您还可以对这些传感器中的每一个进行建模,并考虑 诸如传感器噪声和偏差之类的东西。 当我们将 IMU 合并到全状态估计器中时,这将是至关重要的。 让我们开始。 惯性测量单元,或 IMU 测量物体在惯性空间中的运动。 今天,某种廉价的、大规模生产的 IMU, 几乎在所有智能手机中都可以找到,例如图中的 iPhone X。 IMU 经常用于任务,包括用于健康跟踪的计步、 最近作为增强现实设备。
尽管它们在今天无处不在, 开发可以准确跟踪运动的传感器 移动身体的研究是 20 世纪的一项重大成就。 早在 GPS 之前,IMU 就为越洋飞行提供了帮助,并且对阿波罗号至关重要 任务作为机载引导、导航和控制系统的一部分。 阿波罗飞船依靠 IMU 来准确跟踪两个位置, 以及在漫长的月球航行中车辆的方向。 在太空中,几乎没有什么地标可以用来指导。 可以跟踪固定恒星,但这并不容易。 无需操作的机载 IMU 这样的地标使安全导航到月球表面成为可能。 在现代自动驾驶汽车中,IMU 扮演着非常相似的角色。 在其他传感器提供导航信息时填写 要么不可用,要么不可靠。 那么什么是 IMU? 嗯,一般来说,惯性测量单元是一个复合传感器套件 它结合了三个陀螺仪和 三个加速度计来跟踪刚体的外部自由运动。 一些 IMU 还包含磁力计或指南针,以帮助跟踪方向。 IMU 有多种形状和形式。 现代智能手机中的传感器相对便宜, 批量购买时,价格通常不到几美元。 它们重量轻,需要的功率相对较小,但 产生相当嘈杂的测量结果。 更昂贵的 IMU 使用更复杂的组件并具有更准确的 可以消除温度波动影响的校准模型,对于 例子。
让我们讨论 IMU 的组件。 陀螺仪和加速度计更详细。
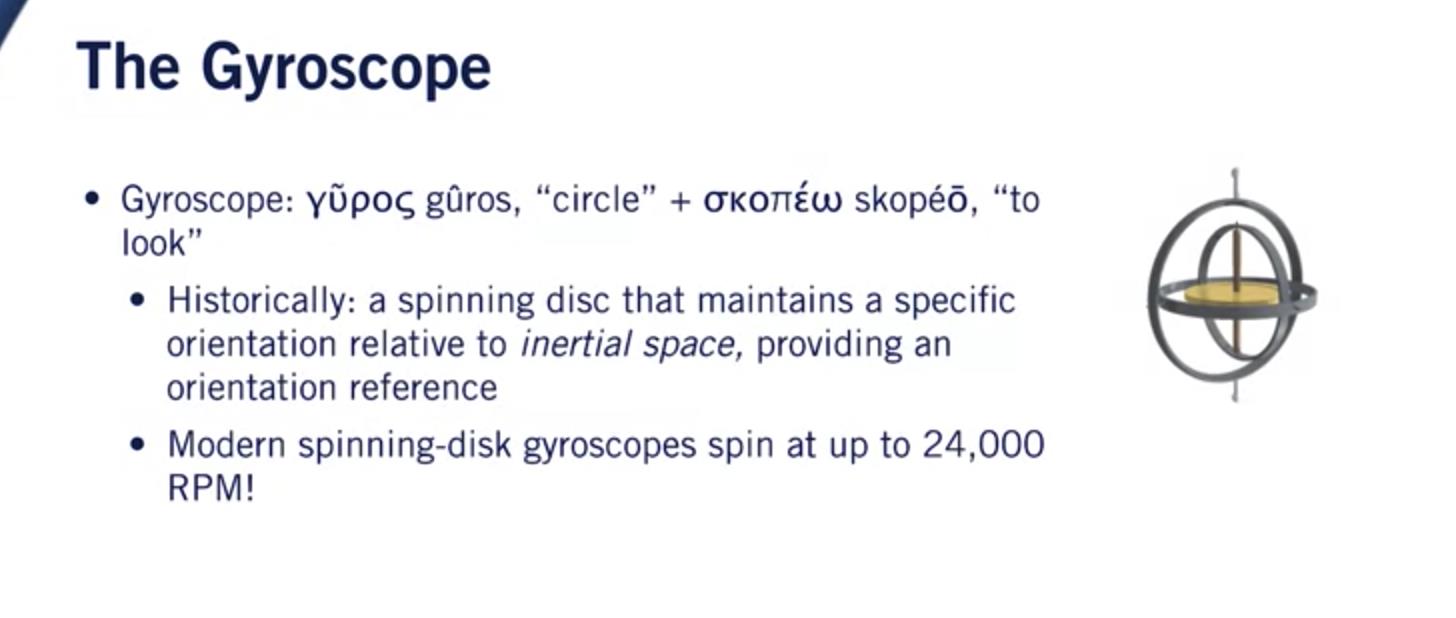
陀螺仪的历史悠久。 陀螺仪这个术语可能会让人很困惑,因为它指的是几个概念 所有这些都与测量方向或方向变化的想法有关。 这个词本身来自希腊词 Guros,意思是圆圈,而 skopeo,意思是看。 历史上,陀螺仪是一个旋转的圆盘,由于它的 角动量抵抗方向的变化。 在 19 世纪末和 20 世纪初,工程师们意识到这 纺车可用作海洋和 航空导航。 这需要精确的加工,而不是万向节, 它使用高品质的宝石或数字轴承。
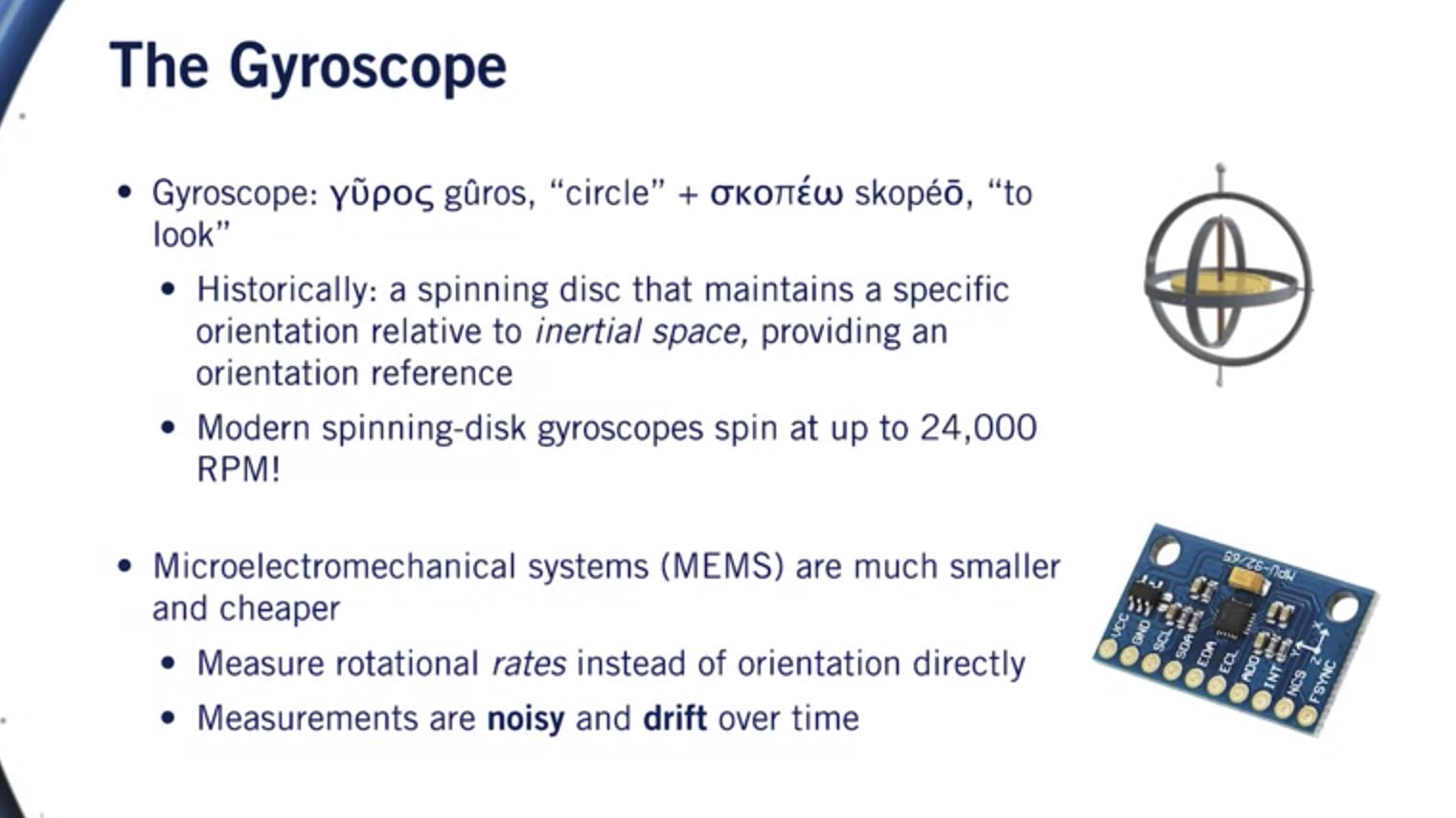
虽然这种旋转盘陀螺可以很准确, 它非常重、体积大,而且制造成本通常非常高。 尽管如此,它仍在使用航空和 在弹道应用中,可以将其旋转至 24,000 RPM。 在现代陀螺仪中,旋转轮通常由 由一个小的硅音叉组成的微机电系统 根据施加的旋转改变其共振特性或 方向变化。
这些传感器要便宜得多,并且可以装入很小的包装中。 然而,它们会产生嘈杂的测量结果,并且 对基于温度的波动敏感。
更重要的是,它们测量旋转速率,而不是直接测量方向,所以 输出信号必须进行数值积分以确定方向 改变。 此过程可能会在最终方向中引入额外的误差 估计。
自动驾驶汽车工程师应该意识到需要考虑 漂移和性能随温度变化等问题引入 传感器建模过程中增加了大量额外的复杂性。 人们通常会认为旋转机械装置不如 硅组件,但情况并非总是如此。
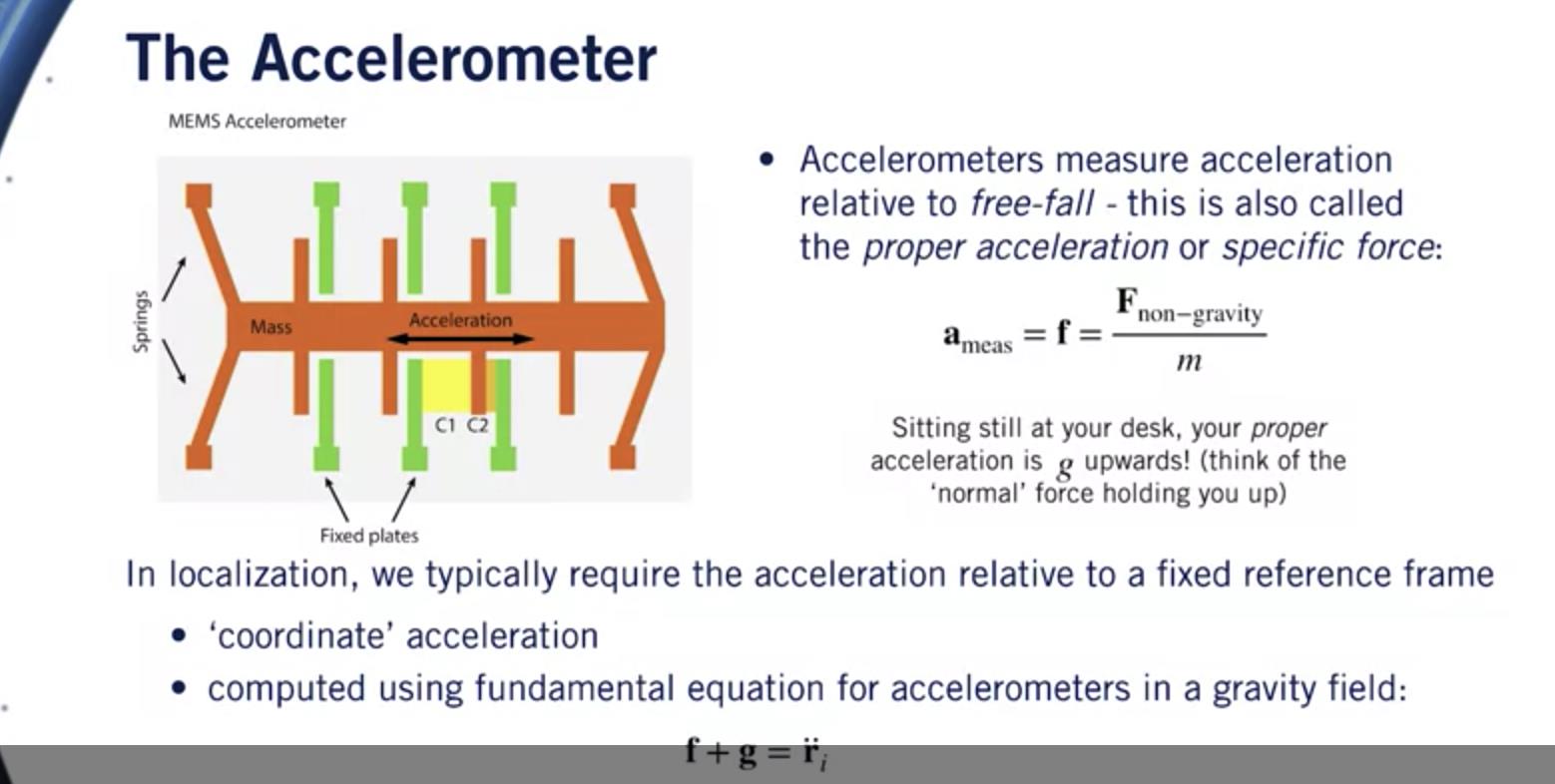
加速度计测量沿单个轴的加速度。 更便宜的基于 MEMS 的加速度计使用微型悬臂梁 附在它上面的一个证明质量。 当传感器加速时,光束偏转。 例如,可以通过电容电路测量这种偏转,并且 转换为加速度值。 更昂贵的传感器也可能使用压电材料。
重要的是要注意加速度计测量 什么叫做适当的加速度,或特定的力。 这是每单位质量的总非重力。 正确的加速度是相对于 自由落体的参考系。 当你坐在椅子上,相对于地面静止时, 您感觉到的适当加速度将是重力的值 在您的位置加速,但向上。 另一种说法是,作用在你身上的唯一非引力, 法向力,必须等于重力。
然而,当然,为了导航目的, 我们通常不关心我们适当的加速度。 我们关心的是相对于某个固定参考系的加速度。
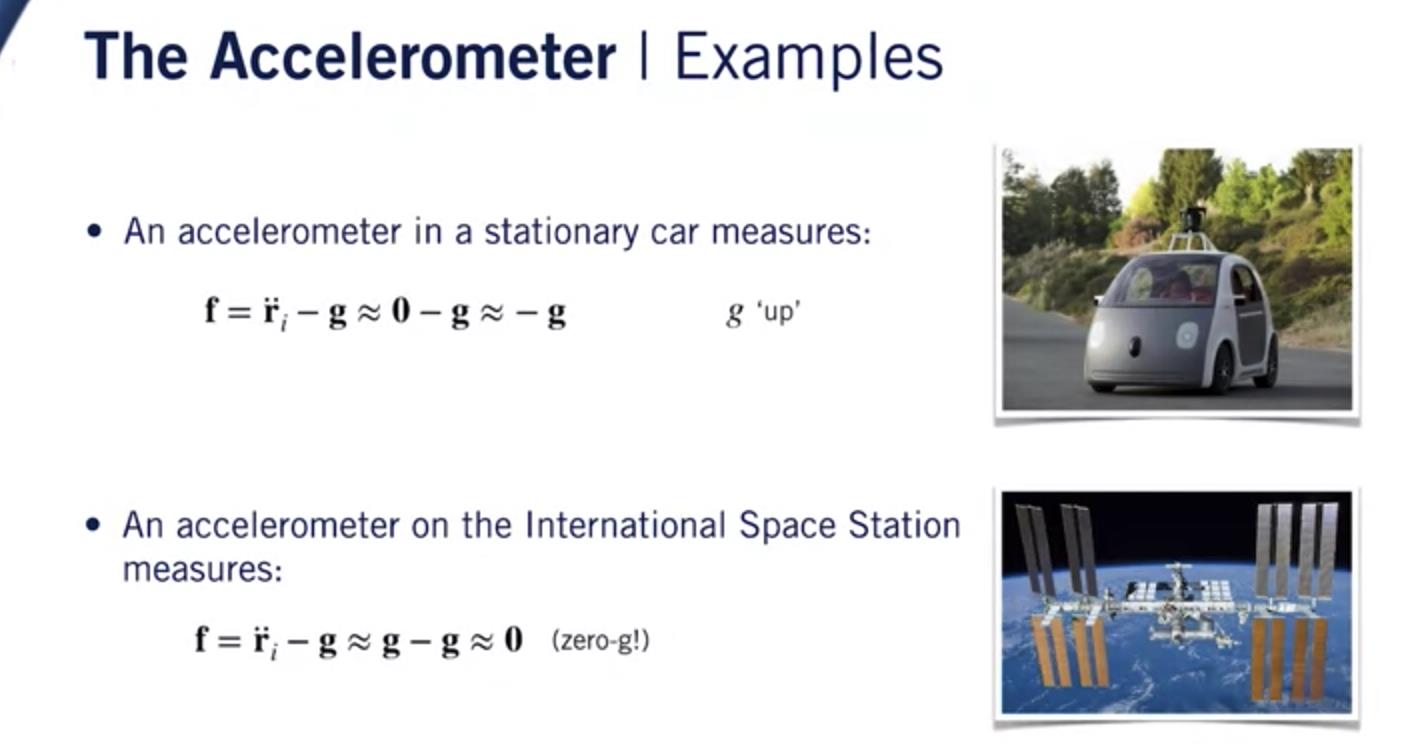
为了计算这个加速度,我们需要使用基本方程 重力场中的加速度计。 在固定框架中计算的二阶导数对立, 是比力和重力加速度之和。 有时这可以是总结和直观的概念。 所以让我们在这里探索一下 静止汽车中的加速度计向上测量 g, 因为坐标加速度为零,忽略地球自转。 由于重力向下作用,它的负值是标量常数 g 在向上的方向。
让我们看一个在国际空间站或国际空间站上的例子。 g 在低地球轨道上的值是不是更小? 嗯,是的,但是 与地球表面的值相比,只有大约 10%。 我们之所以经常听到 0 g 这个词,是因为整个国际空间站都在 与里面的宇航员一起自由落体。
刚性连接到站的加速度计将有一个坐标 加速度等于g。 这意味着加速度计测量的比力将为 0。
另一种说法是,相对于自由的适当加速度 下降为0。 国际空间站正在自由落体。 实际上,残余的大气阻力和结构振动会产生一些 测量加速度,但它们通常低至 10 到 -6 g。
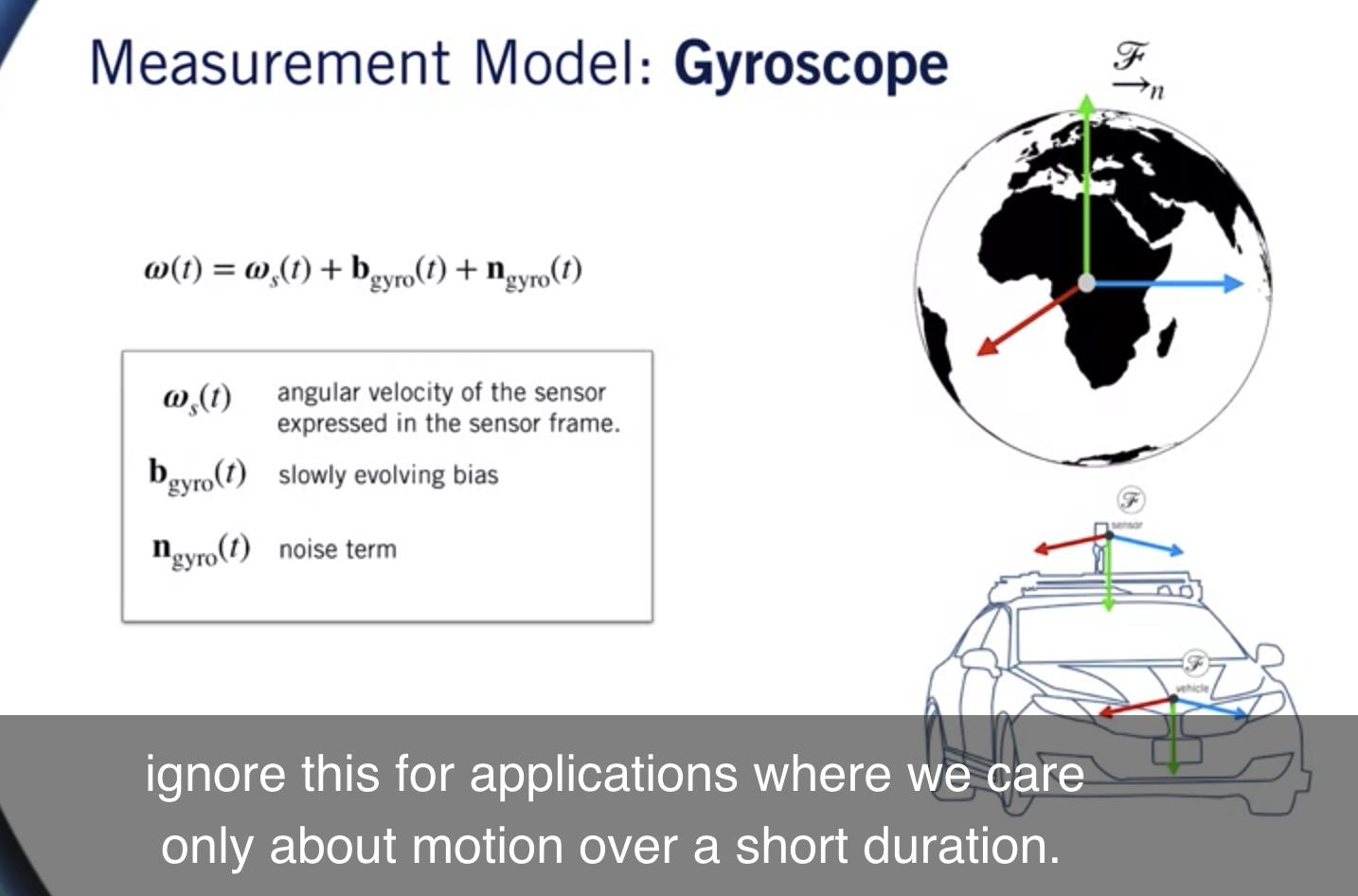
现在,我们了解了陀螺仪的基本原理和 加速度计,让我们讨论测量模型 我们需要知道才能将它们合并到状态估计器中。 [声音] 使用我们在上一课中讨论的符号, 让我们为陀螺仪的测量定义一个表达式。
来自所有三个陀螺仪的角旋转率, 是体坐标系相对于惯性坐标系的角速度, 在身体框架中表达。
它将添加一个缓慢变化的偏差项和 用于模拟传感器误差的白高斯加性噪声项。 虽然陀螺仪确实测量地球的自转,但通常是安全的 对于我们只关心短时间运动的应用程序,请忽略这一点。
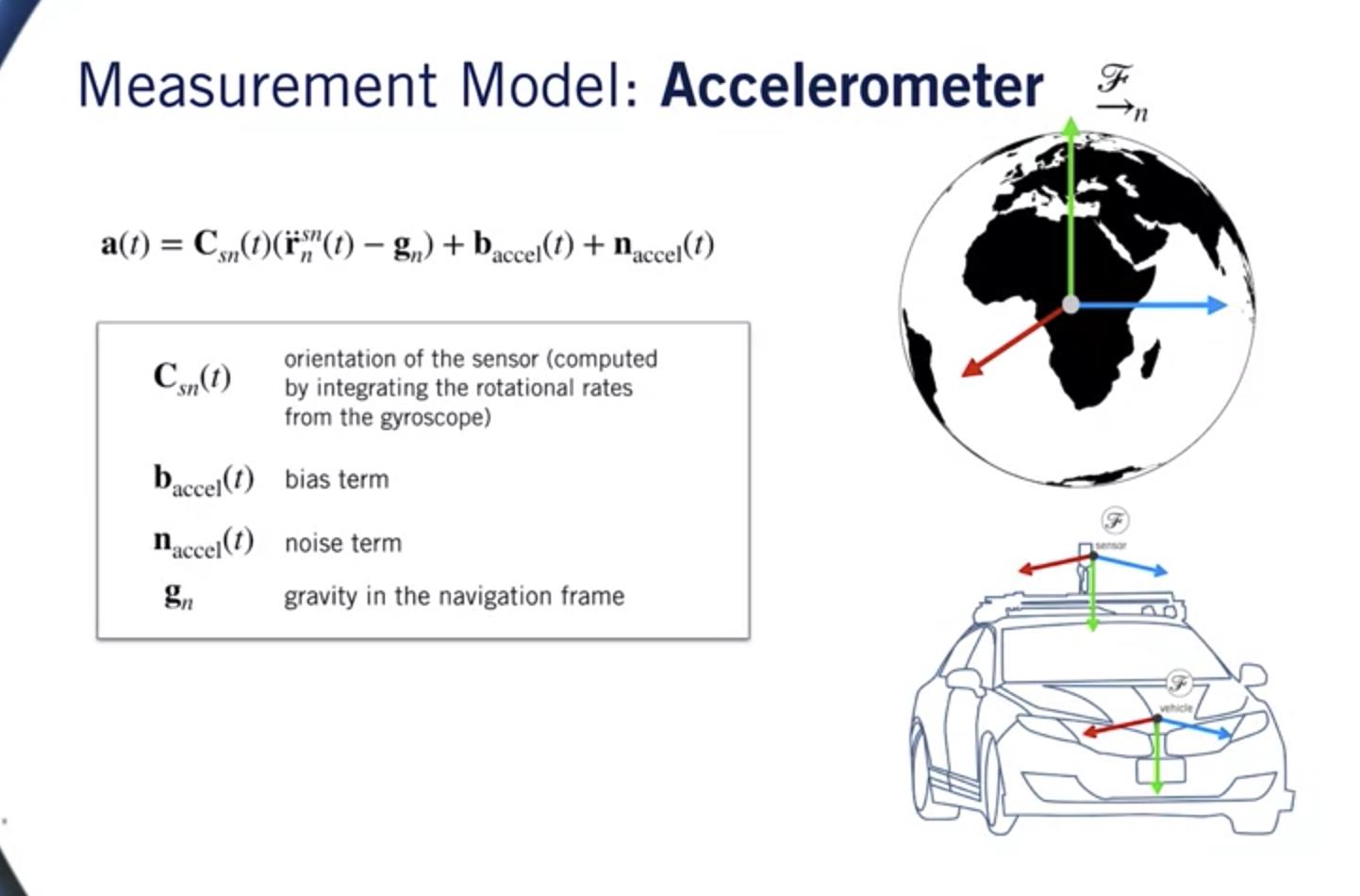
我们的加速度计测量模型将具有类似的噪声和偏置项。 但是现在不是像我们可以做的那样直接测量身体加速度 旋转速率,我们需要明确地消除重力的影响 使用我们在重力场中的加速度计的基本方程。
由于加速度计测量 IMU 车身框架中的加速度, 我们将需要始终跟踪方向,以便 能够执行必要的减法。
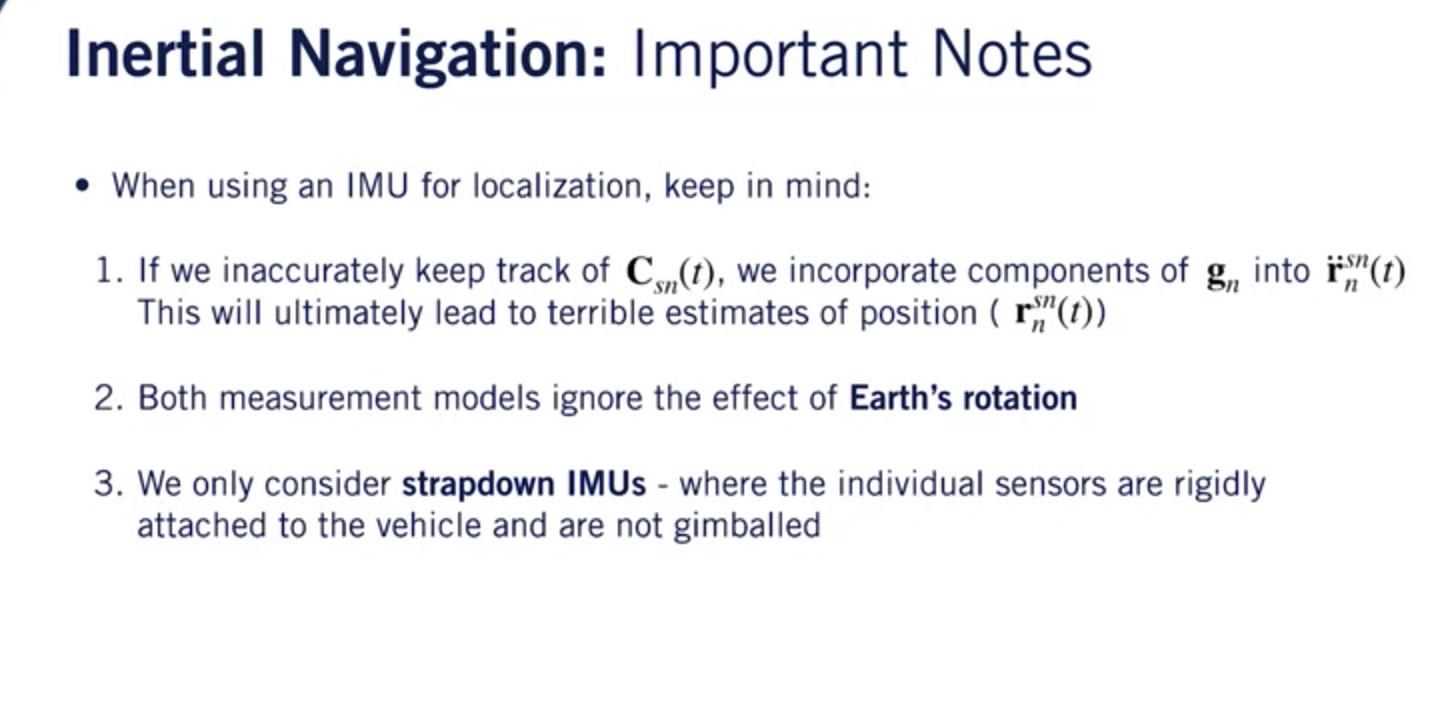
最后,让我们讨论一下我们模型的一些重要限制。
首先,准确的方向估计对于准确的位置估计至关重要。 当我们将测得的比力转换为加速度时,我们必须使 确保重力方向正确。 否则,即使方向上的一个小错误也会使我们认为我们 当我们不在时正在加速。
其次,我们推导出的两个模型都忽略了 地球自转的影响。 对于更远距离的导航,这实际上很重要。
最后,我们推导出的模型适用于捷联 IMU。 这些是物理固定在车辆上的 IMU, 不要在万向节上安装纺车。 虽然后者可能更准确,但它们很少用于 汽车应用,因为它们的体积和成本。
总而言之,在这段视频中,我们了解到 6 自由度 IMU 是 由三个陀螺仪和三个加速度计组成。 陀螺仪测量传感器框架中的旋转速率。
加速度计测量非重力比力 传感器框架也是如此。
由于捷联 IMU 难以校准和随时间漂移, 我们需要另一个传感器来定期更正我们提出的估计。 为此,我们可以使用现代全球导航卫星系统。 我们将更多地谈论 这在下一讲中。
补充阅读:惯性测量单元(IMU)
要了解有关 IMU 及其应用的更多信息,请查看以下资源:
-
在Jay A. Farrell 的 Aided Navigation (2008) 的第 11 章第 1 节中检查惯性导航的技术描述。
-
回顾惯性导航 40 年的进步,这篇文章由 Anthony King (1998)从 GEC Review 杂志中总结。
参考
https://www.coursera.org/learn/state-estimation-localization-self-driving-cars/lecture/TBMU9/lesson-2-the-inertial-measurement-unit-imu
以上是关于惯性测量传感器的啥六轴,九轴指的是啥的主要内容,如果未能解决你的问题,请参考以下文章
STM32实现六轴姿态测量陀螺仪模块JY61P(标准库与HAL库实现)
STM32实现六轴姿态测量陀螺仪模块JY61P(标准库与HAL库实现)
自动驾驶 10-2: 惯性测量单元 (IMU)The Inertial Measurement Unit (IMU)