数据融合基于AIS和雷达的多传感器航迹融合matlab源码
Posted 博主QQ2449341593
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了数据融合基于AIS和雷达的多传感器航迹融合matlab源码相关的知识,希望对你有一定的参考价值。
多传感器融合--MATLAB跟踪器介绍
MATLAB通过多目标跟踪器可以融合多传感器检测到的目标信息,常用到的多目标跟踪器有trackerGNN、trackerJPDA、trackerTOMHT 、trackerPHD等。trackerGNN通过假设一个跟踪的目标只能与一个测量目标匹配。trackerJDPA对每一个跟踪的目标可能匹配多个测量到的目标。trackerPHD通过概率假设密度(PHD)函数来跟踪目标。trackerTOMHT认为跟踪的目标存多个假设的目标与之匹配。
1、跟踪器的使用步骤
MATLAB中使用跟踪器的主要步骤有(1)设定跟踪器的参数,(2)获得检测目标的信息,调用跟踪器,(3)提取跟踪成功的目标的位置及速度信息。
(1)设定跟踪器的参数,如下所示
tracker = trackerGNN('FilterInitializationFcn', @initcvkf,'AssignmentThreshold',10, ...
'ConfirmationThreshold', [3 5], 'TrackLogic', 'History', ...
'DeletionThreshold', 10);
(2)获得检测目标的信息,调用跟踪器,如下所示
[confirmed,tentative,alltracks,info] = tracker(detection,time);
(3)提取跟踪成功的目标的位置及速度信息,如下所示
[pos,cov] = getTrackPositions(confirmed,positionSelector);
vel = getTrackVelocities(confirmed,velocitySelector);
2、测量目标的创建
表1 测量目标的属性表
| 序号 | 符号 | 描述 |
| 1 | Time | 目标的时间戳 |
| 2 | Measurement | 测量目标的结果 |
| 3 | MeasurementNoise | 测量目标的结果噪声 |
| 4 | SensorIndex | 测量的传感器的类型 |
| 5 | ObjectClassID | 测量目标的类型 |
| 6 | MeasurementParameters | 非线性卡尔曼滤波器初始化参数 |
| 7 | ObjectAttributes | 跟踪器的其它附加信息 |
测量目标属性表通过detection = objectDetection(time,measurement) 函数获得,输入是时间和测量的目标的结果。
通过如下两个例子可以建立测量目标
例1:detection = objectDetection(1,[100;250;10])
例2:detection = objectDetection(1,[100;250;10],'MeasurementNoise',10, ...
'SensorIndex',1,'ObjectAttributes',{'Example object',5})
3、跟踪目标的获得
表2 跟踪目标的属性表
| 序号 | 符号 | 描述 |
| 1 | TrackID | 跟踪目标ID(唯一) |
| 2 | Time | 跟踪目标的更新时间 |
| 3 | Age | 跟踪目标的从首次初始化后的更新次数 |
| 4 | State | 跟踪目标的状态矩阵 |
| 5 | StateCovariance | 跟踪目标的状态协方差矩阵 |
| 6 | IsConfirmed | 目标是否被证实的状态,它为真表示目标为真实目标。 |
| 7 | IsCoasted | 滑行状态,它为真表示跟踪的目标在没有检测到的情况进行的更新 |
| 8 | ObjectClassID | 表示目标的分类,0表示目标类型未知 |
| 9 | ObjectAttributes | 包含传感器检测到目标的属性元胞数组 |
通过[confirmed,tentative,alltracks,info] = tracker(detection,time)可获得confirmed和tentative,它们分别指的是跟踪器返回的已经证实的真目标和假设的目标。Confirmed tracks 和Tentative tracks 两类目标都包含有表2的目标属性。
4、跟踪及测量目标的图形化
Matlab通过创建theater 绘图来展现虚拟化的跟踪目标和测量目标。Matlab 中的trackPlotter 函数与detectionPlotter 函数分别用于在theater 中绘制跟踪目标和测量目标的结果。具体例子如下所示:
(1)初始化跟踪目标和测量目标的结果
tp = theaterPlot('XLimits',[-1 1200],'YLimits',[-600 600]); %%确定绘制区域X轴,Y轴的范围
trackP = trackPlotter(tp,'DisplayName','Tracks','MarkerFaceColor','g', ... 'HistoryDepth',0); %% 绘制跟踪目标
detectionP = detectionPlotter(tp,'DisplayName','Detections','MarkerFaceColor', ... 'r'); %% 绘制测量到的目标
(2)更新跟踪目标和测量目标的结果
trackP.plotTrack(pos,vel,cov,labels); %%更新跟踪目标
detectionP.plotDetection(meas',measCov);%%更新测量目标
5、其它
在使用matlab的跟踪器时遇到的问题汇总如下:
- matlab的跟踪器默认采用的扩展卡尔曼滤波器(EKF),其函数要求测量的结果为三维的(X,Y,Z),如果是二维的则会报错误。
解决方法:将跟踪器的滤波方法设置为卡尔曼滤波(KF),或者将二维数据扩充为三维,第3维的测量数据一直为0。
- MATLAB的plotTrack(trPlotter,pos,vel,cov) 函数要求pos、vel、cov为三维信息,如果只有2维信息直接调用该函数会报维度不匹配的错误。
解决方法:在调用plotTrack函数之前将二维的位置、速度、协方差信息扩展成三维之后再调用plotTrack函数绘制跟踪结果。对于plotDetection函数同样可采用该方法进行处理。
clc;
clear;
close all
load('MarCE_Radar_Detections_01_005_patched.mat');
load('dtGroundTruthAIS.mat')
figure(1);
for i = 1:numel(data)
TR = extractfield(data{i},'TR');
TR = reshape(TR,2,[]);
Azimuth = TR(1,:);
Range = TR(2,:);
[X,Y] = pol2cart(Azimuth, Range);
plot(X,Y,'.b');
axis([-7000 7000 -7000 7000]);hold on;
A = gt{i};
scatter(A(:,1),A(:,2),'r.');
% pause(.01);
end
grid on;
xlabel('X')
ylabel('Y')
title('Radar Data with AIS Ground Truth')
legend('Radar Data','AIS Data')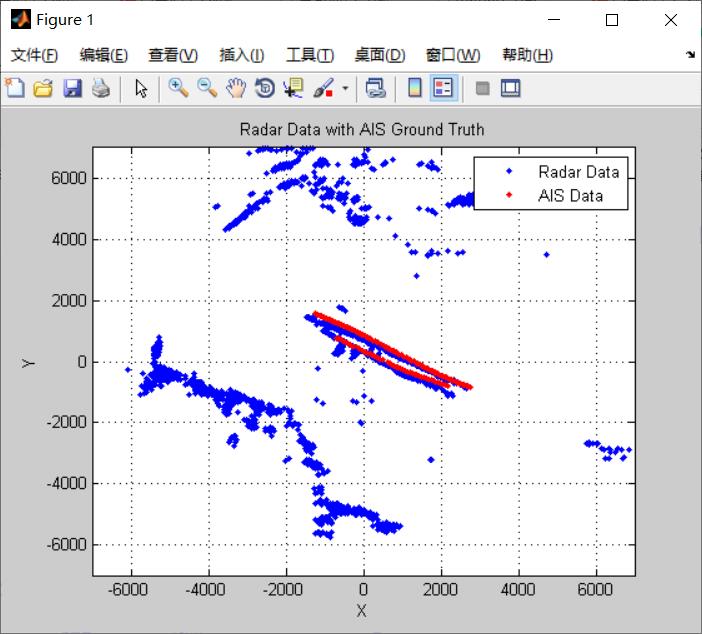
完整代码添加QQ1575304183
以上是关于数据融合基于AIS和雷达的多传感器航迹融合matlab源码的主要内容,如果未能解决你的问题,请参考以下文章
camera-radar基于ROS的多传感器融合感知系统实现(雷达+相机)
camera-radar基于ROS的多传感器融合感知系统实现(雷达+相机)
camera-radar基于ROS的多传感器融合感知系统实现(雷达+相机)