camera-radar基于ROS的多传感器融合感知系统实现(雷达+相机)
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了camera-radar基于ROS的多传感器融合感知系统实现(雷达+相机)相关的知识,希望对你有一定的参考价值。
实现功能:代码下载地址:下载地址
1)基于深度学习的目标检测;2)基于雷达的距离估计和预测;3)多传感器感知结果融合模块。
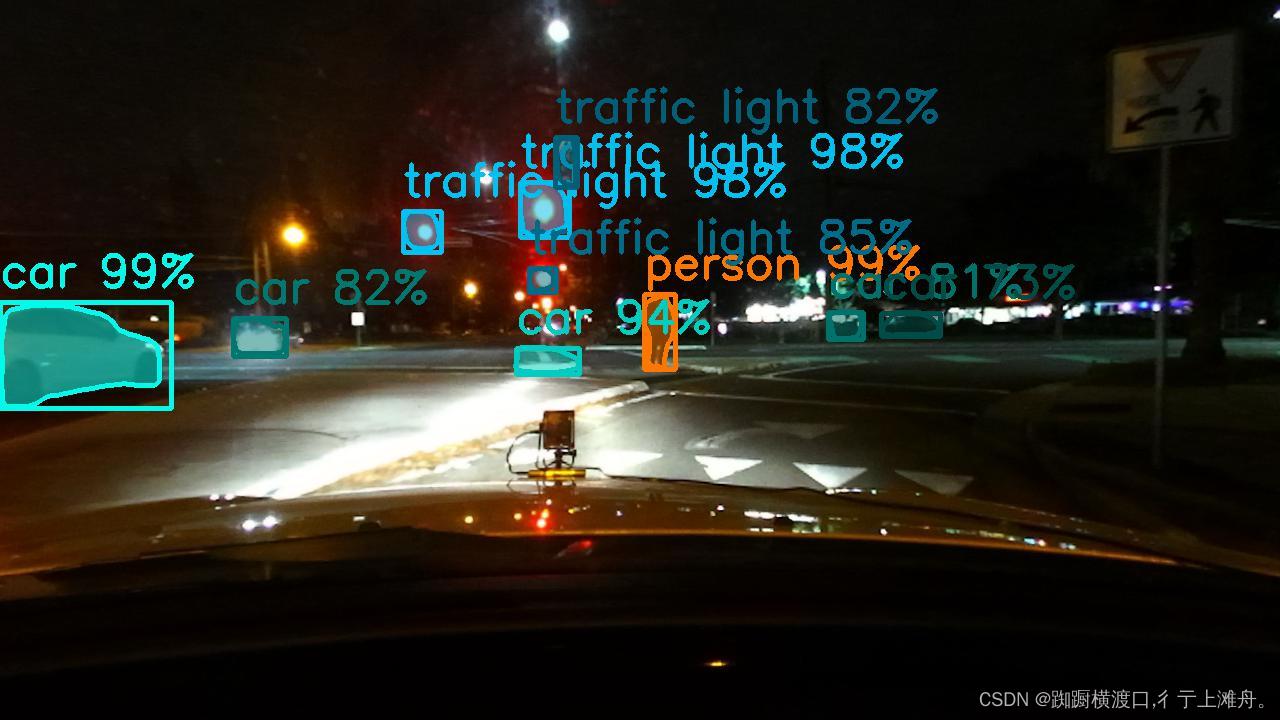
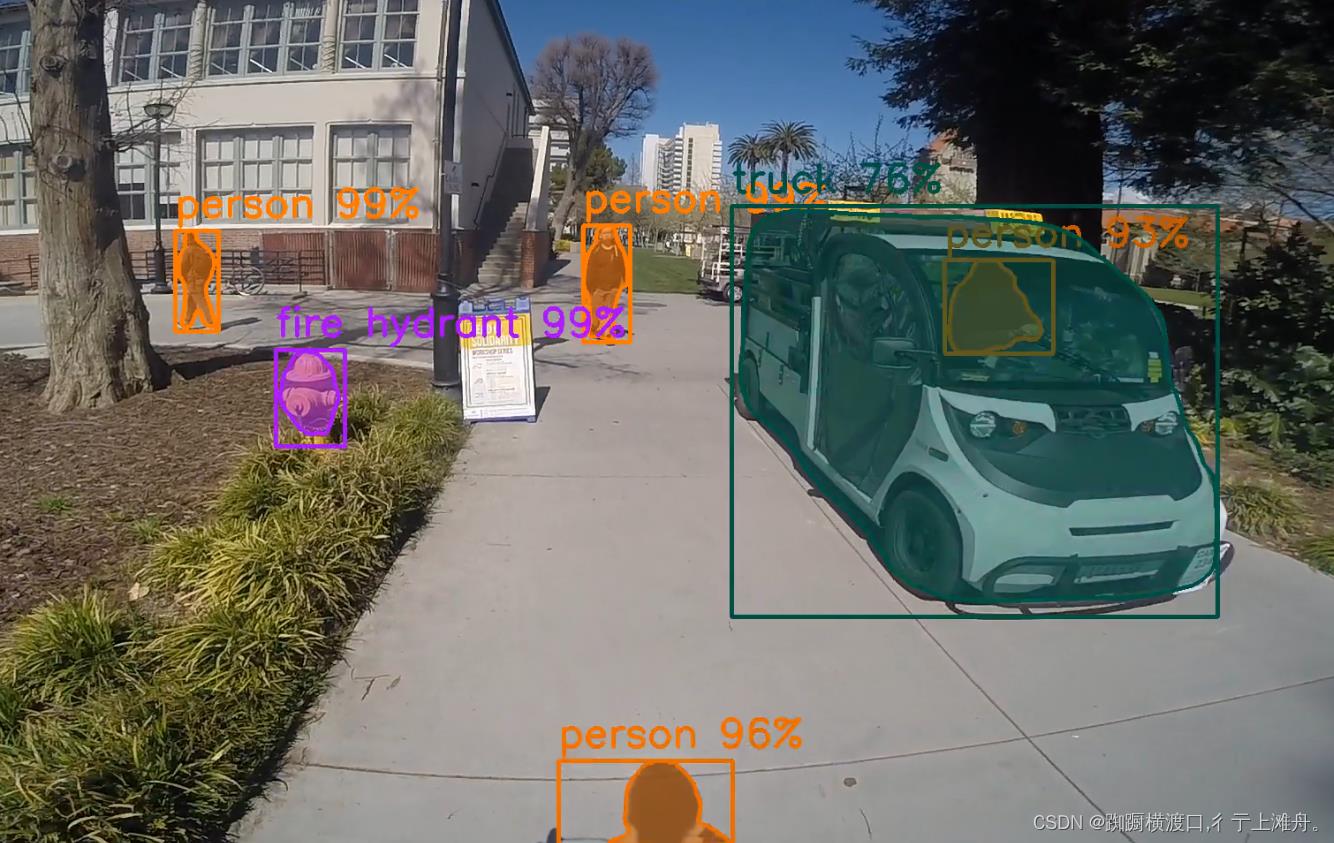
相机感知模块解析
4. Run nodes:
python3 fusion_node/main.py
python3 gps_node/main.py
python3 radar_node/main以上是关于camera-radar基于ROS的多传感器融合感知系统实现(雷达+相机)的主要内容,如果未能解决你的问题,请参考以下文章