元胞自动机基于matlab元胞自动机模拟小区车流量含Matlab源码 358期
Posted 唐门佛怒唐莲
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了元胞自动机基于matlab元胞自动机模拟小区车流量含Matlab源码 358期相关的知识,希望对你有一定的参考价值。
一、简介
元胞自动机(CA)是一种用来仿真局部规则和局部联系的方法。典型的元胞自动机是定义在网格上的,每一个点上的网格代表一个元胞与一种有限的状态。变化规则适用于每一个元胞并且同时进行。典型的变化规则,决定于元胞的状态,以及其( 4 或 8 )邻居的状态。
1 对元胞自动机的初步认识
元胞自动机(CA)是一种用来仿真局部规则和局部联系的方法。典型的元
胞自动机是定义在网格上的,每一个点上的网格代表一个元胞与一种有限的状
态。变化规则适用于每一个元胞并且同时进行。
2 元胞的变化规则&元胞状态
典型的变化规则,决定于元胞的状态,以及其( 4 或 8 )邻居的状态。
3 元胞自动机的应用
元胞自动机已被应用于物理模拟,生物模拟等领域。
4 元胞自动机的matlab编程
结合以上,我们可以理解元胞自动机仿真需要理解三点。一是元胞,在matlab中可以理解为矩阵中的一点或多点组成的方形块,一般我们用矩阵中的一点代表一个元胞。二是变化规则,元胞的变化规则决定元胞下一刻的状态。三是元胞的状态,元胞的状态是自定义的,通常是对立的状态,比如生物的存活状态或死亡状态,红灯或绿灯,该点有障碍物或者没有障碍物等等。
二、源代码
%% 初始化运行空间
clear all;
%clc;
warning off;
dbstop if error
W = 0;
%% 模型主要参数设置
red_light_time = 60;%红灯时间
green_light_time = 40;%绿灯时间
fresh_frequency = 0.1;%刷新速率
num_of_street = 4;%小区道路的数量,也就是交叉口的数量
global pixellength;%定义全局变量车道长度
pixellength = 30;%主道的长度
side_length = 25;%小区边长
%% 用来统计数据的变量
global speed_index
speed_index=0;
loop_times = 10;%循环`次数;
time_step_length = loop_times*(red_light_time+green_light_time)/2;
avr_move_steps = ones(1,time_step_length);
store_num_of_cars = ones(1,time_step_length);
store_num_of_jam_cars = ones(1,time_step_length);
avr_mainroad_move_steps = ones(1,time_step_length);
%% 生成运行改进后的N-S模型所需的变量.
B = side_length+1;
L = 1;
pixel = create_pixel(B,L,side_length);%生成元胞空间的状态矩阵
pixel = create_street(pixel , num_of_street+1 ,side_length);%生成小区道路
pixel_speed = zeros(size(pixel));%小车的速度矩阵,对应所在位置的小车的速度
temp_handle = show_pixel(pixel,B,NaN);%显示元胞矩阵
%% 循环刷新每一时步的图像,统计数据.
for i = 1:loop_times
waiting_time = 0;
output = 0;
entry = 0;
traffic_capacity = 0;
if mod(i,2)~=0
pixel(end,end-1) = 0;%红灯变绿灯
for xx=1:green_light_time
[pixel,pixel_speed,move_step,num_of_cars,num_of_jam_cars,avr_mainroad_move_step] = go_forward(pixel,pixel_speed); %前进规则
[pixel,pixel_speed] = new_cars(pixel,1,pixel_speed); %将生成的车辆加到元胞空间矩阵中
entry = entry + 1;
%waiting_time = waiting_time + compute_wait(pixel); %进行求和求总的时间
%==============
temp_handle = show_pixel(pixel,B,temp_handle);%刷新图像
%drawnow
%==============
pixel = clear_boundary(pixel);%将要离开系统的车辆,需要将车辆从系统中移除
%k = k+1;
pause(fresh_frequency);
speed_index=speed_index+1;
avr_move_steps(speed_index)=move_step;
store_num_of_cars(speed_index) = num_of_cars;
store_num_of_jam_cars(speed_index)=num_of_jam_cars;
avr_mainroad_move_steps(speed_index)=avr_mainroad_move_step;
end
else
pixel = red_light_on(pixel);%绿灯变红灯
for xx=1:red_light_time
[pixel,pixel_speed,move_step,num_of_cars,num_of_jam_cars,avr_mainroad_move_step] = go_forward(pixel,pixel_speed); %前进规则
[pixel,pixel_speed] = new_cars(pixel,1,pixel_speed); %将生成的车辆加到元胞空间矩阵中
temp_handle = show_pixel(pixel,B,temp_handle);%更新图像
drawnow
pause(fresh_frequency);
pixel = clear_boundary(pixel);
speed_index=speed_index+1;
avr_move_steps(speed_index)=move_step;
store_num_of_cars(speed_index) = num_of_cars;
store_num_of_jam_cars(speed_index)=num_of_jam_cars;
avr_mainroad_move_steps(speed_index)=avr_mainroad_move_step;
end
end
end
function [pixel,pixel_speed,move_steps,num_of_cars,jam_cars,main_road_move_steps] = go_forward(pixel,pixel_speed)
%前进规则
%否则,该车以概率为prob前进到它前面的位置
[L, W] = size(pixel); %get its dimensions
prob = 0.9;
temp_pixel = pixel;
global total_speed;
num_of_cars=0;
speed_max = 3;%最大速度
jam_cars= 0;
move_steps=0;
main_road_move_steps=0;
%if ~isempty(find(pixel(:,W-1)==-3,1))%在这一步时,消除拐玩进入小区道路时占用的pixel(i,j)
pixel(pixel(:,W-1)==-3,W-1) =0;
pixel(pixel<=-4&pixel>=-10) = pixel(pixel<=-4&pixel>=-10)+1;
%end
move_steps=0;
%% 车辆前进的逻辑
for i = (L-1):-1:1
for j =1: W-1
if temp_pixel(i,j) == 1%主干路的移动情况
if temp_pixel(i+1, j) ~= 0%堵车啦
if temp_pixel(i, j-1)==0&&(temp_pixel(i+1, j)&temp_pixel(i+2, j)) ~= 0%当车的右侧有入口且前方阻塞时右拐入小区
pixel(i,j) = -8;%在此时步占用 pixel(i,j),下一时步再将pixel(i,j)设为0,以此来表示进入口对道路通行的影响
pixel(i, j-1) = -8;
end
pixel_speed(i,j) = 0;
elseif prob >= rand%向前移动
if i+pixel_speed(i,j)>L%越过边界时
next = find(temp_pixel(i+1:L,j),1);%判断下一次的加速移动是否会碰撞
if ~isempty(next)&&next~=1%会碰到则按照N-S规则,移动至前车n后并速度降为Vn-1
total_speed=total_speed+(next-1);
move_steps=move_steps+(next-1);
next = next + i;
pixel(next-1,j) = 1;
%disp(next)
pixel(i,j)=1;%既占用小区路口又占用
pixel_speed(i,j)=0;
pixel_speed(next-1,j)=1;
elseif isempty(next)
pixel(i,j)=0;
total_speed=total_speed+pixel_speed(i,j);
move_steps = move_steps+pixel_speed(i,j);
end
break;
end
temp_pixel(temp_pixel==-2)=3;%将红绿灯转成正数方便判断
next = find(temp_pixel(i+1:(i+pixel_speed(i,j)),j),1);%判断下一次的加速移动是否会碰撞
if ~isempty(next)&&next~=1%会撞到前车到则按照NaSch规则,移动至前车n后并速度降为Vn-1
total_speed=total_speed+(next-1);
move_steps = move_steps+(next - 1);
next = next + i;
%disp(next)
pixel(i,j)=0;
pixel(next-1,j) = 1;
pixel_speed(i,j)=0;
pixel_speed(next-1,j)=1;
elseif isempty(next)
pixel(i,j)=0;
pixel(i+pixel_speed(i,j), j) = 1;
total_speed=total_speed+pixel_speed(i,j);
move_steps = move_steps+pixel_speed(i,j);
if (pixel_speed(i,j)+1)>speed_max
pixel_speed(i+pixel_speed(i,j), j)=speed_max;
else
pixel_speed(i+pixel_speed(i,j), j)=pixel_speed(i,j)+1;
end
end
end
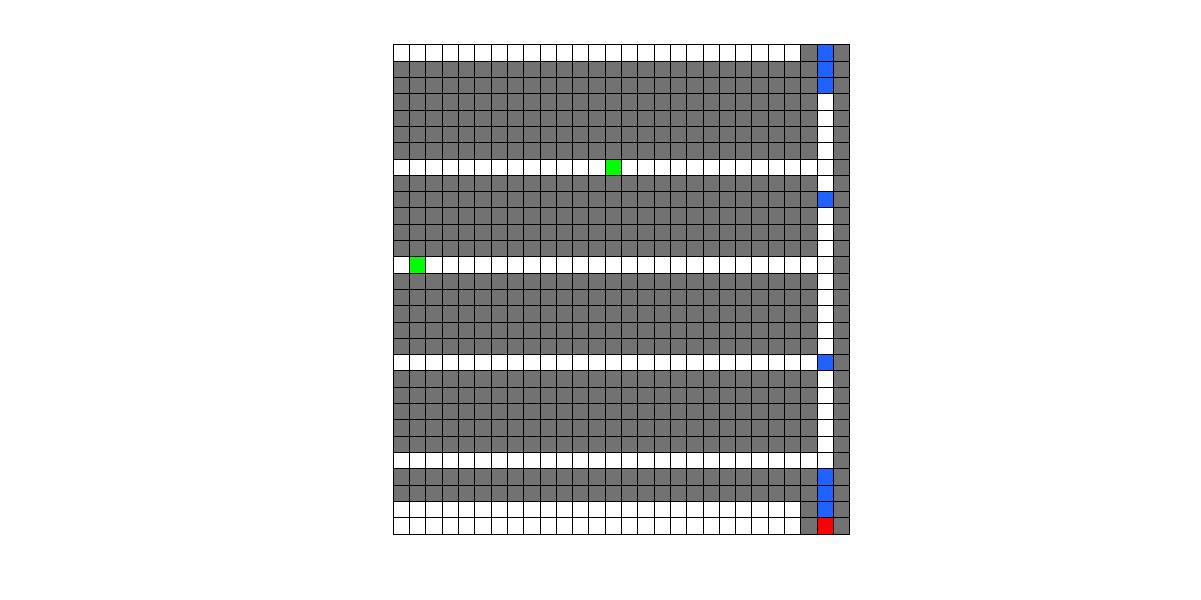
三、运行结果
四、备注
版本:2014a
需要完整代码或代写加QQ 1564658423
以上是关于元胞自动机基于matlab元胞自动机模拟小区车流量含Matlab源码 358期的主要内容,如果未能解决你的问题,请参考以下文章
元胞自动机基于元胞自动机模拟城市小区开放对周边道路通行的影响研究matlab源码
元胞自动机基于matlab元胞自动机车流密度不变下的双向两车道仿真(T 字形路口)含Matlab源码 1290期
元胞自动机基于matlab元胞自动机求解城市小区开放对周边道路通行影响研究含Matlab源码 233期
元胞自动机基于matlab界面聚合元胞自动机模拟含Matlab源码 2004期