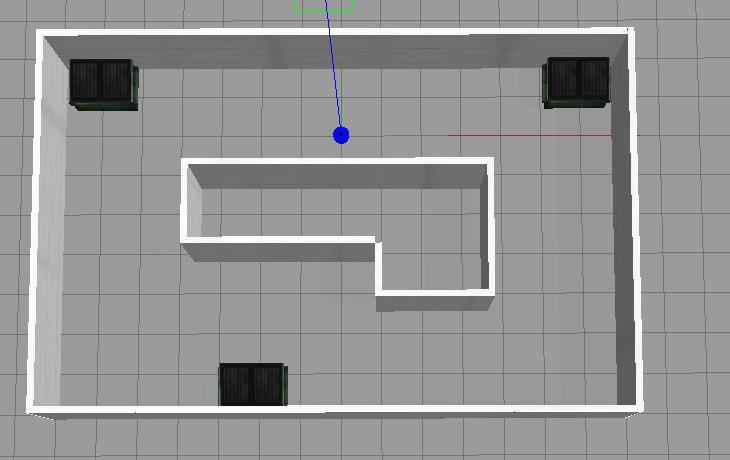
ROS学习笔记-导入并打开搭建好的仿真环境
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记-导入并打开搭建好的仿真环境相关的知识,希望对你有一定的参考价值。
以上是关于ROS学习笔记-导入并打开搭建好的仿真环境的主要内容,如果未能解决你的问题,请参考以下文章
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记-导入并打开搭建好的仿真环境相关的知识,希望对你有一定的参考价值。
以上是关于ROS学习笔记-导入并打开搭建好的仿真环境的主要内容,如果未能解决你的问题,请参考以下文章