ROS学习笔记-rqt_plot工具的使用
Posted 殇堼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记-rqt_plot工具的使用相关的知识,希望对你有一定的参考价值。
官网:http://wiki.ros.org/rqt_plo
rqt_plot的作用
将话题发布的消息进行可视化,但只能显示二维消息,比如物体在平面内的运动轨迹的坐标集,也就是xy坐标系。
ROS中专门用于数据绘制的工具。
1.启动rqt_plot
方法1:直接启动rqt,包含了所有rtq工具,然后在上方的菜单栏选择rqt_plot。
rqt
方法2:单独打开
rqt_plot
2.绘图
以小海龟例程为例,打开小海龟节点后,在rqt_plot工具中输入话题名称,按回车键即可。
如果不清楚目前有哪些话题,可以终端使用话题查询命令“rostopic list”查看。
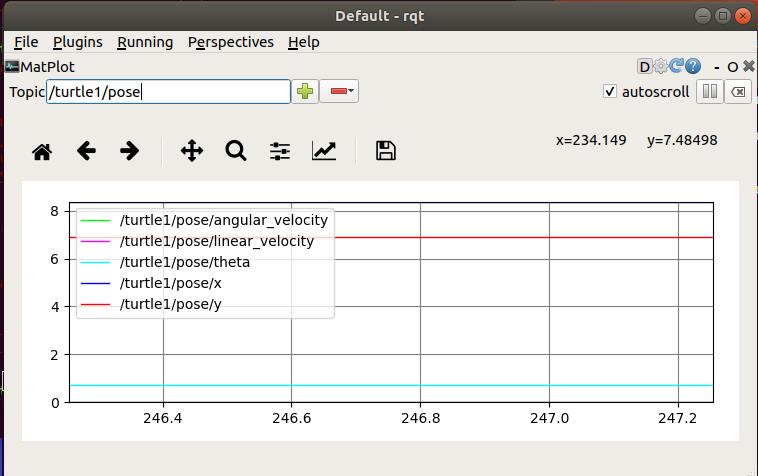
红色的减号是用于选择性删除显示的话题曲线。
绿色的加号用于查看所有打开的话题。
查看话题的类型:
rostopic type /话题;
查看话题发布的消息:
rosmsg show 话题类型
查看某个话题的某个消息:
rqt_plot /topic/X #X是消息
以上是关于ROS学习笔记-rqt_plot工具的使用的主要内容,如果未能解决你的问题,请参考以下文章
plotjuggler⬅ROS1/ROS2画轨迹神器➡rqt_plot+rqt_multiplot之超级加强版
plotjuggler⬅ROS1/ROS2画轨迹神器➡rqt_plot+rqt_multiplot之超级加强版