自动挡车带自动启停怎么等红绿灯 自动挡汽车在等红绿灯时有三种方法等待红灯
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动挡车带自动启停怎么等红绿灯 自动挡汽车在等红绿灯时有三种方法等待红灯相关的知识,希望对你有一定的参考价值。
1、启动的正确姿势:首先,出于安全的考虑,变速箱处于D挡或者R挡肯定是没法启动的,我们想想,如果一启动车子就给你没有一丝丝防备地“动次打次”,你那颗小心肝受得了?如果你偏要在D挡和R挡强行启动,汽车就不干了,就会发出警报!那又有人要问了,那P挡和N挡呢?
实践是检验真理的唯一标准,P挡和N挡的情况下是可以启动着车的,小编告诉你们,因为P挡和N挡都是切断了发动机和变速箱之间的连接,这样发动机就“义无反顾”的启动着火了。而有些固执有个性的人儿就会说,我就要坚持N挡启动,这是为何?是因为他们认为如果P挡启动前进之前,要先经过一次R挡才到达到把档位挂到D挡,会在R挡产生一定的反作用力...
2、停车步骤要怎么操作:首先搞清楚下P挡和N挡的不同点,P挡和N挡的最大区别就是P挡多了一个“爪子”,这个“瓜子”能帮你紧紧抓住齿轮,能在一些小坡上帮你不溜车,但是小编却要跟大家说手刹才是真正的“大爪子”,用好“大爪子”才是你停好车的一大法宝!一个保险不够就上双保险,当然有些车子上的手刹是脚刹的形式,不过使用原理都是一样的!
3、应该是先拉手刹还是先挂P挡:这个问题一般会出现在半坡停车的时候,如果先挂P挡,我们会发现,车子遛了一下才能停住。这其实是因为P挡的小爪子不是所有时候都能一下子抓住停车齿轮的,都是需要一个特定的角度才能把齿轮抱死,所以车子会出现后溜的情况!这样情况下,当我们下次启动时,因为爪子和齿轮的“焦灼”,所以我们很难换挡,不知道细心的各位,有没有发觉?所以为了避免这样的情况,小编就建议大家先可以拉手刹,让力都作用在手刹上,然后再切p挡!这样再次换挡就用那种生涩的感觉了,两个字:顺溜!
4、正确的停车姿势如下:刹车-挂空挡-拉手刹-松手刹-P档走人
5、等红灯用P挡、N挡还是D挡:较长时间等红灯,一般超过30秒,正确姿势是:挂N挡拉手刹,因为N挡是没有爪子的,如果这个时候有人追你尾巴了,变速箱的齿轮还是保持一个滚动的状态,是不会被撞坏的!当然,短时间的停车,一般是30秒内,完全可以在D挡的情况,踩住刹车即可了!就是D挡怠速的情况下会开启“按摩”模式,因为发动机怠速情况下,是会有点抖的! 参考技术A 自动挡汽车,在等红绿灯时,有以下三种方法等待红灯:
1、红灯的时间比较短的,可以不用换挡,在前进挡(d挡)的情况下,踩住刹车,等待红灯就可以。
2、如果红灯的时间比较长(60秒以上的)在路面很平坦的情况下,可以挂在空挡,即n挡。
3、红灯时间长,路面又有斜坡的,就要挂在停车挡(p挡)了,挂在空挡会溜车,造成刮碰事故。
ADAS与自动驾驶汽车仿真的六个方面
高级驾驶员辅助系统(ADAS)与自动驾驶汽车的研发不仅极富挑战,且无先例可循。此技术的实现需传感器技术、机器学习和人工智能方面不断取得新的发展。用人工智能取代人类驾驶员面临的首要问题就是机器感知。自动驾驶汽车的计算机不仅需要能够识别其他车辆、行人、道路标志、道路标线、树木、建筑物、红绿灯以及我们在日常驾驶中遇到的很多其他事物,同时还需克服夜晚中的黑暗、雨雪天气等恶劣驾驶条件下的识别问题。基于传统规则的计算机算法几乎不可能解决这个问题,需要使用神经网络和机器学习方法。
通过这些方法,可以训练计算机,而非对其进行编程。但是驾驶是一项错综复杂的任务,需要大量的训练才能让计算机像普通人一样安全、可靠地驾驶。据估计,要确保ADAS 和自动驾驶汽车的安全性和可靠性,需要数10亿英里的道路测式。这项看似不可能的任务只有借助工程仿真才能实现,运用仿真技术能够以极低的成本准确快速地对数以千计的驾驶情境和设计参数进行虚拟测试。本文将介绍仿真技术在研发自动驾驶汽车和高级驾驶员辅助系统过程中发挥重要作用的六个具体方面 ,同时介绍ADAS和自动驾驶汽车仿真所需的工具。
01、驾驶情境系统仿真
利用全自动或半自动汽车的系统级行为模型进行综合全面的驾驶情境仿真。这类车辆模型包含所有传感器、 控制系统、 驱动系统租车身,并被放置 在包含道路、建筑糊、行人以及路标的虚拟驾驶环境里。在这种仿真环境中,可以迅速评估数以干计的驾驶情境,以便测试汽车传感器、 控制算法和驱动系统在相应条件下是否都按照预期进行工作。从本质上讲,自动驾驶汽车技术与ADAS系统是控制环路,包含物理领域、传感器、控制器和致动器这四个基本要素。当汽车在物理世界中行驶时,传感器会感应车辆周围的物体,控制器会根据所感应到的物体做出决策,而致动器会依照控制器的指令驱动汽车。
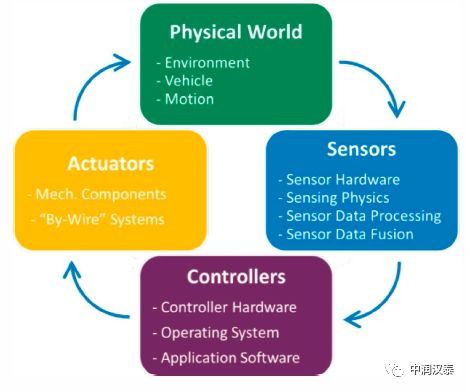
由四个要素构成的控制环路
在仿真完整的驾驶情境时,例如汽车驶近交叉路口,寻找交叉车流,等待交叉车流畅通,直到安全时再通过交叉路口,这种情况就需要进行系统仿真。
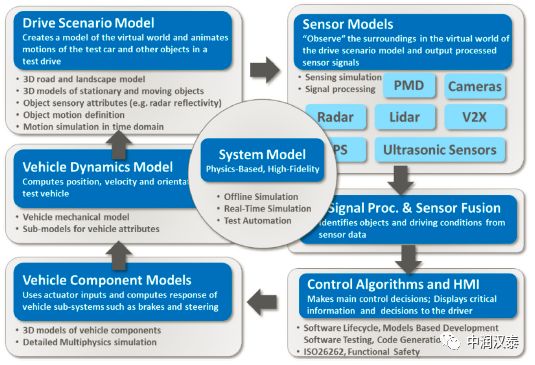
自动驾驶控制环路的仿真
系统仿真步骤:
第一步:建立由虚拟道路、 建筑物、 行人和其他车辆等构成的环境模型,而有待研究的汽车(指自动驾驶汽车)则在这个虚拟世界中行驶。
第二步:需要对自动驾驶汽车上的传感器进行建模。汽车上的雷达、超声波传感器、摄像头和其他传感器会观察自动驾驶汽车周围的虚拟世界,并生成仿真的传感器信号。
第三步:再传递传感器信号,以进行信号处理、传感器融合和实施控制算法。这些算法可决定是否通过加速或制动来改变汽车速度,以及是否通过转动方向盘来改变汽车方向。
第四步:控制决策被传递给汽车致动器的虚拟模型,例如可控制汽车运动的制动、 转向以及虚拟传动系统。系统仿真中的车辆动力学模块负责计算汽车的移动。它不仅可以考虑到湿滑路面条件等各种细节,而且还能准确地预测汽车的运动情况,从而使它在环境模型中具有举足轻重的地位。经过这样的流程,整个控制环路不断重复,直至完成驾驶情境的仿真。
在这种驾驶情境的系统仿真中,能方便快速地对各种参数进行测试。例如,我们可以进行假设性研究,以了解汽车的某个传感器发生意外故障时所造成的影响。此外,这种情境仿真对于软件和算法的回归测试来说非常有用。情境仿真无论在速度、成本还是精确度和自动化方面均具有极大优势,使其当之无愧地成为重复执行定义回归测试不可或缺的工具。ANSYS的仿真软件平台可将业界最佳工具连接在一起,用以执行自动驾驶汽车的高保真度情境系统仿真。
02、软件与算法的建模及研发
与硬件研发一样,仿真在软件研发中也发挥着至关重要的作用在研发和测试信号处理例行程序、传感器融合算法、物体识别功能、控制算法和人机界面(HMI)软件时,利用基于模型的软件研发技术可使软件更加稳健、安全、不易出错。由于ADAS和自动驾驶汽车系统本身就需要具备严格的安全性,汽车制造商和供应商越来越多地依照ISO 26262标准来设计汽革的主动和被动安全系统。因此ISO 26262标准在研发中也至关重要。基于模型的嵌入式软件研发技术以及经过ISO 26262认证的代码生成器能明显加快嵌入式软件的研发过程。一旦软件模型经过验证,就能确保所生成的代码不会出现错误,从而能够消除代码的单元测试工作,将软件研发的工作量减半。
ANSYS仿真平台中的SCADE(安全关键型应用研发环境)软件研发套件包含基于模型的软件研发工具和KCG代码生成器。KCG代码生成器将包含状态机和数据流的SCADE软件模型作为输入信息,即可输出等效的C代码。
03、功能安全性分析
ADAS 和自动驾驶系统显著增加了汽车系统的复杂性。它们不仅可能会造成更多故障源,还会引起更多的故障级联路径。由于 ADAS 和自动驾驶系统从本质上需要极高的安全特性,因此任何故障很容易导致严重甚至致命的后果。这类复杂系统的功能安全性分析非常繁琐,容易出错 ,而且还极易出现漏洞和缺陷。 因此 , 自动化的功能安全性分析工具对于确保 ADAS 和自动驾驶系统的安全性必不可少。
ANSYS仿真平台包含的Medini Analyze可有效实施功能安全性分析的核心工作,并且能够方便地将它们集成到产品的研发过程中。Medini Analyze依照ISO26262中针对软件控制的安全相关功能和硬件系统的标准执行安全性分析与设计,并且根据SAE J1739标准和VDA质量手册中的产晶设计和相关过程执行质量分析。它将架构和功能设计与质量、可靠性和功能安全性分析方法相结合,可用于执行驾驶情境分析、 危险和风险分析、 故障树分析(FTA)、故障模都服燥分析(FMEA)、概率分析罪日硬件故固国盼析。Medini Analyze提供完整的端到端故障追溯功能、自定义文档生成功能以及支持详细比较与合并的团队协作工具。
04、传感器性能仿真
传感器是自动驾驶汽车中需要研发的重要新组件。仿真技术可利用高保真度的物理分析来预测传感器(例如雷达、V2X天线和超声波传感器)的性能。
例如,仿真技术能预测特定驾驶情境下的雷达方向图和增益,无需成本高昂且耗时的物理测试。此外,当雷达被安装到汽车以及在雨雪天工作时 , 仿真技术还能对其性能变化进行计算,可以准确了解真实情况下的雷达工作情况,而所需的成本和时间仅为现场测试的一小部分。
ANSYS仿真平台包含一个电磁场求解器(HFSS一高规结构仿真器)和一个射线跟踪求解器(SBR+)这些求解器可用于执行汽车雷达的高保真度仿真。仿真技术能够加速雷达的研发,主要体现在以下四个方面:
(a) 隔离的雷达仿真:在自由空间中对雷达天编日天线罩进行的仿真。 在这类仿真中执行快速参数研究,以优化天糊口天线罩的 几何与材料设计。
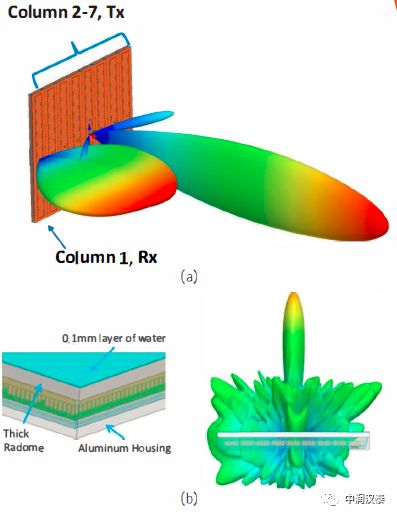
(a)雷达天线方向圄的仿真(b)天线罩对雷达天线方向圄的影响
(b) 对己安装雷达进行的仿真:对安装到汽车上的雷达进行仿真,以确定因汽车格栅或保险杠阻挡而导致的雷达性能劣化问题。
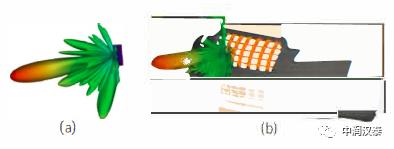
(a)自由空间内的雷达方向国(b)在相同的雷达被安装到汽车格栅之后真方向国发生的变化
(c) 对处于真实环境中的雷达进行的仿真:在包含真芭车辆、建筑物、 行人、树木的大型真实环境中天才雷达的性能进相旗.鉴于雷左 翩天线国捕入信号,国果真虔陋仿真刽罔居雷主自脱虚 拟环境中 ”观察” 到的情况来计算雷达接收天线上的输出信号。
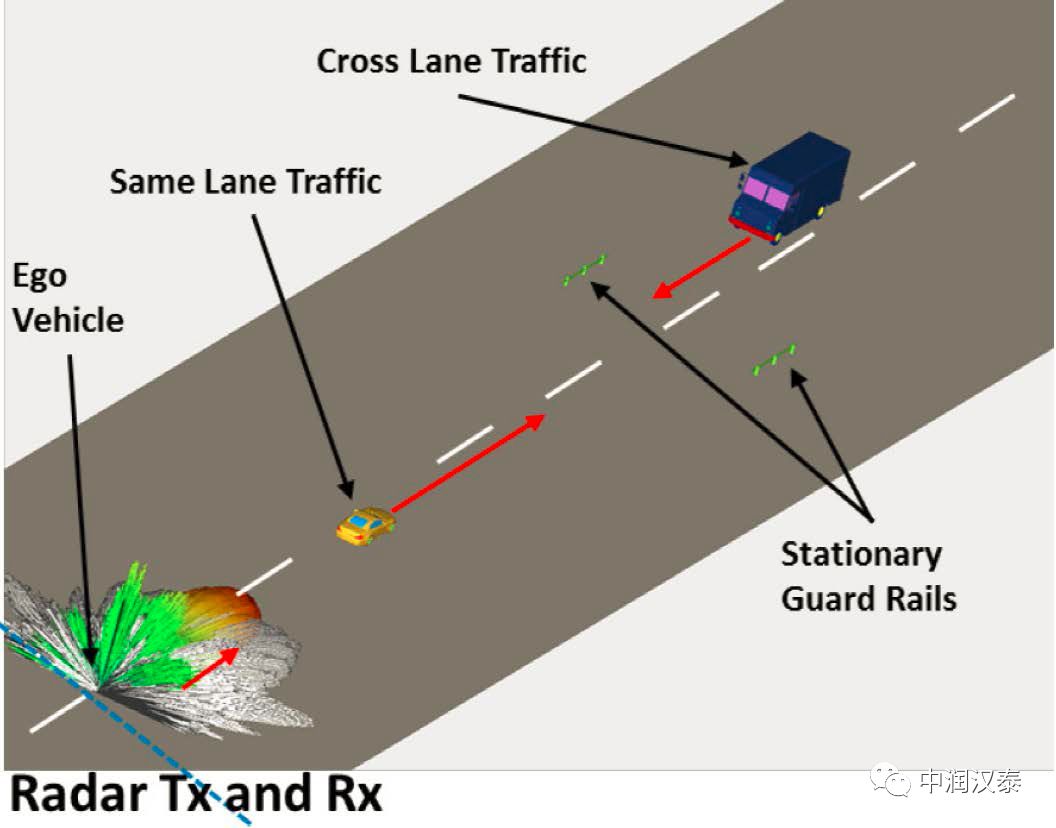
交通情境中雷达工作的高保真度物理仿真。雷达被安装在左侧的自动驾驶汽车上。 彩色的方向国用于发射,灰色的方向国用于接收。
(d)对驾驶情境中的雷达进行的仿真:使用高保真度雷达仿真的降阶模型(ROM)能够创建出快速执行的高精度雷达模型,并将其应用到驾驶情境仿真中。
相同的仿真工具还可用来研发和布局 V2X 通信天线,并确保真实情境中的信号完整性,如当真芭车辆或建筑糊阻挡了两辆车之间的信号路径时。
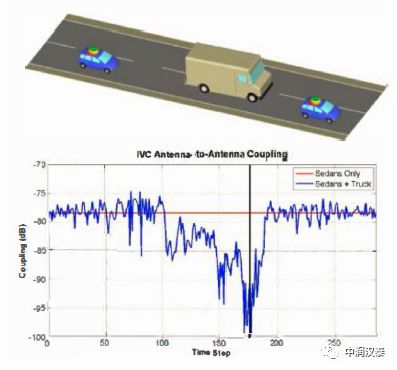
车辆与车辆之间的通信仿真。当第三辆车加入时,两辆车上天线的搞合程度会显著降低。
ANSYS仿真平台还包括用来对超声波传感器进行仿真的声学求解器。下图中的实例显示的是,当汽车朝着柱形杆倒车时,利用高保真度声波计算来仿真安装在汽车模型后面转角位置的超声波传感器的响应。
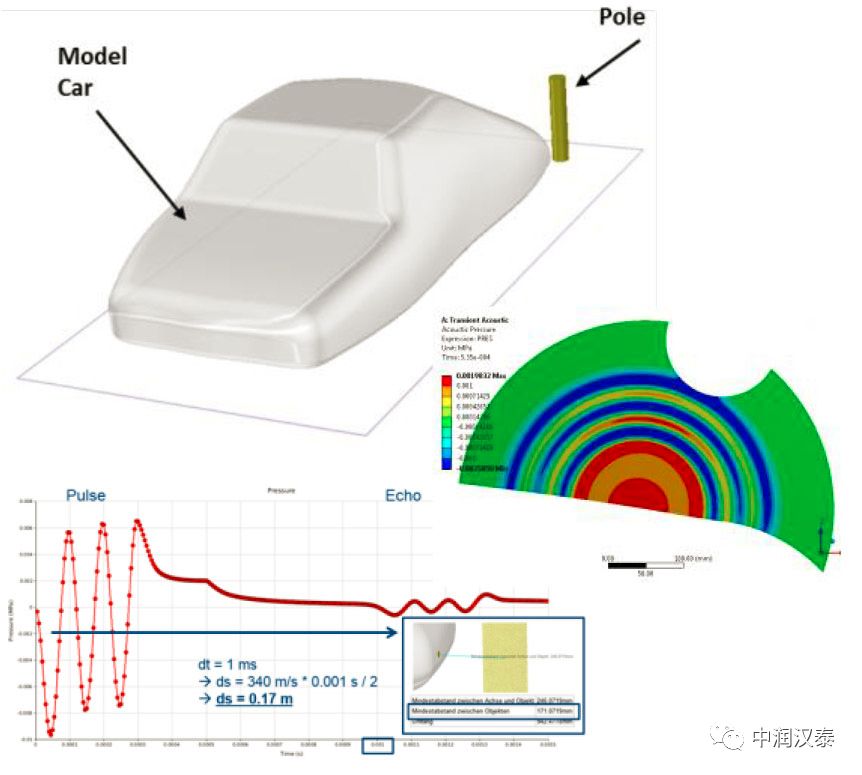
对安装在汽车模型后保险杠上的超声波传感器进行的声学仿真
05、电子硬件仿真
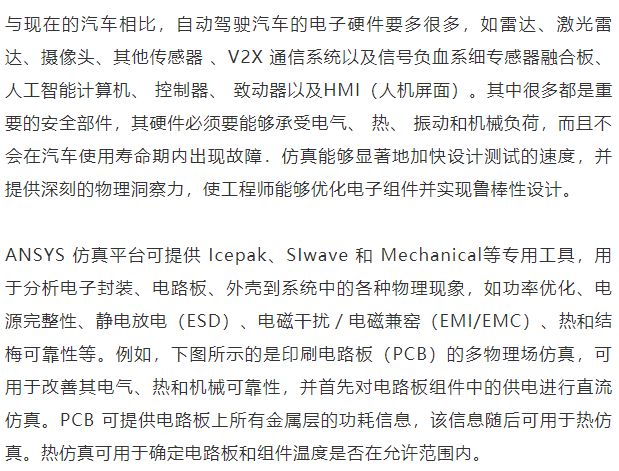
此外,热仿真还有助于确定 PCB 及组件的不同冷却方案,例如是选择风扇还是在重要部件上安装热沉。此外,利用温度场进行机械的热-应力仿真,可用于评估电路板及组件热变形,并预测温度周期变化时焊点的热疲劳。这些仿真能够确定连接位置、 加固件、 组件布局、 夹紧负荷以及其它方面,以减少电路板的热-机械应为疲劳。
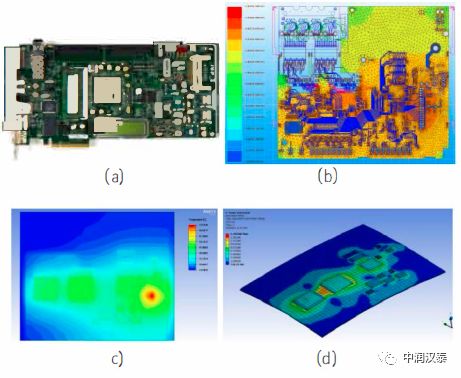
印刷电路板(PCB)上电子器件(a)可靠性、 PCB板(b)功率图(c)温度分布(d)机械应力分布进行的仿真
06、半导体仿真
ADAS和自动驾驶汽车系统要求在汽车上实时进行海量的信号处理与计算.因此,半导体企业正在研发性能更好,同时又能在能耗、结构、热可靠性及器件尺寸间实现平衡的半导体。半导体设备的几何结构不断减小,尤其是在新兴3DIC、 FinFET 和堆叠晶片架构中更是如此,因此与之相关的物理问题就产生了功耗与可靠性方面的设计挑战。仿真和建模工具可帮助芯片设计人员提高精确度和性能,从而降低电源噪声并改善IC的可靠性。通过仿真可以发现并解决关键的物理问题,如电迁移、 热效应及静电放电等。
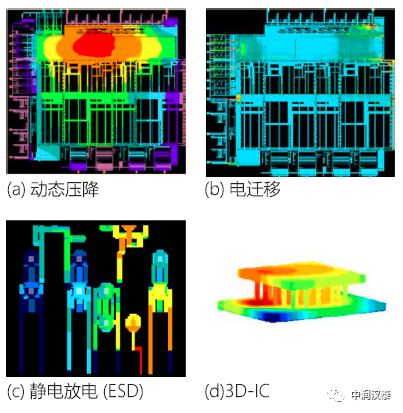
半导体仿真的各个方面

【欢迎大家提供行业新闻热点,商业合作请联系:18562613430】

推荐阅读
▼
▎本文来源:中润汉泰,智车科技(IV_Technology)整理编辑,转载请注明来源。如有侵权请第一时间联系我们。
以上是关于自动挡车带自动启停怎么等红绿灯 自动挡汽车在等红绿灯时有三种方法等待红灯的主要内容,如果未能解决你的问题,请参考以下文章