GPS捕获-Matlab代码
Posted 不知名的小咸鱼
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了GPS捕获-Matlab代码相关的知识,希望对你有一定的参考价值。
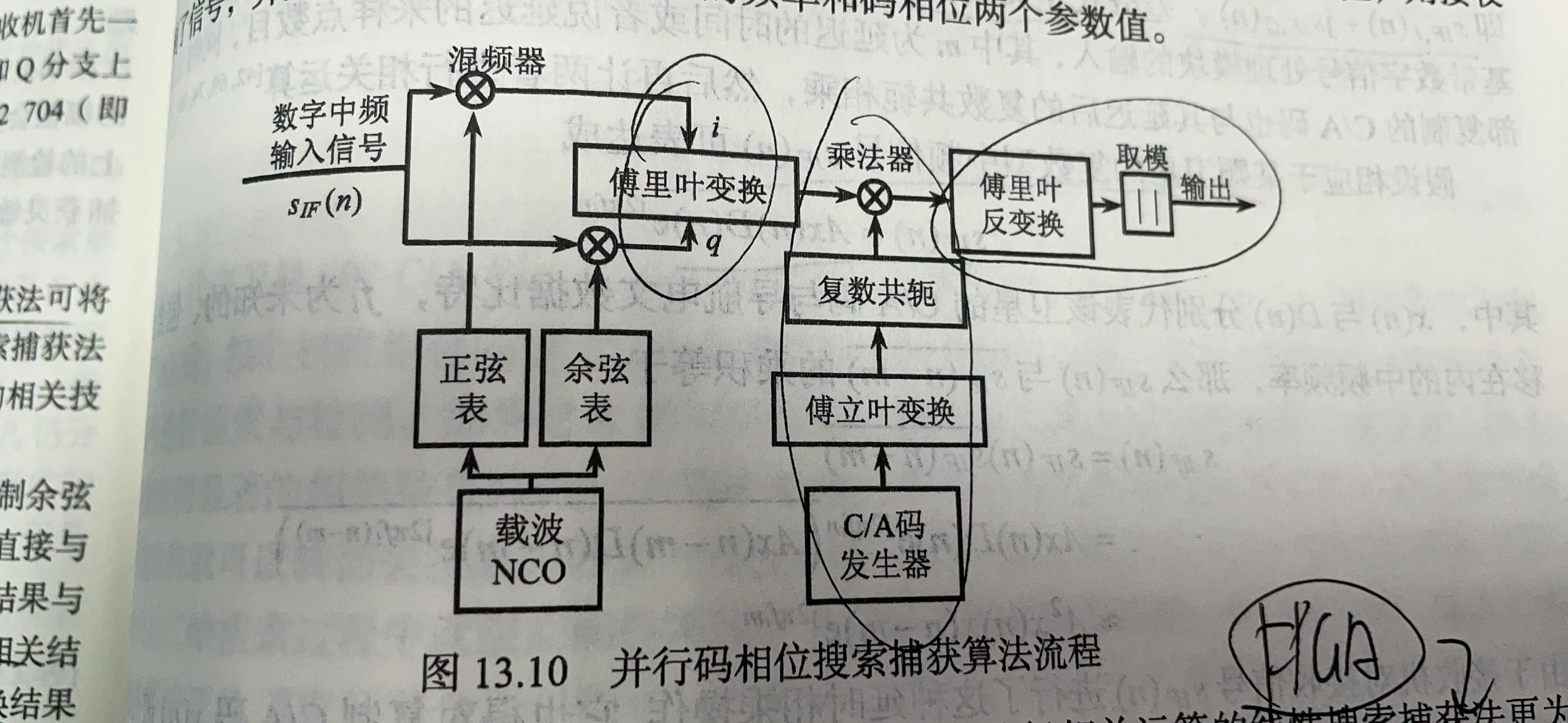
1 GPS捕获原理-简要
- 首先是正交混频,剥离载波,注意本地NCO(不懂的话可以查查DDS)生成的相位步进以及相位累加器的溢出处理,没处理好会导致无法出现相关峰值,CA码不做介绍(这个看谢钢那本GPS原理和接收机设计这本书就可以了),这个没什么技术难度。然后,将CA码重采样,这里重采样为16倍码率,由于只是理论验证,且这里相关耗时并不算多,耗时最多的是正交混频和重采样。最后利用matlab的xcorr做1ms并行相关,20ms相干积分,以及寻找大于阈值的相关峰值,即可实现捕获,但由于时间较短,不能对弱信号进行捕获。
- 这里采用的是20ms的实测中频数据,参数如下: Fs = 16.386E6 Hz 中频采样率 Fc = 4.092E6
Hz 理论中频 Fcc = 1.023E6 bps 码片速率 信号类型: GPS L1
Matlab代码
%% function : aquire gps signal
%% date : 20210507
%% author: skignwei
%%%%%%%%%%%%%%55555555555555555555555555%%%%%%%%%
% PRN Doppler
% 21 3740
%%%%%%%%%5555555555555555555555555%%%%%%%%%%%%5555
clear
close all
filepath = 'OutCACodeResult/';
filename1 = 'GPSCACode.txt';
%% parameter
Fs = 16.368E6; %采样率
Fc = 4.092E6; %理论中频数据
% Fs = 30.69E6; %采样率
% Fc = 8.184E6; %理论中频数据
Fcc = 1.023E6; %码率
GPS_CACODE_NUM = 1023;
initDopp = -500; %Hz
slew_count = Fs/Fcc; %%本地码率倍数
FFT_N = 4092;
FFT_Len = Fs/1E3;
%% read data
gpsIFdata = importdata('gps_data_20ms.mat');
gpsIFdata = gpsIFdata';
% gpsIFdata = importdata('IFdata3.txt',',');
f1 = [filepath,filename1];
d1= importdata(f1);
%% init parameter
CarrierLoop(Fs,Fc);
Set_CarrierFreq(initDopp,Fc,Fs);
CodeLoop(19,d1); %GPS19
Move_Chips(0);
%%
L = length(gpsIFdata);
temp_Coh_PRN = zeros(FFT_Len*2-1,32); %ALLGPS
FFTCode_Signal = zeros(FFT_Len,1);
FFTCode_CA = zeros(FFT_Len,1);
IFData = complex(gpsIFdata(:,1),0);
global reg_aquired regcount
reg_aquired = zeros(200,2);
regcount = 1;
%%并行码捕获
fcount = 1;
for m = -37.4 %%-4000Hz~4000Hz
for j = 21
% if j== 21 || j==15 || j==27 || j==9
% continue
% end
% init parameter
tic
FFT_count = 1;
FFT_Cohcount = 1;
CarrierLoop(Fs,Fc);
initDopp = m*100;
Set_CarrierFreq(initDopp,Fc,Fs);
CodeLoop(j,d1); %GPS 1-32
Move_Chips(0);
temp_Coh = zeros(FFT_Len*2-1,1);
for i = 1:L
% IFData = complex(gpsIFdata(i,1),gpsIFdata(i,2));
%载波剥离,暂时不考虑多普勒
ComplexData = ComplexDDC(IFData(i));
%%
%码剥离,暂时不考虑多普勒
[tempchar,Code_Signal, Code_CA] = Code_Correlate(ComplexData,slew_count);
if tempchar == 1
FFTCode_Signal(FFT_count,1) = Code_Signal;
FFTCode_CA(FFT_count,1) = complex(Code_CA,0);
if FFT_count < FFT_Len
FFT_count= FFT_count +1;
else
FFT_count = 1;
% tic
tempFFTCode_outVec = xcorr(FFTCode_Signal,FFTCode_CA,'coeff'); %归一化结果,并行码相关
% toc
%%相干积分
temp_Coh = temp_Coh + tempFFTCode_outVec;
FFT_Cohcount = FFT_Cohcount + 1;
if FFT_Cohcount >= 21
disp("处理结束")
disp(j)
end
% break;
end
end
end
temp_Coh_PRN(:,j) = temp_Coh;
toc
end
% result
temp_Coh_PRNm = abs(temp_Coh_PRN);
%%search
aquiredresult = aquire_Prn(initDopp,temp_Coh_PRNm);
%figure
figure(fcount)
fcount= fcount + 1;
plot(temp_Coh_PRNm,'DisplayName','temp_Coh_PRNm')
disp("inidopp")
disp(initDopp)
end
%% func: 载波剥离
%% return : 正交剥离后的结果
%%//-----------------------中频数据下变频----------------------------//
function Complexdata = ComplexDDC(IFData)
global costable sintable
global Carrier_phase Carrier_phaseStep
%%Multiply 小心这里没处理好
Carrier_phase = Carrier_phase + Carrier_phaseStep; %相位步进
if Carrier_phase >= pow2(32)
Carrier_phase = mod(Carrier_phase,pow2(32));
end
phaseIndex = bitshift(Carrier_phase,-27,'uint32');
phaseIndex = mod(phaseIndex,32)+1;
%index is different to cpp
TempComplexData = complex(costable(phaseIndex), sintable(phaseIndex)); %%正频率
TempComplexData = IFData * TempComplexData;
TempComplexData = complex(bitshift(real(TempComplexData),-4,'int64'), bitshift(imag(TempComplexData),-4,'int64'));
%%return
Complexdata = TempComplexData;
end
%% //-----------------------载波频率设定----------------------------//
function Set_CarrierFreq(DopplerFreq,GPS_FREQ_COMPENSATE,SystemClockFre)
global Carrier_phaseStep
double tempData;
tempData = DopplerFreq + GPS_FREQ_COMPENSATE;
tempData = pow2(32) * tempData / SystemClockFre;
Carrier_phaseStep = floor(tempData);
end
%% //-----------------------初始 载波频率设定----------------------------//
function CarrierLoop(SystemClockFre,GPS_FREQ_COMPENSATE)
global costable sintable
global Carrier_phase Carrier_phaseStep
%% 正弦波表
costable = [252, 247, 233, 210, 178, 140, 96, 49, 0, -49, -96, -140, -178, -210, -233, -247, -252, -247, -233, -210, -178, -140, -96, -49, 0, 49, 96, 140, 178, 210, 233, 247 ];
sintable = [ 0, 49, 96, 140, 178, 210, 233, 247, 252, 247, 233, 210, 178, 140, 96, 49, 0, -49, -96, -140, -178, -210, -233, -247, -252, -247, -233, -210, -178, -140, -96, -49 ];
double tempData;
Carrier_phase = 0;
%% 计算标称中频所对应的M
tempData = GPS_FREQ_COMPENSATE;
tempData = pow2(32) * tempData / SystemClockFre;
Carrier_phaseStep = round(tempData);
end
%% func: 码剥离
%% return : 码剥离后的结果
%% 并行相关器
%% result 相关结果
function [temp_char,FFTCode_Signal, FFTCode_CA]= Code_Correlate(DDCData,slew_count)
global Code_phaseIndex
global CA_code count_cc
global div_count
div_count = div_count + 1;
if div_count>0
div_count =0;
FFTCode_Signal = DDCData;
%%重采样
FFTCode_CA = CA_code(Code_phaseIndex);
if count_cc < slew_count
count_cc = count_cc + 1;
else
count_cc = 1;
Code_phaseIndex = Code_phaseIndex+1;
if Code_phaseIndex >1023
Code_phaseIndex = 1;
end
end
temp_char = 1;
else
temp_char = 0;
FFTCode_Signal = 0;
FFTCode_CA = 0;
end
end
%% 码片搜索设定
function Move_Chips(chip)
global CurrentCodePhase slewCount
tempdata = chip - CurrentCodePhase;
CurrentCodePhase = chip;
if tempdata >= 0
slewCount = tempdata;
else
slewCount = 16 * GPS_CACODE_NUM + tempdata; %16倍码率
end
end
%% 初始设定
function CodeLoop(PRN,CA)
global CurrentCodePhase Code_phaseIndex
global CA_code count_cc
global div_count
div_count =0;
CurrentCodePhase = 0;
Code_phaseIndex = 1;
count_cc = 1;
CA_code = CA(:,PRN);
end
%% 捕获结果
function aquiredresult = aquire_Prn(dopp,recorr)
global reg_aquired regcount
b = max(recorr,[],1); %%按列
index = find(b>0.3); %%捕获阈值
if isempty(index)
else
L =length(index);
PRN = index;
initdopp = dopp;
for i = 1:L
reg_aquired(regcount,:) = [PRN(i),initdopp];
regcount = regcount+1;
end
end
aquiredresult = reg_aquired;
end
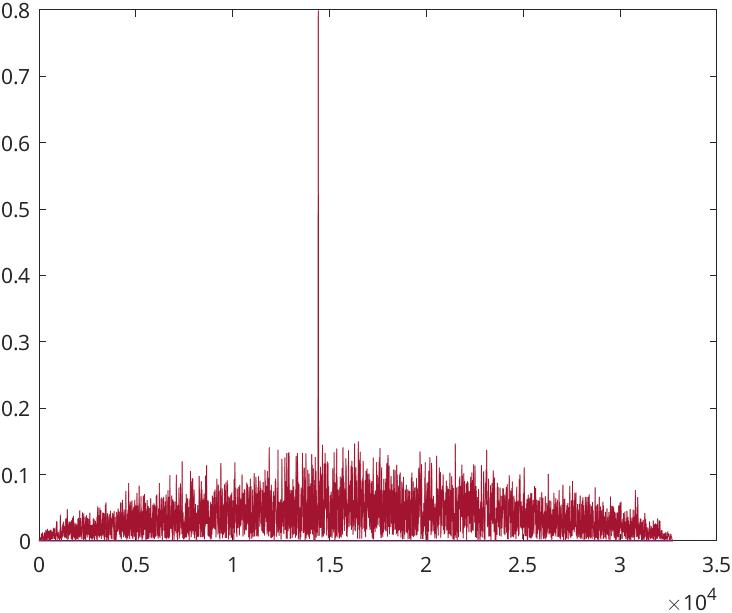
捕获结果
这里给出GPS21的捕获结果,因为matlab的for循环是很耗时间的,为了逻辑上和实际近似,没有采用矩阵运算,所以做一次捕获费时12s(我的电脑配置还算好的)。后面就懒得移植C++了,毕竟我要画图,画图,C++用多线程估计1秒不到就可以处理晚了吧。我试了一下,大概4小时完成一次GPS1-32的并行捕获,多普勒范围是-4000-4000Hz,步进200Hz,其实100Hz会好一些。
数据
想要数据可以私戳我,我个人不太喜欢传到网盘
以上是关于GPS捕获-Matlab代码的主要内容,如果未能解决你的问题,请参考以下文章
GPS仿真基于matlab GPS信号捕获跟踪定位仿真含Matlab源码 1960期
雷达通信基于matlab间接卡尔曼滤波IMU与GPS融合含Matlab源码 1360期