《ROS机器人开发实践》第6.2.4节“在rviz中显示模型”问题总结
Posted 我是病毒和BUG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《ROS机器人开发实践》第6.2.4节“在rviz中显示模型”问题总结相关的知识,希望对你有一定的参考价值。
输入$roslaunch mbot_description display_mbot_base_urdf.launch后,出现以下错误。
解决方法:在终端输入$ source catkin_ws/devel/setup.bash,在运行launch文件。
如果在Rviz中模型显示不完整,可如下图设置
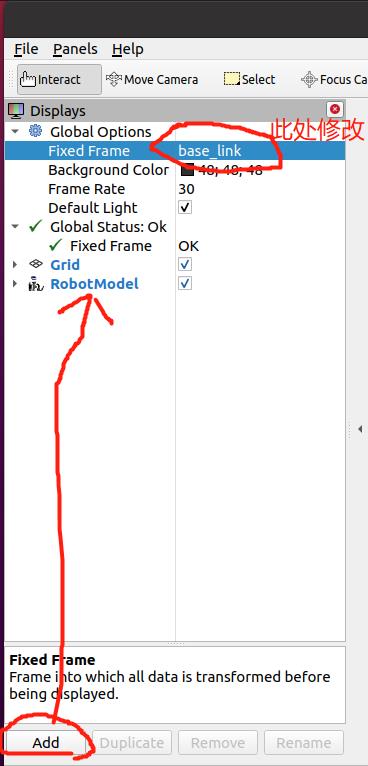
便可以解决。
补充:运行
roslaunch mrobot_description display_mrobot_chassis_urdf.launch
出现

解决方法:将mrobot_description功能包下launch文件夹中display_mrobot_chassis_urdf.launch文件的robot_state_publisher节点中:type=“state_publisher” 改为 type=“robot_state_publisher”。
再次运行
roslaunch mrobot_description display_mrobot_chassis_urdf.launch
————————————————
补充部分原文链接:https://blog.csdn.net/weixin_43467428/article/details/114824102
更新——
问题:运行launch文件后,无法打开名为“joint_state_publisher”的UI。
原因如图

解决方法:把display_mrobot_chassis_urdf.launch文件中的joint_state_publisher节点下的节点名改为

即可解决问题。
以上是关于《ROS机器人开发实践》第6.2.4节“在rviz中显示模型”问题总结的主要内容,如果未能解决你的问题,请参考以下文章