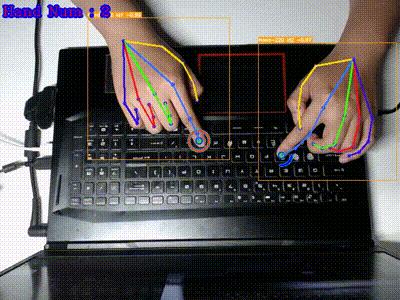
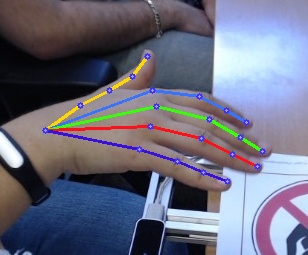
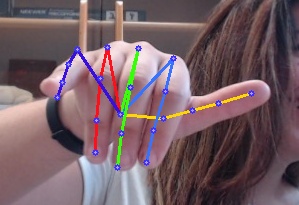
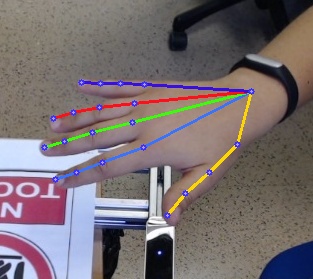
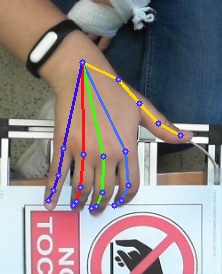
基于深度学习的手部21类关键点检测
Posted 踟蹰横渡口,彳亍上滩舟。
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于深度学习的手部21类关键点检测相关的知识,希望对你有一定的参考价值。
基于深度学习的手部21类关键点检测
基于深度学习的人体关键点检测
开发环境
* Python 3.7
* PyTorch >= 1.5.1
* opencv-python
数据源
- 普通USB彩色(RGB)网络摄像头
- 已经存储下来的视频或者图片
数据集
本项目数据集百度网盘下载地址:下载地址
该数据集包括网络图片及数据集<<Large-scale Multiview 3D Hand Pose Dataset>>筛选动作重复度低的部分图片,进行制作(如有侵权请联系删除),共49062个样本。
<<Large-scale Multiview 3D Hand Pose Dataset>>数据集,其官网地址 http://www.rovit.ua.es/dataset/mhpdataset/
感谢《Large-scale Multiview 3D Hand Pose Dataset》数据集贡献者:Francisco Gomez-Donoso, Sergio Orts-Escolano, and Miguel Cazorla. “Large-scale Multiview 3D Hand Pose Dataset”. ArXiv e-prints 1707.03742, July 2017.
本项目训练测试数据集、训练测试代码和演示demo
打包下载地址:下载地址
本项目demo

目前支持的模型 (backbone)
- resnet18 & resnet34 & resnet50 & resnet101
- squeezenet1_0 & squeezenet1_1
- ShuffleNet & ShuffleNetV2
- MobileNetV2
- rexnetv1
- shufflenet_v2_x1_5 ,shufflenet_v2_x1_0 , shufflenet_v2_x2_0 (torchvision 版本)
预训练模型
- 预训练模型:代码下载地址中,见文件夹W
模型训练
- 运行命令: python train.py
#-*-coding:utf-8-*-
import os
import argparse
import torch
import torch.nn as nn
import torch.optim as optim
import sys
from utils.model_utils import *
from utils.common_utils import *
from hand_data_iter.datasets import *
from models.resnet import resnet18,resnet34,resnet50,resnet101
from models.squeezenet import squeezenet1_1,squeezenet1_0
from models.shufflenetv2 import ShuffleNetV2
from models.shufflenet import ShuffleNet
from models.mobilenetv2 import MobileNetV2
from models.rexnetv1 import ReXNetV1
from torchvision.models import shufflenet_v2_x1_5 ,shufflenet_v2_x1_0 , shufflenet_v2_x2_0
from loss.loss import *
import cv2
import time
import json
from datetime import datetime
import random
def trainer(ops,f_log):
try:
os.environ['CUDA_VISIBLE_DEVICES'] = ops.GPUS
if ops.log_flag:
sys.stdout = f_log
set_seed(ops.seed)
#---------------------------------------------------------------- 构建模型
if ops.model == 'resnet_50':
model_ = resnet50(pretrained = True,num_classes = ops.num_classes,img_size = ops.img_size[0],dropout_factor=ops.dropout)
elif ops.model == 'resnet_18':
model_ = resnet18(pretrained = True,num_classes = ops.num_classes,img_size = ops.img_size[0],dropout_factor=ops.dropout)
elif ops.model == 'resnet_34':
model_ = resnet34(pretrained = True,num_classes = ops.num_classes,img_size = ops.img_size[0],dropout_factor=ops.dropout)
elif ops.model == 'resnet_101':
model_ = resnet101(pretrained = True,num_classes = ops.num_classes,img_size = ops.img_size[0],dropout_factor=ops.dropout)
elif ops.model == "squeezenet1_0":
model_ = squeezenet1_0(pretrained=True, num_classes=ops.num_classes,dropout_factor=ops.dropout)
elif ops.model == "squeezenet1_1":
model_ = squeezenet1_1(pretrained=True, num_classes=ops.num_classes,dropout_factor=ops.dropout)
elif ops.model == "shufflenetv2":
model_ = ShuffleNetV2(ratio=1., num_classes=ops.num_classes, dropout_factor=ops.dropout)
elif ops.model == "shufflenet_v2_x1_5":
model_ = shufflenet_v2_x1_5(pretrained=False,num_classes=ops.num_classes)
elif ops.model == "shufflenet_v2_x1_0":
model_ = shufflenet_v2_x1_0(pretrained=False,num_classes=ops.num_classes)
elif ops.model == "shufflenet_v2_x2_0":
model_ = shufflenet_v2_x2_0(pretrained=False,num_classes=ops.num_classes)
elif ops.model == "shufflenet":
model_ = ShuffleNet(num_blocks = [2,4,2], num_classes=ops.num_classes, groups=3, dropout_factor = ops.dropout)
elif ops.model == "mobilenetv2":
model_ = MobileNetV2(num_classes=ops.num_classes , dropout_factor = ops.dropout)
elif ops.model == "ReXNetV1":
model_ = ReXNetV1(num_classes=ops.num_classes , width_mult=0.9, depth_mult=1.0, dropout_factor = ops.dropout)
else:
print(" no support the model")
use_cuda = torch.cuda.is_available()
device = torch.device("cuda:0" if use_cuda else "cpu")
model_ = model_.to(device)
# print(model_)# 打印模型结构
# Dataset
dataset = LoadImagesAndLabels(ops= ops,img_size=ops.img_size,flag_agu=ops.flag_agu,fix_res = ops.fix_res,vis = False)
print("handpose done")
print('len train datasets : %s'%(dataset.__len__()))
# Dataloader
dataloader = DataLoader(dataset,
batch_size=ops.batch_size,
num_workers=ops.num_workers,
shuffle=True,
pin_memory=False,
drop_last = True)
# 优化器设计
optimizer_Adam = torch.optim.Adam(model_.parameters(), lr=ops.init_lr, betas=(0.9, 0.99),weight_decay=1e-6)
# optimizer_SGD = optim.SGD(model_.parameters(), lr=ops.init_lr, momentum=ops.momentum, weight_decay=ops.weight_decay)# 优化器初始化
optimizer = optimizer_Adam
# 加载 finetune 模型
if os.access(ops.fintune_model,os.F_OK):# checkpoint
chkpt = torch.load(ops.fintune_model, map_location=device)
model_.load_state_dict(chkpt)
print('load fintune model : {}'.format(ops.fintune_model))
print('/**********************************************/')
# 损失函数
if ops.loss_define == 'mse_loss':
criterion = nn.MSELoss(reduce=True, reduction='mean')
elif ops.loss_define == 'adaptive_wing_loss':
criterion = AdaptiveWingLoss()
step = 0
idx = 0
# 变量初始化
best_loss = np.inf
loss_mean = 0. # 损失均值
loss_idx = 0. # 损失计算计数器
flag_change_lr_cnt = 0 # 学习率更新计数器
init_lr = ops.init_lr # 学习率
epochs_loss_dict = {}
for epoch in range(0, ops.epochs):
if ops.log_flag:
sys.stdout = f_log
print('\\nepoch %d ------>>>'%epoch)
model_.train()
# 学习率更新策略
if loss_mean!=0.:
if best_loss > (loss_mean/loss_idx):
flag_change_lr_cnt = 0
best_loss = (loss_mean/loss_idx)
else:
flag_change_lr_cnt += 1
if flag_change_lr_cnt > 50:
init_lr = init_lr*ops.lr_decay
set_learning_rate(optimizer, init_lr)
flag_change_lr_cnt = 0
loss_mean = 0. # 损失均值
loss_idx = 0. # 损失计算计数器
for i, (imgs_, pts_) in enumerate(dataloader):
# print('imgs_, pts_',imgs_.size(), pts_.size())
if use_cuda:
imgs_ = imgs_.cuda() # pytorch 的 数据输入格式 : (batch, channel, height, width)
pts_ = pts_.cuda()
output = model_(imgs_.float())
if ops.loss_define == 'wing_loss':
loss = got_total_wing_loss(output, pts_.float())
else:
loss = criterion(output, pts_.float())
loss_mean += loss.item()
loss_idx += 1.
if i%10 == 0:
loc_time = time.strftime("%Y-%m-%d %H:%M:%S", time.localtime())
print(' %s - %s - epoch [%s/%s] (%s/%s):'%(loc_time,ops.model,epoch,ops.epochs,i,int(dataset.__len__()/ops.batch_size)),\\
'Mean Loss : %.6f - Loss: %.6f'%(loss_mean/loss_idx,loss.item()),\\
' lr : %.8f'%init_lr,' bs :',ops.batch_size,\\
' img_size: %s x %s'%(ops.img_size[0],ops.img_size[1]),' best_loss: %.6f'%best_loss, " {}".format(ops.loss_define))
# 计算梯度
loss.backward()
# 优化器对模型参数更新
optimizer.step()
# 优化器梯度清零
optimizer.zero_grad()
step += 1
#set_seed(random.randint(0,65535))
torch.save(model_.state_dict(), ops.model_exp + '{}-size-{}-loss-{}-model_epoch-{}.pth'.format(ops.model,ops.img_size[0],ops.loss_define,epoch))
except Exception as e:
print('Exception : ',e) # 打印异常
print('Exception file : ', e.__traceback__.tb_frame.f_globals['__file__'])# 发生异常所在的文件
print('Exception line : ', e.__traceback__.tb_lineno)# 发生异常所在的行数
if __name__ == "__main__":
parser = argparse.ArgumentParser(description=' Project Hand Train')
parser.add_argument('--seed', type=int, default = 126673,
help = 'seed') # 设置随机种子
parser.add_argument('--model_exp', type=str, default = './model_exp',
help = 'model_exp') # 模型输出文件夹
parser.add_argument('--model', type=str, default = 'shufflenet_v2_x2_0',
help = '''model : resnet_34,resnet_50,resnet_101,squeezenet1_0,squeezenet1_1,shufflenetv2,shufflenet,mobilenetv2
shufflenet_v2_x1_5 ,shufflenet_v2_x1_0 , shufflenet_v2_x2_0,ReXNetV1''') # 模型类型
parser.add_argument('--num_classes', type=int , default = 42,
help = 'num_classes') # landmarks 个数*2
parser.add_argument('--GPUS', type=str, default = '0',
help = 'GPUS') # GPU选择
parser.add_argument('--train_path', type=str,
default = "./handpose_datasets_v1/",
help = 'datasets')# 训练集标注信息
parser.add_argument('--pretrained', type=bool, default = True,
help = 'imageNet_Pretrain') # 初始化学习率
parser.add_argument('--fintune_model', type=str, default = 'None',
help = 'fintune_model') # fintune model
parser.add_argument('--loss_define', type=str, default = 'adaptive_wing_loss',
help = 'define_loss : wing_loss, mse_loss ,adaptive_wing_loss') # 损失函数定义
parser.add_argument('--init_lr', type=float, default = 1e-3,
help = 'init learning Rate') # 初始化学习率
parser.add_argument('--lr_decay', type=float, default = 0.1,
help = 'learningRate_decay') # 学习率权重衰减率
parser.add_argument('--weight_decay', type=float, default = 1e-6,
help = 'weight_decay') # 优化器正则损失权重
parser.add_argument('--momentum', type=float, default = 0.9,
help = 'momentum') # 优化器动量
parser.add_argument('--batch_size', type=int, default = 16,
help = 'batch_size') # 训练每批次图像数量
parser.add_argument('--dropout', type=float, default = 0.5,
help = 'dropout') # dropout
parser.add_argument('--epochs', type=int, default = 3000,
help = 'epochs') # 训练周期
parser.add_argument('--num_workers', type=int, default = 10,
help = 'num_workers') # 训练数据生成器线程数
parser.add_argument('--img_size', type=tuple , default = (256,256),
help = 'img_size') # 输入模型图片尺寸
parser.add_argument('--flag_agu', type=bool , default = True,
help = 'data_augmentation') # 训练数据生成器是否进行数据扩增
parser.add_argument('--fix_res', type=bool , default = False,
help = 'fix_resolution') # 输入模型样本图片是否保证图像分辨率的长宽比
parser.add_argument('--clear_model_exp', type=bool, default = False,
help = 'clear_model_exp') # 模型输出文件夹是否进行清除
parser.add_argument('--log_flag', type=bool, default = False,
help = 'log flag') # 是否保存训练 log
#--------------------------------------------------------------------------
args = parser.parse_args()# 解析添加参数
#--------------------------------------------------------------------------
mkdir_(args.model_exp, flag_rm=args.clear_model_exp)
loc_time = time.localtime()
args.model_exp = args.model_exp + '/' + time.strftime("%Y-%m-%d_%H-%M-%S", loc_time)+'/'
mkdir_(args.model_exp, flag_rm=args.clear_model_exp)
f_log = None
if args.log_flag:
f_log = open(args.model_exp+'/train_{}.log'.format(time.strftime("%Y-%m-%d_%H-%M-%S",loc_time)), 'a+')
sys.stdout = f_log
print('---------------------------------- log : {}'.format(time.strftime("%Y-%m-%d %H:%M:%S", loc_time)))
print('\\n/******************* {} ******************/\\n'.format(parser.description))
unparsed = vars(args) # parse_args()方法的返回值为namespace,用vars()内建函数化为字典
for key in unparsed.keys():
print('{} : {}'.format(key,unparsed[key]))
unparsed['time'] = time.strftime("%Y-%m-%d %H:%M:%S", loc_time)
fs = open(args.model_exp+'train_ops.json',"w",encoding='utf-8')
json.dump(unparsed,fs,ensure_ascii=False,indent = 1)
fs.close()
trainer(ops = args,f_log = f_log)# 模型训练
[OpenCV实战]12 使用深度学习和OpenCV进行手部关键点检测
机器学习实验四基于Logistic Regression二分类算法实现手部姿态识别