2d Laser 和 camera 标定工具原理及使用方法
Posted 白巧克力亦唯心
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2d Laser 和 camera 标定工具原理及使用方法相关的知识,希望对你有一定的参考价值。
2d 激光和相机之间的标定早在 04 年就出了成熟的论文和方法,17 年 ICCV, IROS,今年 IROS 等依然还有论文产出,具体的论文列表可以参考我的《论文阅读整理》博客。本篇博客主要讲述 04 年方法的原理以及代码的实现, 代码开放在我们的github上,在自己机器人上采集了多次数据进行标定,标定结果在 1cm 内浮动,均值附近正负几毫米。
标定原理
准备材料:标定板一个(平板上贴有棋盘格或者二维码,我使用的为 apriltag,apriltag 使用我们代码文件夹里提供的,直接打印成 A4 大小,特别注意自己在网上下载的 apriltag 大小各异,注意测量 apritag 的尺寸,我们的为0.1612m),已经标定好内参数的相机一个。
标定原理如下图所示,相机通过二维码估计标定板平面在相机坐标系下的平面方程,由于激光点云落在平面上,将点云通过激光坐标系到相机坐标系的外参数
T
c
l
T_cl
Tcl 转换到相机坐标系,构建点到平面的距离作为误差,使用非线性最小二乘进行求解。
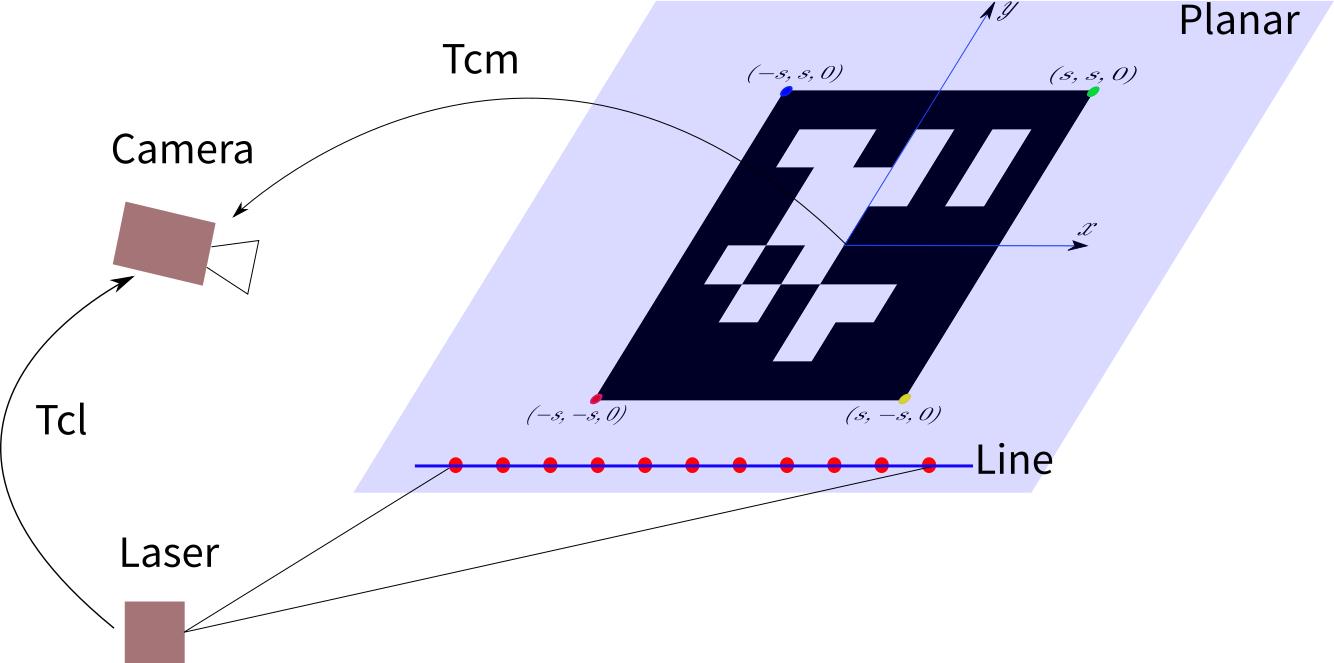
标定板平面在相机坐标系下的求解
假设通过二维码求解 Pnp 已经知道二维码到相机坐标系的变换矩阵
T
c
m
T_cm
Tcm, 平面方程在二维码坐标系下为
P
m
=
[
0
,
0
,
1
,
0
]
⊤
P_m = [0,0,1,0]^\\top
Pm=[0,0,1,0]⊤。那么平面方程在相机坐标系为
P
c
=
(
T
c
m
−
1
)
⊤
∗
P
m
P_c=(T^-1_cm)^\\top*P_m
Pc=(Tcm−1)⊤∗Pm平面方程在不同坐标系下的变换的公式推导,可以参看 stackoverflow 上别人的回答。
误差方程的构建和求解
平面在相机坐标系下的方程知道后,就能很快构建误差方程, 首先将激光点 p l i p^i_l pli 从激光坐标系转换到相机坐标系。 p c i = T c l ∗ p l i p^i_c = T_cl * p^i_l pci=Tcl∗pli 然后,利用点到平面的距离方程构建误差, r i = d ( p c i , P c ) r_i = d(p^i_c,P_c) ri=d(pci,Pc) 使用 ceres 对一堆点的误差进行非线性最小二乘求解。
改进
实际上标定时会采集很多时刻的数据,激光点云数据量加起来可能会很多,直接丢给 ceres 求解速度慢。对于某一时刻,由于点云噪声通常在几厘米跳动,所以我们可以先对该时刻的激光数据进行直线拟合,然后只利用直线上的两个点来构建约束,这样就能减少 ceres 的计算量。
标定工具的使用 (具体操作细节请从参考 github readme)
最近升级了代码,使用更加方便,标定结果更加稳定。主要改动如下:
- 能自动检测落在标定板上的激光点。
- apriltag 的代码支持利用多个 marker 估计相机到标定板之间的外参数 T c m T_cm Tcm。
1. 数据的采集示例
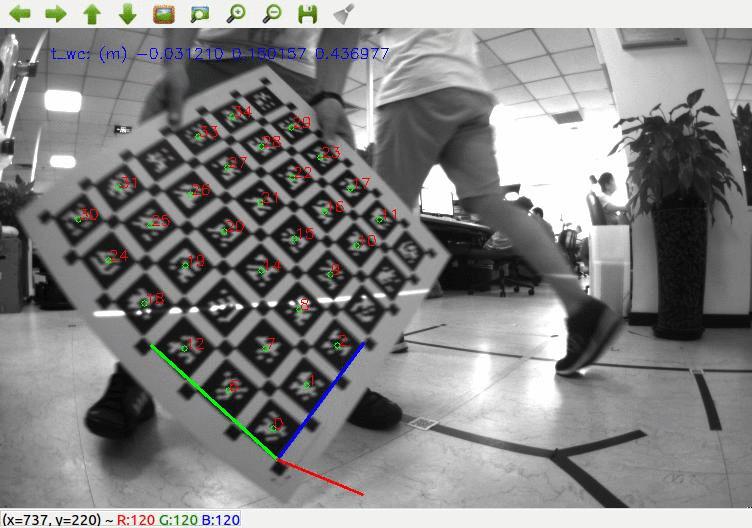
2. 标定结果的评估示例

以上是关于2d Laser 和 camera 标定工具原理及使用方法的主要内容,如果未能解决你的问题,请参考以下文章
2d Laser 和 Odomter 内外参数标定工具原理及使用方法
2d Laser 和 Odomter 内外参数标定工具原理及使用方法
摄像头Camera 标定Calibration原理Theory