全景拼接学习-原理篇 相机标定 内参和外参
Posted kekeoutlook
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了全景拼接学习-原理篇 相机标定 内参和外参相关的知识,希望对你有一定的参考价值。
https://blog.csdn.net/u013498583/article/details/71404323
1原理
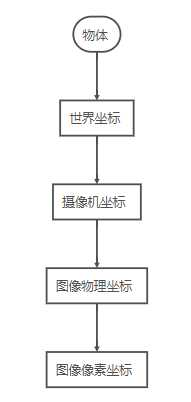
1-1成像过程
摄像机的成像过程主要是主要涉及到几个坐标系的变换(具体过程可以参考相机模型):
从摄像机成像畸变的产生于是其“天生”的,不可避免的,这主要是由于透镜成像原理导致的。其畸变的原理可以参考相机模型)。
1-2校正原理
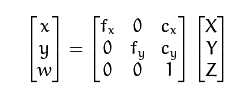
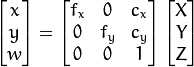
相机内参 像素的物理尺寸和焦距
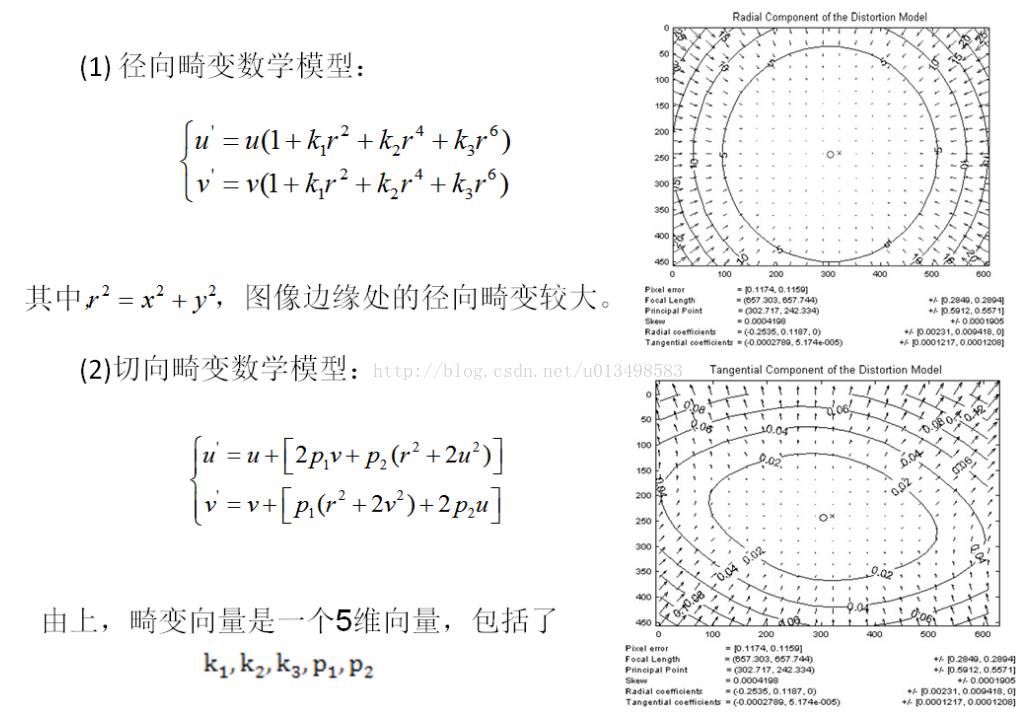
相机的畸变矫正
图像像素坐标系
(uOv坐标系) 下的无畸变坐标 (U, V),经过 径向畸变 和 切向畸变 后落在了uOv坐标系 的 (Ud, Vd) 上。即就是说,真实图像 imgR 与 畸变图像 imgD 之间的关系为:
imgR(U, V) = imgD(Ud, Vd)
最终公式

其中,[x′,y′]为畸变后的位置,[x,y]为畸变前的位置,[ki,pi]为畸变系数。当然,其实畸变系数远远不止这么四个,但通常情况下可以仅考虑这四个。
2标定过程
2-1 opencv自带的源码
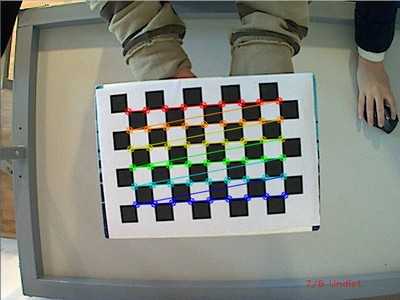
2-2 使用matlab
最终获取标定文件
XML/YAML file
Camera_Matrix type_id="opencv-matrix"> <rows>3</rows> <cols>3</cols> <dt>d</dt> <data> 6.5746697944293521e+002 0. 3.1950000000000000e+002 0. 6.5746697944293521e+002 2.3950000000000000e+002 0. 0. 1.</data></Camera_Matrix> <Distortion_Coefficients type_id="opencv-matrix"> <rows>5</rows> <cols>1</cols> <dt>d</dt> <data> -4.1802327176423804e-001 5.0715244063187526e-001 0. 0. -5.7843597214487474e-001</data></Distortion_Coefficients>
畸变矫正 Distortion_Coefficients 5个失真参数

内参矩阵 Camera_Matrix 新的变换矩阵
 联合
联合
6.校正
得到out_camera_data.xml文件后,我们可以直接使用该配置文件进行校正。
#include <opencv2/opencv.hpp>
#include <opencv2/calib3d/calib3d.hpp>
using namespace std;
using namespace cv;
/**
* @主函数
*/
int main( int argc, char** argv )
{
/// 读取一副图片,不改变图片本身的颜色类型(该读取方式为DOS运行模式)
Mat src = imread( argv[1], 1 );
Mat distortion = src.clone();
Mat camera_matrix = Mat(3, 3, CV_32FC1);
Mat distortion_coefficients;
//导入相机内参和畸变系数矩阵
FileStorage file_storage("out_camera_data.xml", FileStorage::READ);
file_storage["Camera_Matrix"] >> camera_matrix;
file_storage["Distortion_Coefficients"] >> distortion_coefficients;
file_storage.release();
//矫正
undistort(src, distortion, camera_matrix, distortion_coefficients);
imshow("img", src);
imshow("undistort", distortion);
imwrite("undistort.jpg", distortion);
waitKey(0);
return 0;
}
以上是关于全景拼接学习-原理篇 相机标定 内参和外参的主要内容,如果未能解决你的问题,请参考以下文章