ROS1云课→04功能包
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS1云课→04功能包相关的知识,希望对你有一定的参考价值。
先下载课程主页提及的功能包:
wget https://labfile.oss.aliyuncs.com/courses/854/rosdemos_ws.zip
解压缩:
unzip rosdemos_ws.zip
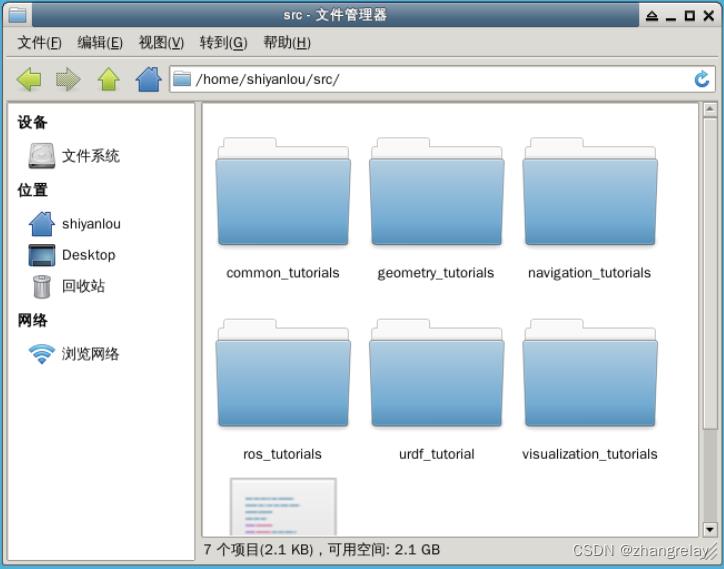
选择,任一个按“ROS1云课→03工作空间”中内容,进行编译,以ros_tutorials为例:
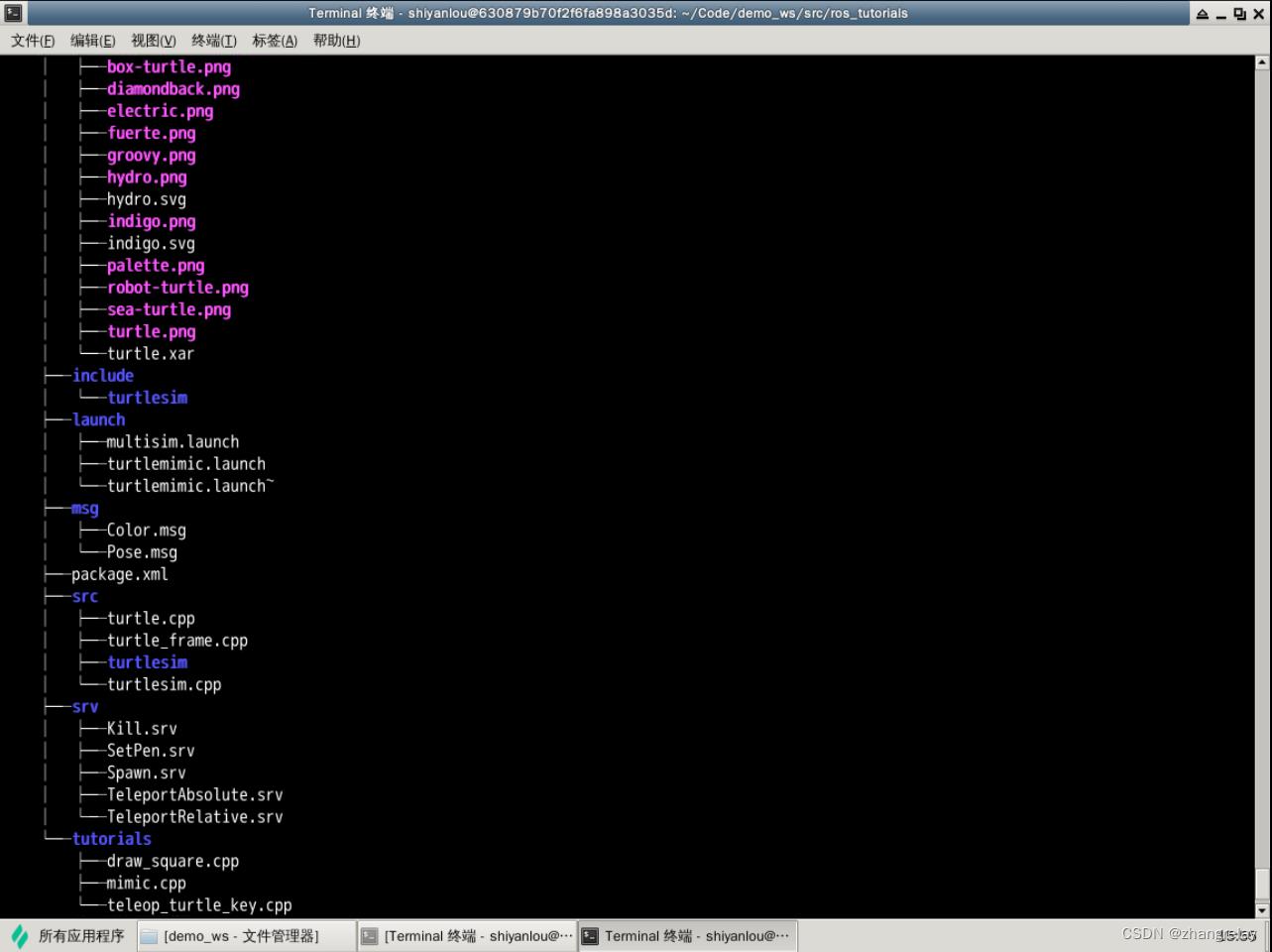
功能包指的是一种特定结构的文件和文件夹组合。这种结构如下所示:
- include/package_name/:此目录包含了需要的库的头文件。
- msg/:如果开发需要非标准的消息,请把文件放在这里。
- scripts/:其中包括Bash、Python或任何其他脚本的可执行脚本文件。
- src/:这是存储程序源文件的地方。你可能会为节点创建一个文件夹或按照希望的方式去组织它。
- srv/:这表示服务(srv)类型。
- CMakeLists.txt:这是CMake的生成文件。
- package.xml:这是功能包清单文件。
为了创建、修改或使用功能包,ROS提供了一些工具:
- rospack 使用此命令来获取信息或在系统中查找工作空间。
- catkin_create_pkg使用此命令创建一个新的功能包。
- catkin_make使用此命令来编译工作空间。
- rosdep使用此命令安装功能包的系统依赖项。
- rqt_dep 此命令用来查看包的依赖关系图。如果你想看包的依赖关系图,你会在rqt发现一个称为包图(package graph)插件。选择一个包并查看依赖关系。
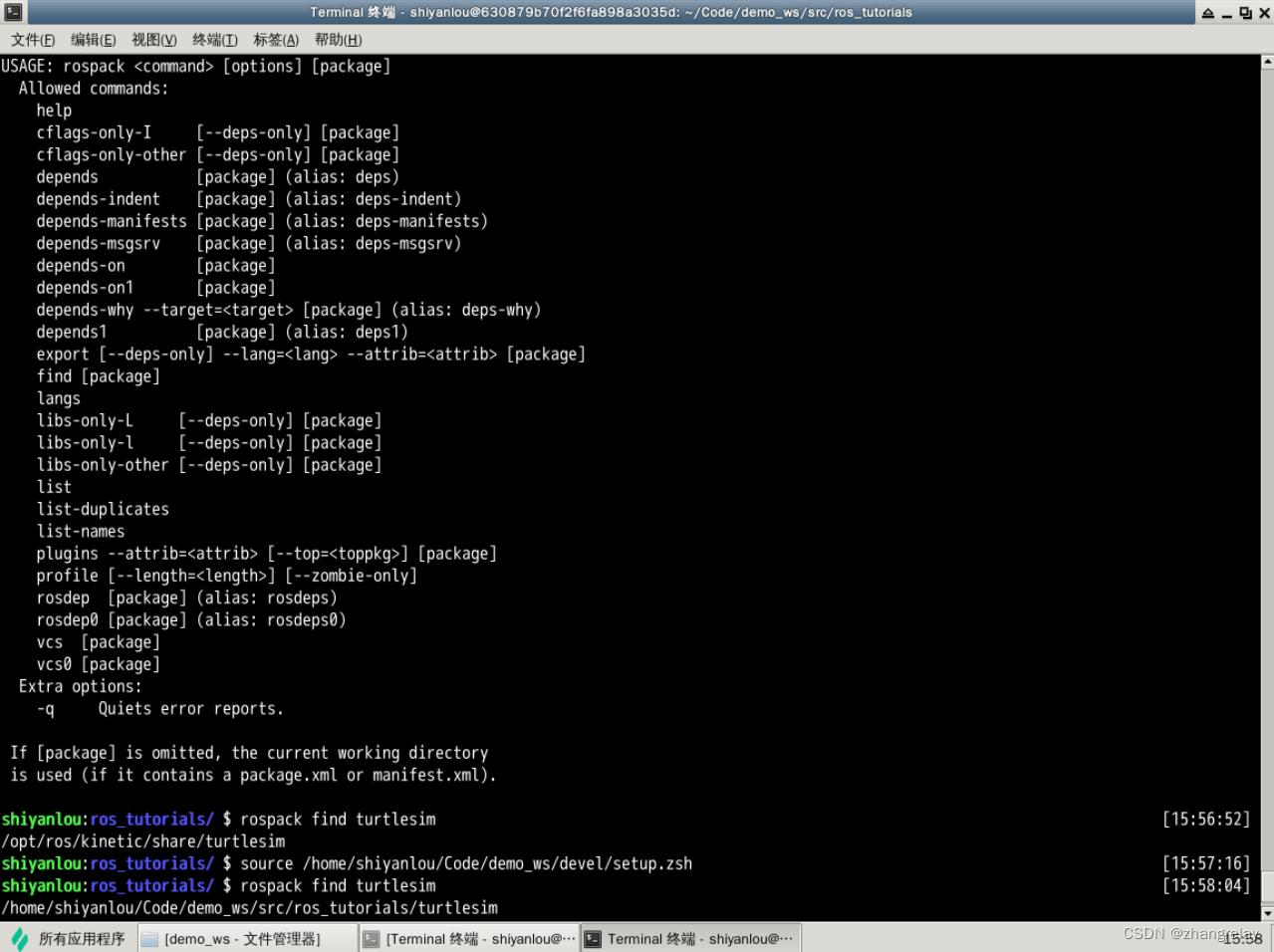
shiyanlou:ros_tutorials/ $ rospack -h [15:59:02]
USAGE: rospack <command> [options] [package]
Allowed commands:
help
cflags-only-I [--deps-only] [package]
cflags-only-other [--deps-only] [package]
depends [package] (alias: deps)
depends-indent [package] (alias: deps-indent)
depends-manifests [package] (alias: deps-manifests)
depends-msgsrv [package] (alias: deps-msgsrv)
depends-on [package]
depends-on1 [package]
depends-why --target=<target> [package] (alias: deps-why)
depends1 [package] (alias: deps1)
export [--deps-only] --lang=<lang> --attrib=<attrib> [package]
find [package]
langs
libs-only-L [--deps-only] [package]
libs-only-l [--deps-only] [package]
libs-only-other [--deps-only] [package]
list
list-duplicates
list-names
plugins --attrib=<attrib> [--top=<toppkg>] [package]
profile [--length=<length>] [--zombie-only]
rosdep [package] (alias: rosdeps)
rosdep0 [package] (alias: rosdeps0)
vcs [package]
vcs0 [package]
Extra options:
-q Quiets error reports.
If [package] is omitted, the current working directory
is used (if it contains a package.xml or manifest.xml).
shiyanlou:ros_tutorials/ $ rqt_dep -h [16:00:53]
usage: main.pyc [-b BINDING] [--clear-config] [--force-discover] [-h]
[--reload-import] [-t] [-v]
Options for GUI instance:
-b BINDING, --qt-binding BINDING
choose Qt bindings to be used [pyqt|pyside]
--clear-config clear the configuration (including all perspectives
and plugin settings)
--force-discover force a rediscover of plugins
-h, --help show this help message and exit
--reload-import reload every imported module
-t, --on-top set window mode to always on top
-v, --verbose output qDebug messages
若要在文件夹和功能包之间移动文件,ROS提供了非常有用的rosbash功能包,其中包含了一些非常类似于Linux命令的命令。例如:
- roscd 此命令用于更改目录,类似于Linux中的cd命令。
- rosed 此命令用来编辑文件。
- roscp 此命令用于从一些功能包复制文件。
- rosd 此命令列出功能包的目录。
- rosls 此命令列出功能包下的文件,类似于Linux中的ls命令。
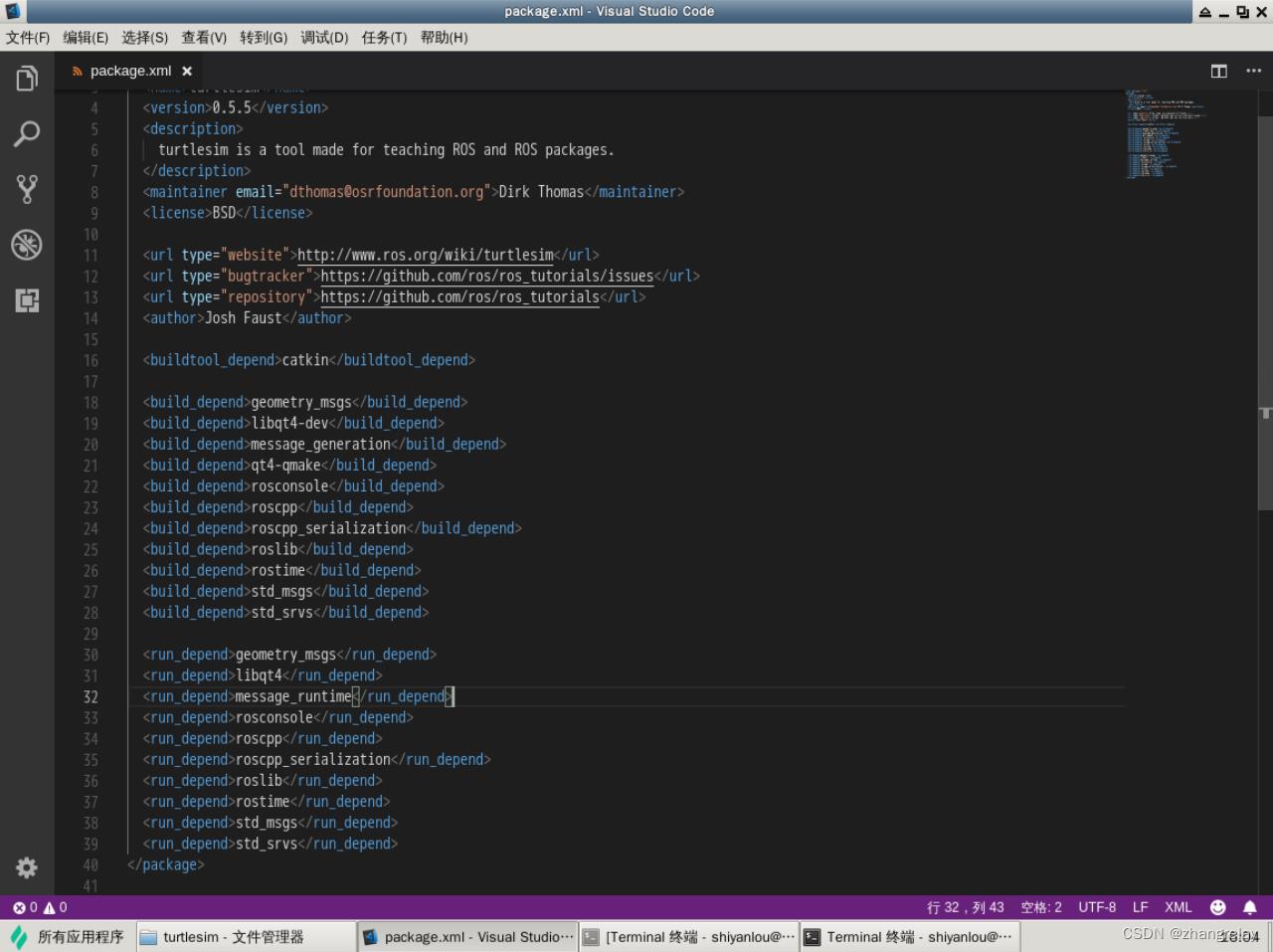
文件package.xml必须在功能包中,用来说明此功能包相关的各类信息。如果你发现在某个文件夹内包含此文件,那么这个文件夹很可能是一个功能包或综合功能包。
打开一个package.xml文件,可以看到包的名称、依赖关系等信息。功能包清单的作用就是为了更容易地安装和分发这些功能包。
在package.xml文件中使用的两个典型标记是<build_depend>和<run_depend>。
<build_depend>标记会显示当前功能包安装之前必须先安装哪些功能包。这是因为新的功能包会使用其他包的一些功能。
<run_depend>标记显示运行功能包代码所需要的包。
补充:

https://docs.ros.org/en/kinetic/api/catkin/html/howto/format2/index.html
https://docs.ros.org/en/kinetic/api/catkin/html/howto/format2/migrating_from_format_1.html
以上是关于ROS1云课→04功能包的主要内容,如果未能解决你的问题,请参考以下文章