ROS1云课→09功能包小定制(CLI命令行接口)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS1云课→09功能包小定制(CLI命令行接口)相关的知识,希望对你有一定的参考价值。
默认的turtlesim:
开始定制化:

首先,将turtlesim源码拷贝到base_tutorials/src目录下:
图标换一下:

然后修改源码turtle_frame.cpp:
QVector<QString> turtles;
turtles.append("rosbot.png");
/*turtles.append("box-turtle.png");
turtles.append("robot-turtle.png");
turtles.append("sea-turtle.png");
turtles.append("diamondback.png");
turtles.append("electric.png");
turtles.append("fuerte.png");
turtles.append("groovy.png");
turtles.append("hydro.svg");
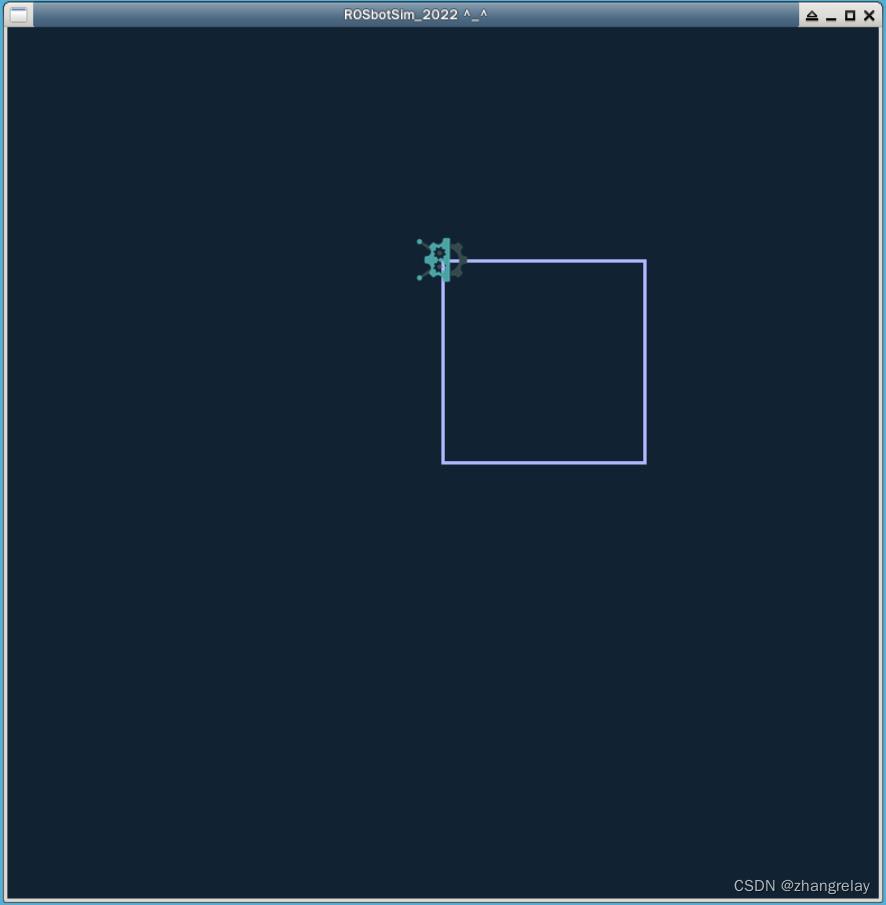
turtles.append("indigo.svg");*/活动背景改色,场地改大一些,ROSbotSim_2022:
#define DEFAULT_BG_R 0x11
#define DEFAULT_BG_G 0x22
#define DEFAULT_BG_B 0x33
namespace turtlesim
TurtleFrame::TurtleFrame(QWidget* parent, Qt::WindowFlags f)
: QFrame(parent, f)
, path_image_(777, 777, QImage::Format_ARGB32)
, path_painter_(&path_image_)
, frame_count_(0)
, id_counter_(0)
setFixedSize(777, 777);
setWindowTitle("ROSbotSim_2022开学大吉"); 
如果去查看节点列表,会看到出现了一个新的节点,叫做/turtlesim。可以通过使用rosnode info nameNode命令查看节点信息。可以看到很多能用于程序调试的信息:
$ rosnode info /turtlesim
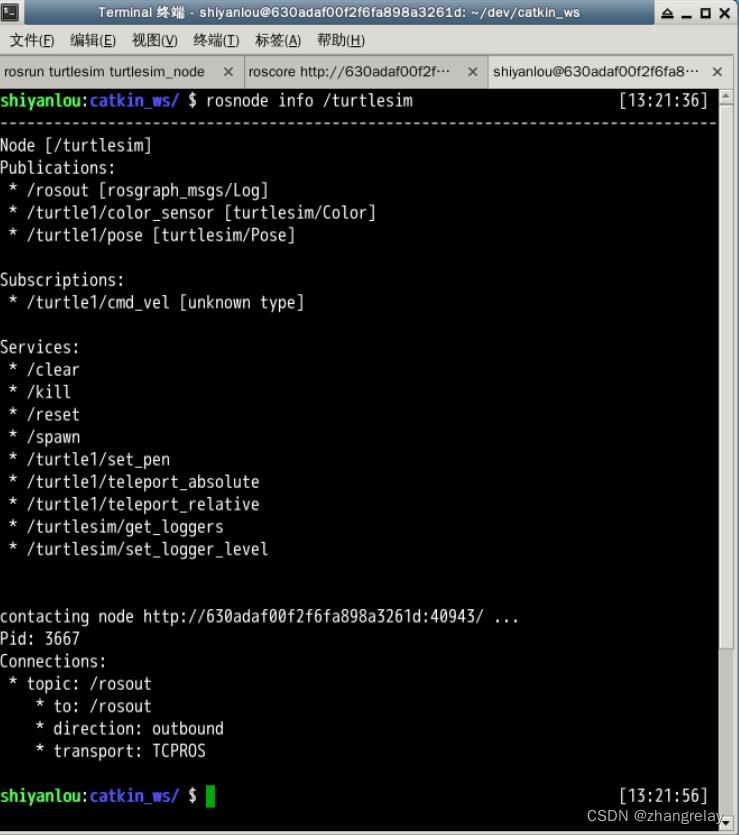
在以上信息中,可以看到Publications(及相应主题)、Subscriptions(及相应主题)、该节点具有的Services(srv)及它们各自唯一的名称。
接下来介绍如何使用主题和服务与该节点进行交互。
通过rostopic使用pub参数,可以发布任何节点都可以订阅的主题。只需要用正确的名称将主题发布出去。将会在以后做这个测试,现在要使用一个节点,并让节点做如下工作:
$ rosrun turtlesim turtle_teleop_key
通过节点订阅的主题,可以使用箭头键移动机器人,如下图所示:


补充:rqt
比如清除:

其他内容依据具体要求进行补充。
介绍了ROS系统的架构及其工作方式的基本信息。学习了一些基本概念、工具及如何同节点、主题和服务进行交互的示例。一开始,所有这些概念可能看起来有些复杂且不太实用,但在后面的课程中,会逐渐理解这样的应用。
最好在继续后续课程的学习之前,对这些概念及示例进行练习,因为在后面的课程里,将假定已经熟悉所有的概念及其用途。
请注意如果想查询某个名词或功能的解释,且无法在课程中找到相关内容或答案,那么可以通过以下链接访问ROS官方资源http://www.ros.org。而且还可以通过访问ROS社区http://answers.ros.org提出自己的问题。
思考,如何实现高精度曲线绘制。
#include <boost/bind.hpp>
#include <ros/ros.h>
#include <turtlesim/Pose.h>
#include <geometry_msgs/Twist.h>
#include <std_srvs/Empty.h>
turtlesim::PoseConstPtr g_pose;
turtlesim::Pose g_goal;
enum State
FORWARD,
STOP_FORWARD,
TURN,
STOP_TURN,
;
State g_state = FORWARD;
State g_last_state = FORWARD;
bool g_first_goal_set = false;
#define PI 3.141592
void poseCallback(const turtlesim::PoseConstPtr& pose)
g_pose = pose;
bool hasReachedGoal()
return fabsf(g_pose->x - g_goal.x) < 0.001 && fabsf(g_pose->y - g_goal.y) < 0.001 && fabsf(g_pose->theta - g_goal.theta) < 0.0001;
bool hasStopped()
return g_pose->angular_velocity < 0.0001 && g_pose->linear_velocity < 0.0001;
void printGoal()
ROS_INFO("New goal [%f %f, %f]", g_goal.x, g_goal.y, g_goal.theta);
void commandTurtle(ros::Publisher twist_pub, float linear, float angular)
geometry_msgs::Twist twist;
twist.linear.x = linear;
twist.angular.z = angular;
twist_pub.publish(twist);
void stopForward(ros::Publisher twist_pub)
if (hasStopped())
ROS_INFO("Reached goal");
g_state = TURN;
g_goal.x = g_pose->x;
g_goal.y = g_pose->y;
g_goal.theta = fmod(g_pose->theta + PI/2.0, 2*PI);
printGoal();
else
commandTurtle(twist_pub, 0, 0);
void stopTurn(ros::Publisher twist_pub)
if (hasStopped())
ROS_INFO("Reached goal");
g_state = FORWARD;
g_goal.x = cos(g_pose->theta) * 4 + g_pose->x;
g_goal.y = sin(g_pose->theta) * 4 + g_pose->y;
g_goal.theta = g_pose->theta;
printGoal();
else
commandTurtle(twist_pub, 0, 0);
void forward(ros::Publisher twist_pub)
if (hasReachedGoal())
g_state = STOP_FORWARD;
commandTurtle(twist_pub, 0, 0);
else
commandTurtle(twist_pub, 1.0*(fabsf(g_pose->x - g_goal.x)+fabsf(g_pose->y - g_goal.y)), 0.0);
void turn(ros::Publisher twist_pub)
if (hasReachedGoal())
g_state = STOP_TURN;
commandTurtle(twist_pub, 0, 0);
else
commandTurtle(twist_pub, 0.0, 0.8*fabsf(g_pose->theta - g_goal.theta));
void timerCallback(const ros::TimerEvent&, ros::Publisher twist_pub)
if (!g_pose)
return;
if (!g_first_goal_set)
g_first_goal_set = true;
g_state = FORWARD;
g_goal.x = cos(g_pose->theta) * 4 + g_pose->x;
g_goal.y = sin(g_pose->theta) * 4 + g_pose->y;
g_goal.theta = g_pose->theta;
printGoal();
if (g_state == FORWARD)
forward(twist_pub);
else if (g_state == STOP_FORWARD)
stopForward(twist_pub);
else if (g_state == TURN)
turn(twist_pub);
else if (g_state == STOP_TURN)
stopTurn(twist_pub);
int main(int argc, char** argv)
ros::init(argc, argv, "draw_square");
ros::NodeHandle nh;
ros::Subscriber pose_sub = nh.subscribe("turtle1/pose", 1, poseCallback);
ros::Publisher twist_pub = nh.advertise<geometry_msgs::Twist>("turtle1/cmd_vel", 1);
ros::ServiceClient reset = nh.serviceClient<std_srvs::Empty>("reset");
ros::Timer timer = nh.createTimer(ros::Duration(0.016), boost::bind(timerCallback, _1, twist_pub));
std_srvs::Empty empty;
reset.call(empty);
ros::spin();
以上是关于ROS1云课→09功能包小定制(CLI命令行接口)的主要内容,如果未能解决你的问题,请参考以下文章