ros使用详解
Posted 超凡脫俗
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ros使用详解相关的知识,希望对你有一定的参考价值。
文章目录
ros概述
软路由是指利用台式机或服务器的供应商配合一定软件而形成的路由解决方案,主要靠对软件的设置,实
现路由器路由器的功能,它的软件与硬件是独立分开的。软路由使用普通计算机,使用通用的操作系统,
如Linux或windows,因此软路由的设置事实上是windows或linux的设置。根据使用的操作系统不同,可
以分为基于windows平台和基于Linux/bsd平台开发的软件路由器。
ros使用winbox登录
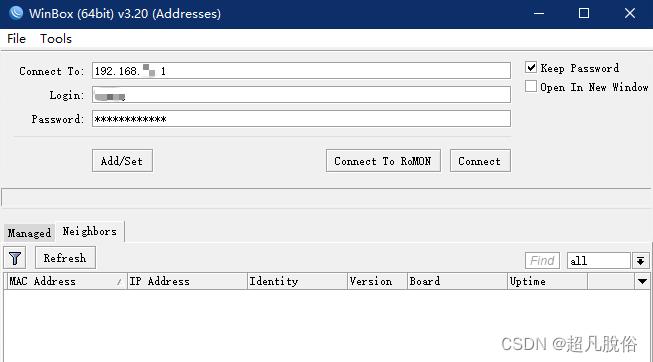
Winbox作为ROS管理工具:
Connect To:IP地址 或MAC地址
Login:管理员账户
Password:管理员密码
Neighbors:查看MAC地址、IP地址等信息
ros关机重启
system shutdown #关机
system reboot #重启
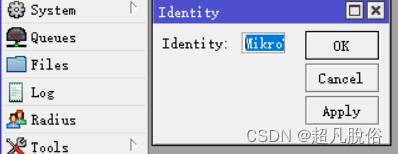
ros修改路由器名
system identity print #查看ros名称
system identity set name=Gateway #修改ros名称
winbox中system的identity修改名称
ros恢复出厂设置
/system> reset-configuration #清除掉路由器的所有配置,包括登陆的账号和密码(恢复为“admin“和空密码)IP 地址和其他配置将会被抹去,在reset 指令执行后路由器将会重启。RouterOS v3.x 后版本,在复位后默认的ether1 接口IP 地址将设置为192.168.88.1/24
/system> reset-configuration
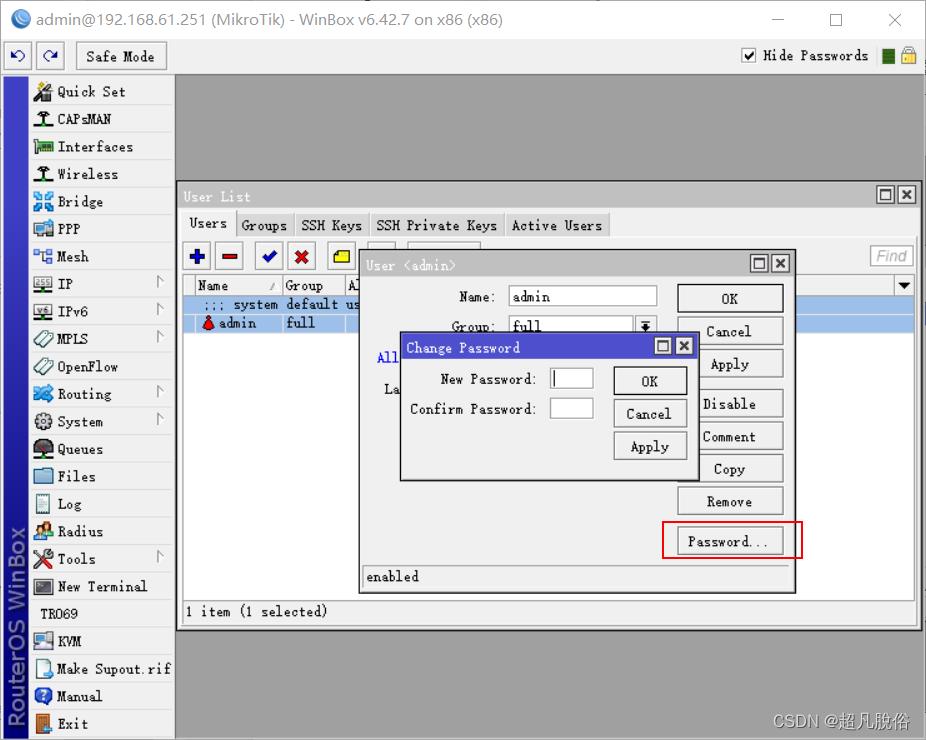
ros修改管理员账号密码及限制登录IP
System下的Users
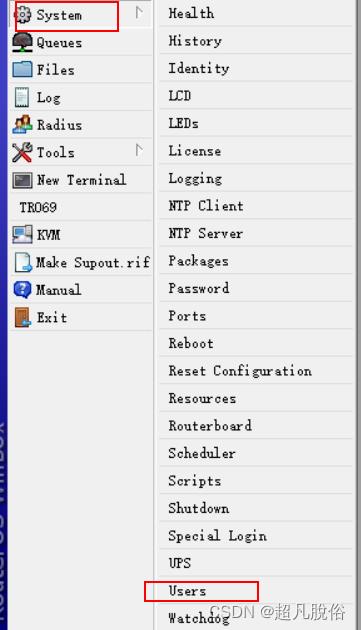
通过+ 添加新用户,或点击编辑已存在用户,点击【password】修改用户登录密码
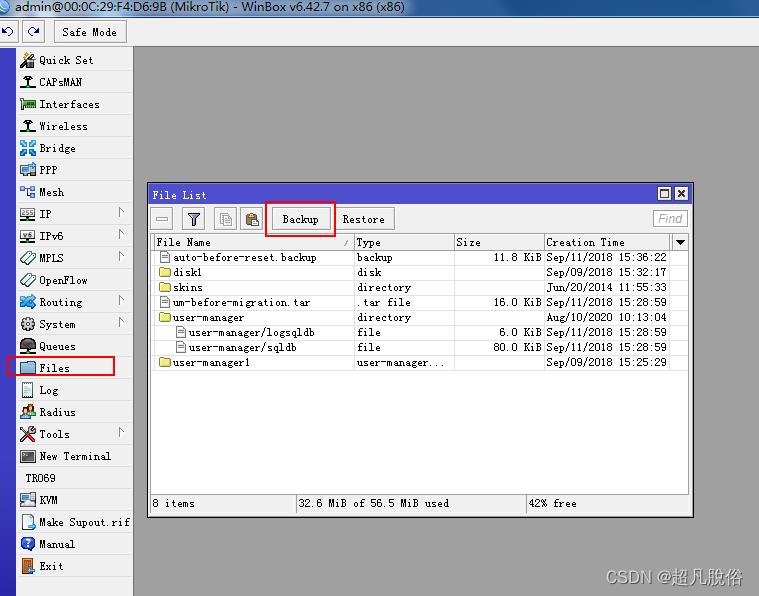
ros备份还原
winbox下配置直接在菜单files菜单下,通过backup进行备份,restore操作还原。
ros使用pppor拨号
Interface->使用“+”->PPPoe Client
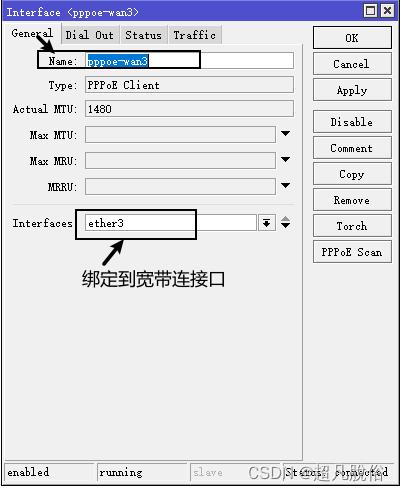
输入宽带账号密码,底下默认或本图配置一致即可

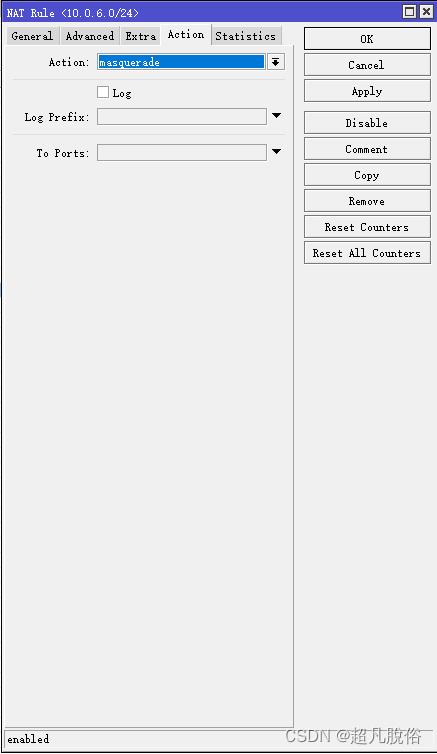
配置完成,但是还不能上网,需要伪装
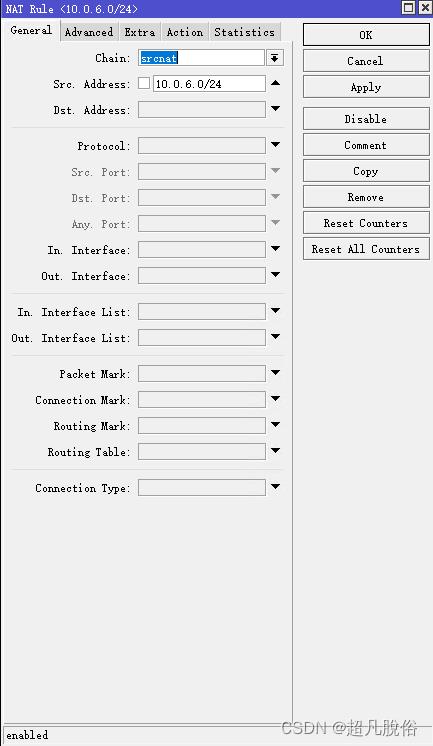
ros的nat,也叫伪装
使用“+”,新增一条NAT规则,src address设置为你的网段,如果存在多网段,增加对应网段的多条NAT规则。
当然也可以设置单个IP:如192.168.1.2,那么就只有192.168.1.2能上网。
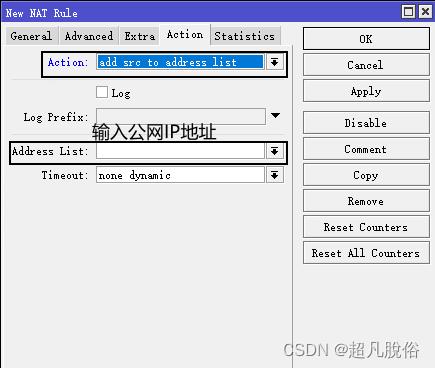
高效率伪装
设置从某个出口进行伪装,是一种效率更高的伪装(适用公网IP)
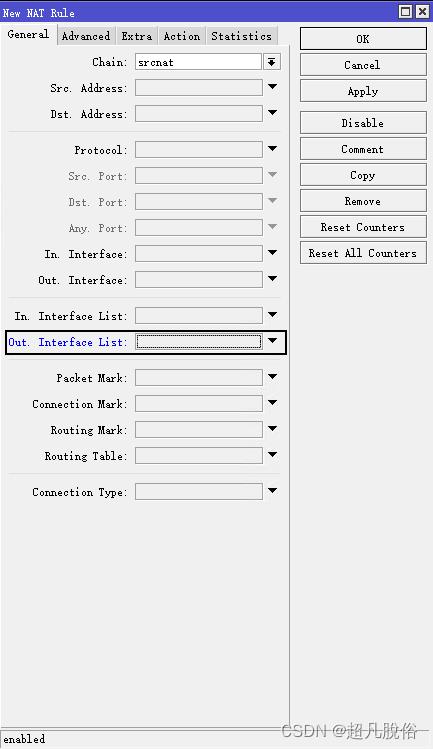
源地址伪装,设置出口的IP地址
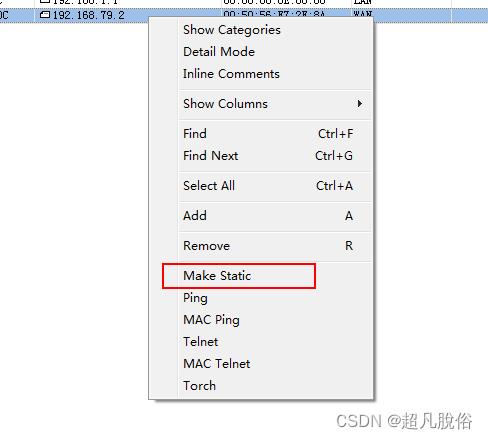
ros静态ARP绑定
在没有三层交换机场景中,ROS为路由网关,在arp列表中,IP前面显示D标识为动态,未做IP+MAC绑定

使用 Make Static 实现IP+MAC绑定,
Remove删除解除绑定,
快捷操作,全选ARP make static
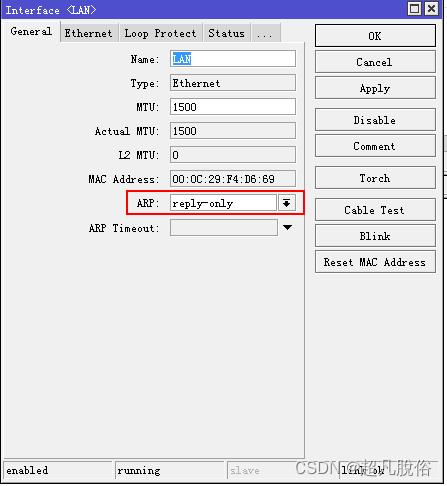
还可以设置路由器只对静态ARP作回应
设置LAN仅回应静态ARP的请求(reply-only)
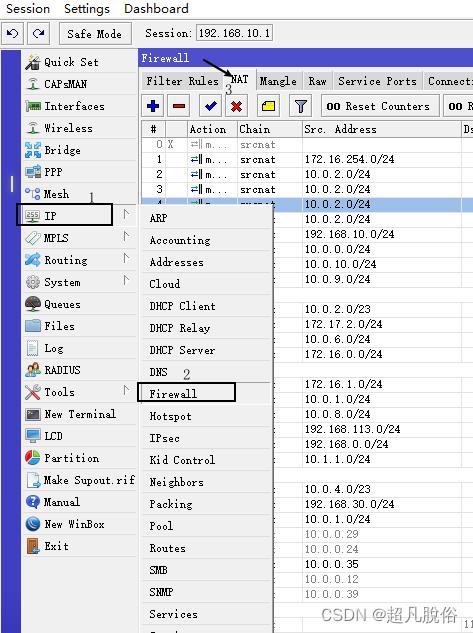
ros端口映射
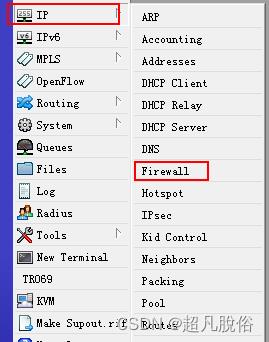
打开winbox客户端登陆之后,找到“ip”–”firewall”防火墙设置,如下图
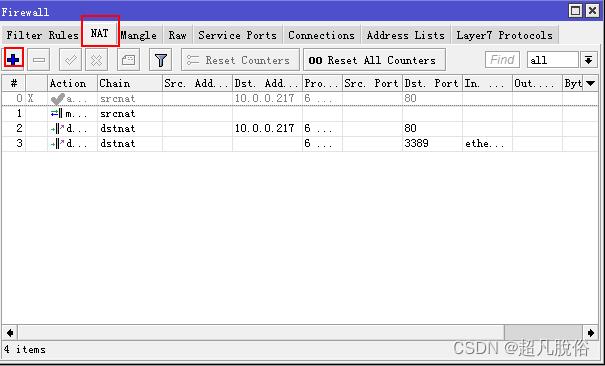
找到防火墙规则,nat里面点击“+”添加规则如下图
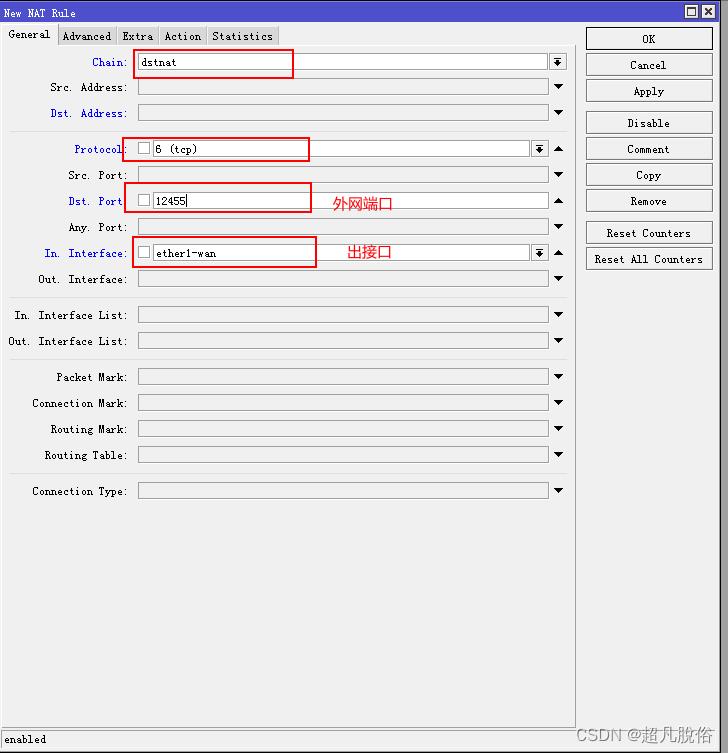
设置端口映射
在一般“general”菜单中,如下图设置。 Chain选择 dstnat ,协议protocl默认即可。 DST port是目标端口就是需要映射的端口外网端口访问的,接着是入口选择上网的公网接口
然后在执行动作action选项设置,选择dst-nat
选好之后,出现的地址to address里面也就是需要映射的服务器的IP地址,
然后是端口号(一般来说都是内网11对应,如果不一致注意这里是内网的端口)
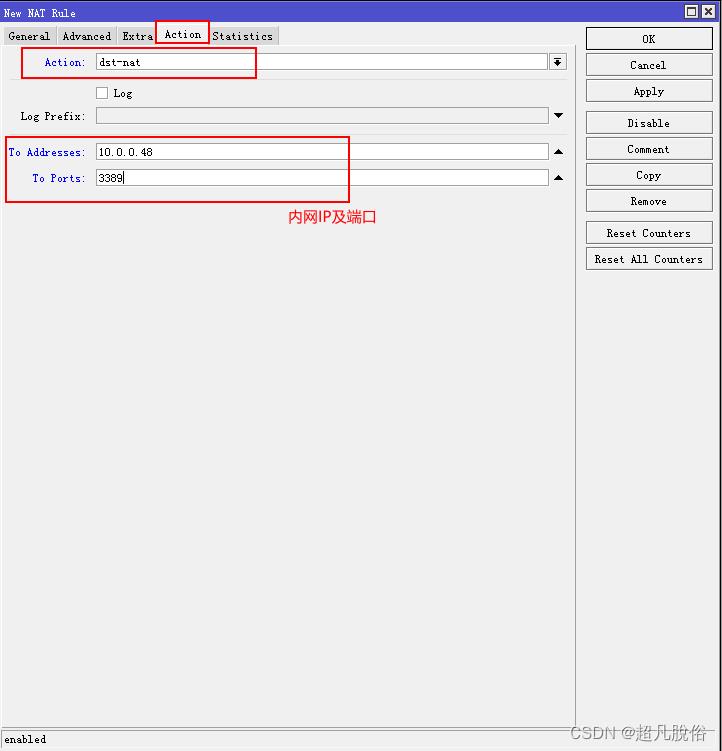
设置好之后,点击应用apply,然后在nat里面就能看到刚刚设置的项目了。
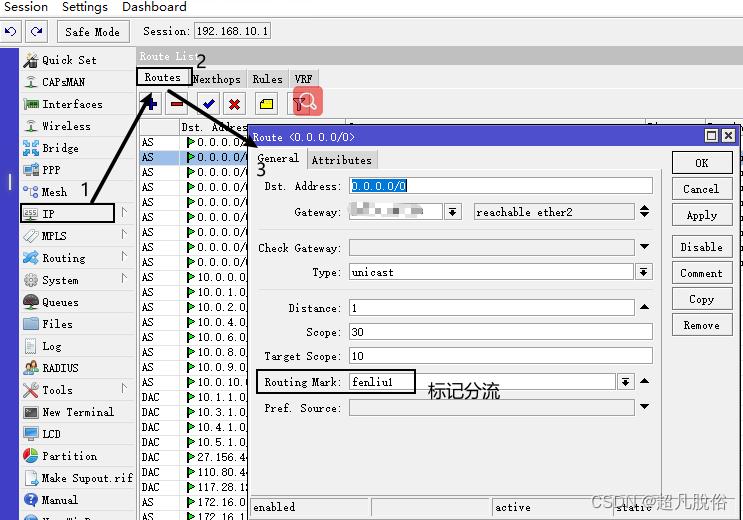
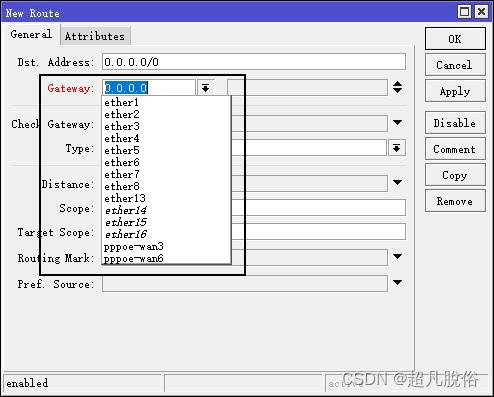
ros配置静态路由
winbox中ip中的routes添加静态路由,目标地址为0.0.0.0/0,Gateway代表出接口、pppoe选择拨号选项,fenliu标识一个分流的标记,用于后续做策略路由,将内网流量指定向某个接口出去。
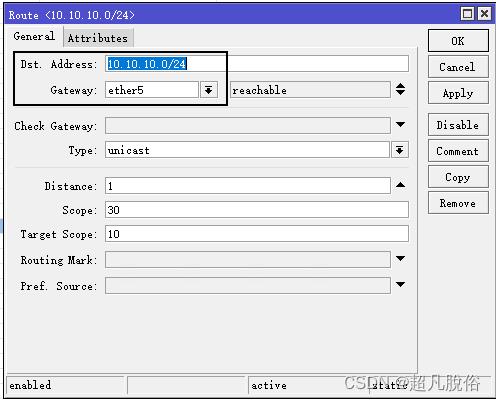
去内网的回程路由,一般只需要指定目标网段及内网接口即可
以上是关于ros使用详解的主要内容,如果未能解决你的问题,请参考以下文章