第十八届全国大学生智能汽车竞赛-竞速比赛完全模型组规则
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十八届全国大学生智能汽车竞赛-竞速比赛完全模型组规则相关的知识,希望对你有一定的参考价值。
01 完全模型组
一、比赛构成
百度完全模型竞速赛分为线上资格赛、线下分区赛和全国总决赛三个阶段,组委会将综合考虑线上资格赛和线下分区赛成绩来进行全国总决赛名额的选拔,其中线上成绩占10%,线下成绩占90%。组委会将从报名参加线上资格赛的学校中,随机向不少于100个学校提供百度EdgeBoard计算卡(FZ3B赛事定制版)免费借用资格。
二、车模
车模采用 I 型车模。要求自行设计制作车模外壳。车模制作完之后,对于车模尺寸没有限制。
三、微控制器与传感器
- 车模运动控制单片机使用灵动微电子(
MindMotion)单片机。 - 视觉模型部署在百度的
Edgeboard。其他传感器没有限制。
四、线上资格赛
线上资格赛任务说明、提交入口和评测榜单后续将在AI Studio公布。
五、赛道与线下比赛任务
比赛赛道是在室内循环赛道的基础上,赛道上没有电磁引导线。在赛道旁边增加了若干元素。比赛任务和详细规则将会通过《第十八届全国大学生智能车竞赛完全模型组比赛细则》进行说明。
02 比赛规则
一、比赛场地
1、比赛环境
2、比赛场地
(1)比赛赛道
完全模型组比赛赛道以室内循环赛道为基础,赛道材质,赛道规格均保持一致。在导引方式上完全保留室内循环赛道的导引方式,并在此基础上添加完全模型组任务导引标志和锥桶,引导车模完成完全模型组赛道任务。
(2)赛道标志
为了引导比赛任务的完成,在比赛赛道的任务元素和特殊元素区域的前方路旁的指定区域放有三维模型实体标志。以车辆行驶的方向看去,实体标志的角度与正面图中角度相当,摆放偏差不超过±45度。
实体标志的样式和含义如下表所示:
Ⅱ.车辆维护标志
- 功能描述:表示前方车辆维护站,需要在指定范围内停车片刻。
- 模型尺寸:154.5×92×109mm
- 颜色:大红色红、黑色
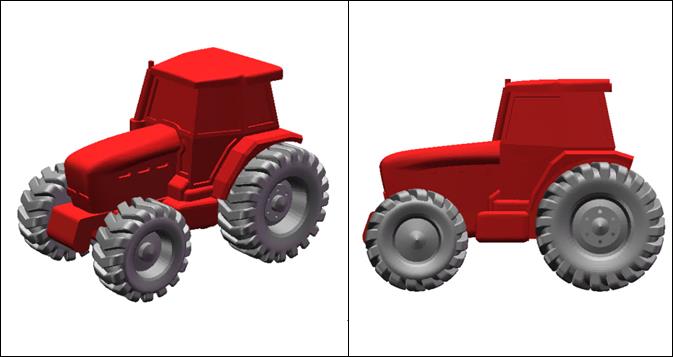
▲ 图2.1.1 车辆维护标志
Ⅲ.农田标志
- 功能描述:表示前方农田,非常规道路,需要依据锥桶围出的场地行驶
- 模型尺寸:120×120×170mm
- 颜色:中黄色、葱绿色

▲ 图2.1.2 农田标志
Ⅳ.减速标志
- 功能描述:表示前方动物出没,减速慢行
- 模型尺寸:144×55×72mm
- 颜色:桃红色

▲ 图2.1.3 减速标志
Ⅴ.坡道标志
- 功能描述:表示道路前方有坡道
- 模型尺寸:138.5×44×69mm
- 颜色:大红色

▲ 图2.1.4 坡道标志
Ⅵ.粮仓标志
- 功能描述:表示前方为粮仓,车辆需要驶入粮仓并按照指定的出口驶出,模拟定点卸货
- 模型尺寸:109×109×80mm
- 颜色:中黄色
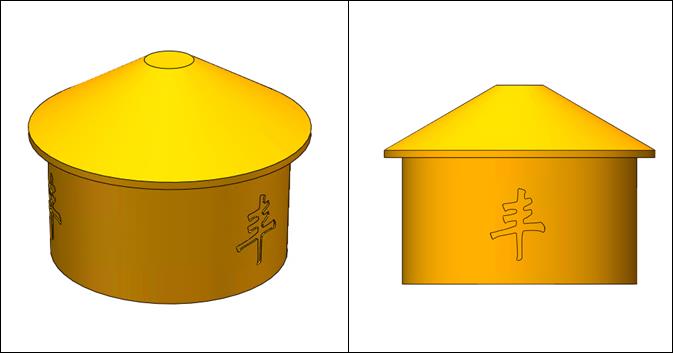
▲ 图2.1.5 粮仓标志
组委会提供标准的3D打印STL文件,参赛队可以自行打印并使用颜料或喷漆上色。标注颜色以“三和”牌自喷漆颜色为准。
(3) 任务锥桶
比赛在基础赛道外设置有脱离基础赛道的任务区域,这些任务区域由可以移动的锥桶在基础赛道的边缘临时搭建而成。

▲ 图2.1.6 锥桶
锥桶由塑料材质制作而成,外表面为黄色纯色,无任何标志。锥桶的底部直径75mm,高度75mm。在赛道搭建完成锥桶与地面不固定,为可移动状态。
二、比赛任务
二、比赛任务
本届完全模型组场地为智慧农业场景,模拟智能车辆在收货季节的运行和作业,车辆不但需要自主驶过常规道路,还要驶入特殊区域,如车辆维护区、农田区、动物出没区、坡道、粮仓区。农业场景下智能车辆会出现穿过农田区、驶过动物出没区、经过上下坡道等动作。农用车辆处于长时间高负荷工作状态,需要频繁的进行维护和保养,通过车辆维护区时要求车辆停入指定区域,并有片刻的停车动作,完成车辆维护过程。满载丰收粮食的智能车辆需驶入粮仓,根据入口处的指示,到达粮仓内部,并从指定的出口驶出。
选手制作的车模完成从车库出发沿着赛道运行两周。车模需要分别通过道路设置的各种元素,识别道路旁的标志完成特殊路段通行。
比赛时间从车模驶出车库到重新回到车库为止。如果车模没有能够停止在车库内停车区内,比赛时间加罚5秒钟。对于未完成的任务会通过相应的加罚时间叠加在比赛时间上。
以下特殊路段通过失败时发车手可手动援救,重新将车辆置于特殊路段之后启动,该路段视为通过失败,按规定罚时,且计时不停止;通过各区域时明显碰撞锥桶视为破坏农田,每次罚时5秒。
1、车辆维护区
车辆完成维护过程,如图所示,车辆维护区具有车辆维护标志的一侧设置有锥桶摆放成的停车区域,车辆识别识别路旁的实体标志,完全驶入锥桶区域且停车片刻后启动。不停车罚时15秒,未完全停在区域内罚时10秒。
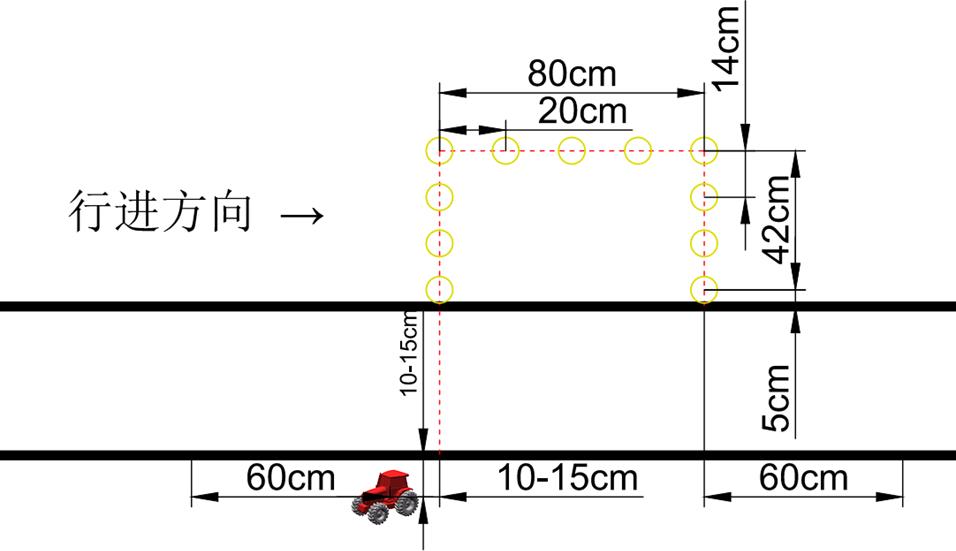
▲ 图2.2.1 车辆维护区
图中每个黄色圆圈代表1个小锥桶,实际摆设中存在锥桶中心不在同一直线以及间距也不完全相等,误差在锥桶半径范围内。
2、农田区
车辆通过农田非铺装道路,如图所示,农田赛道上缺失一段常规道路,锥桶外侧为农田,不可驶入。车辆识别农田实体标志,驶入农田区,依据锥桶的指示驶出农田区,重新回到常规道路上行驶。农田区布置在直路上或者小于90度弯角道路,锥桶围成的道路宽度45cm±10cm。

▲ 图2.2.2 农田区
图中每个黄色圆圈代表1个小锥桶,实际摆设中存在锥桶中心不在同一直线以及间距也不完全相等。
3、动物出没区
车辆通过动物出没路段,区域内设置减速带,需要减速慢行,需要减速慢行以减小颠簸对于车身姿态和传感器的影响。如图所示,车辆识别减速带前路旁的动物出没实体标志,自主判断形势策略。

▲ 图2.2.3 动物出没路段

▲ 图2.2.4 动物出没路段侧视图
4、坡道
场地中设置有坡道,需要谨慎行驶,如图所示,坡道前路旁摆放实体坡道标志,车辆识别标志便于提前预知坡道,从而自主判断形势策略。

▲ 图2.2.5 坡道
5、粮仓区
赛道中设置有粮仓区域,粮仓区域由黄色的锥桶围成,分为1个入口和2个出口。2个出口距入口更近的为1号出口,远的为2号出口。粮仓区入口处前路旁的实体粮仓标志数量代表出口号,1个粮仓标志则从1号出口驶出,2个粮仓标志则从2号出口驶出即可。在车模出发后,由现场裁判员随机确定粮仓标志的数量,车模运行两圈,两圈的数量不相同,第一圈当车模离开粮仓区之后,再由裁判员将调整粮仓标志数量。粮仓区元素仅在全国赛上使用。
如果车模未行驶入粮仓区直接通过每次罚15秒,从错误出口驶出罚时5秒。
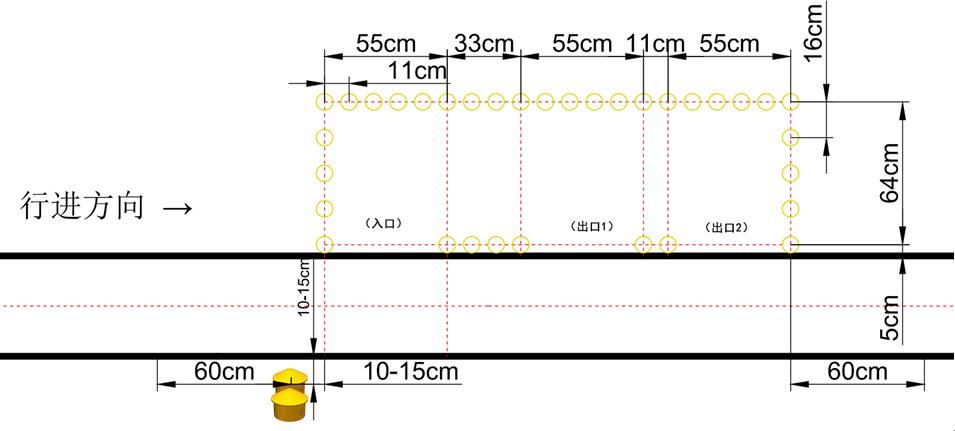
▲ 图2.2.6 粮仓区域
图中每个黄色圆圈代表1个小锥桶,实际摆设中存在锥桶中心不在同一直线以及间距也不完全相等,误差在锥桶半径范围内。
6、车模技术要求
7、车模平台
车模可以使用竞赛指定的I型车模。
车模必须带有车壳,保证车壳的完整美观。车壳必须完整的包裹车辆的本身,车身的底板外边缘,4 个轮子和越过车壳的传感器及其支撑件外,车辆的正视图,侧视图和俯视图看不到车辆的内部细节。为了方便调试和电池的安装,可以将车壳整体或部分做成活动的部件,但是在运行过程中必须保持车壳为闭合的整体。车壳的限制使用光敏树脂、PLA、ABS、尼龙,等塑料材质制作而成。
车模其他详细修改要求说明参看已经公布的《第十八届全国大学生智能车竞赛竞速比赛规则》 附录2:车模修改要求。
车模作品完成之后,车模的尺寸没有限制。
8、微控制器
车模的赛道元素检测识别需要只能使用百度EdgeBoard计算卡(FZ3B赛事定制版)且只允许使用1块。车模运动控制单片机使用灵动微电子(MindMotion)单片机设计车模的运动控制电路板。
参赛学生必须使用百度开源深度学习平台PaddlePaddle进行模型的设计、训练和预测,不得使用其他相关平台、框架及任何飞桨中未包含的学习方法参赛,考虑到学生自身设备可能有限,百度将提供统一线上算力平台AI Studio(https://aistudio.baidu.com/)便于大家训练模型。
9、传感器
车模作品中只允许最多使用2个摄像头对赛道进行识别,并且摄像头必须直连到EdgeBoard计算卡
(可通过HUB拓展USB接口直连数量)上用于赛道及其元素的检测。
车模作品中允许使用其他非摄像头类传感器进行环境的辅助检测,车辆姿态和运动控制的反馈,但不得用于赛道元素(直道,弯道,坡道等)和赛道标志的识别。选用的传感器或者其它电子部件中不得包括独立的微处理器,超声波传感器除外。
10、软件开发工具
可以使用C/C++语言,Python语言等完成车模中软件的开发。
关于车模其它要求请参见《第十八届全国大学智能汽车竞赛竞速比赛规则》中统一要求。
三、技术交流
技术交流群:
QQ:370923641
▲ 图2.3.1 技术交流群
● 相关图表链接:
- 图2.1.1 车辆维护标志
- 图2.1.2 农田标志
- 图2.1.3 减速标志
- 图2.1.4 坡道标志
- 图2.1.5 粮仓标志
- 图2.1.6 锥桶
- 图2.2.1 车辆维护区
- 图2.2.2 农田区
- 图2.2.3 动物出没路段
- 图2.2.4 动物出没路段侧视图
- 图2.2.5 坡道
- 图2.2.6 粮仓区域
- 图2.3.1 技术交流群
以上是关于第十八届全国大学生智能汽车竞赛-竞速比赛完全模型组规则的主要内容,如果未能解决你的问题,请参考以下文章