智能车竞赛:智能视觉组内容初步商定
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了智能车竞赛:智能视觉组内容初步商定相关的知识,希望对你有一定的参考价值。
第十八届智能视觉组比赛内容初步设计
01 智能视觉组
一、背景介绍
今天下午,全国大学生智能车竞赛组委会秘书处,与NXP公司技术人员对智能视觉赛题组进行了讨论。 首先总结了第17届比赛中的经验和特点,本着循序渐进的原则对第十八届智能车竞赛中, 智能视觉组的赛题内容进行了讨论。 使得这个组别能够基于参赛队伍更多的发挥的空间。
二、初步设计结果
经过一个多小时网络会议, 对于智能视觉组比赛内容达成了以下初步修改意见。 整体上,比赛内容还是以目标识别检测、 目标搬运为主要竞赛要点。 增加人机交互、 允许引入多机协同内容, 改变目标图片集合等。

1、目标检测
关于目标检测, 变化是从识别到检测的转变。 在过去的比赛中, 目标的形状和位置是预先给定的。 比赛核心为目标识别。 在新的以比赛中,目标位置改成未知, 需要智能车完成目标位置检测。 在比赛场地内, 目标存在随机摆放情况。 大约三分之一到三分之二的目标位置, 预先不通过A4纸进行给定。

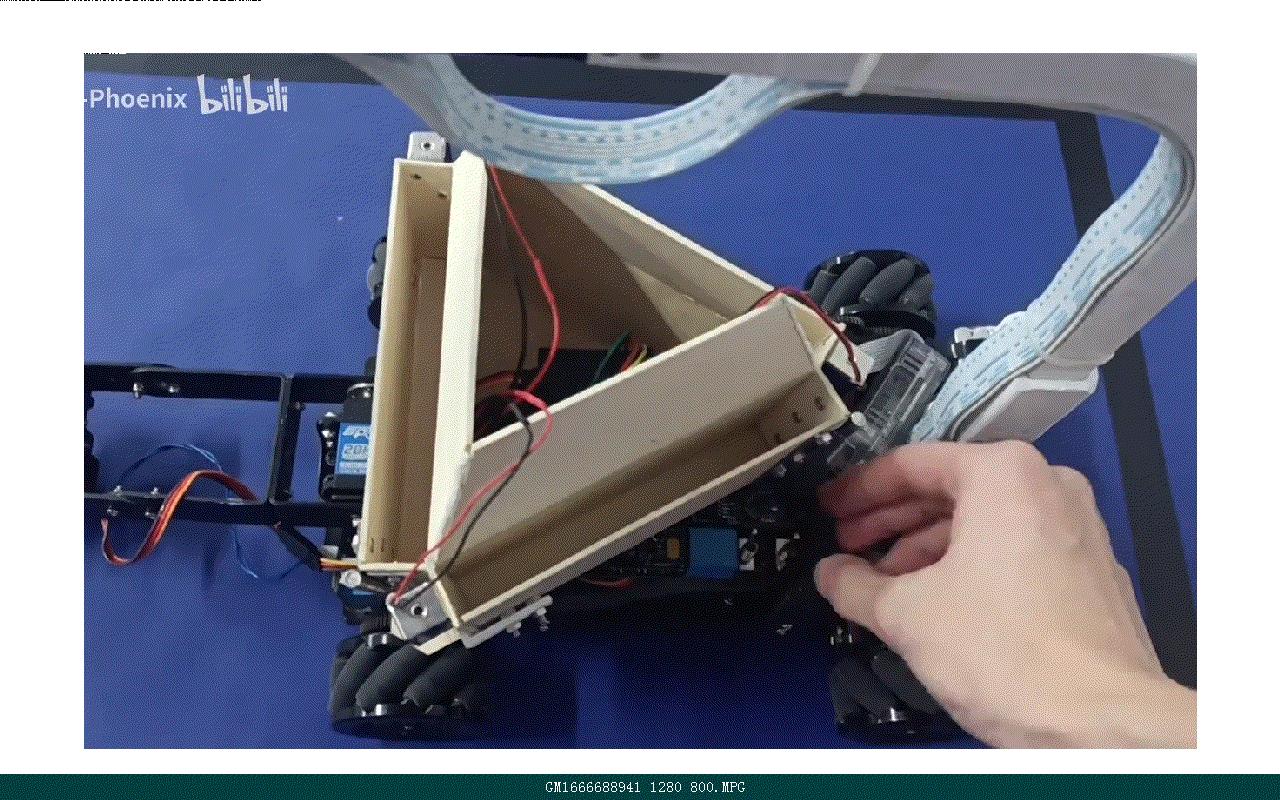
2、目标搬运
下面关于目标搬运, 主要的改动是投放区域。 17届中只要求将目标搬运到赛场边缘, 在18届中, 场地边缘部署四个仓库区, 目标搬运到仓库内, 会有额外分值减免, 从而鼓励车模运动轨迹优化。 对于仓库外观定义, 将会在正式颁布规则中给出。
3、语言控制
关于语音交互和多车协同是可选项。 语音交互允许参赛队员 在场外通过蓝牙语音传递 控制车模运行和执行动作。 要求是不允许使用 成品的语音模块, 必须使用恩智浦单片机 自行完成语音检测识别。

4、多车协同
多车协同也是可选项, 既允许制作多个车模协同作业。 但多个车模不是一模一样的车模。 而是可以协同搬运的车模,就像联合收割机和搬运机那样。 在目标识别搬运过程中, 识别与搬运是主车的任务, 另外可以允许使用多个辅助车模, 完成将目标板搬运到储存仓库内。 多车协同搬运和人机交互, 是可选的内容, 以提高比赛效率。

※ 总 结 ※
本文介绍了第十八届全国大学生智能车竞赛智能视觉组的比赛内容, 在过去的一届比赛内容基础上, 允许增加语音交互和多车协同, 这为参赛队伍留下了更多的比赛创意空间。

以上是关于智能车竞赛:智能视觉组内容初步商定的主要内容,如果未能解决你的问题,请参考以下文章
智能车竞赛技术报告 | 智能车视觉 - 首都师范大学 - 首师智能视觉