永磁同步电机模型之坐标变换
Posted 海洋想想
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了永磁同步电机模型之坐标变换相关的知识,希望对你有一定的参考价值。
文章目录
前言
本文主要介绍永磁电机模型的坐标变化极其推导过程。本文主要参考资料:
- 哈肯.工业运动控制——电机选择、驱动器和控制器应用.机械工业出版社
- 永磁同步电机常见形式状态方程推导 传送门
- 陈伯时.自动控制系统——电力拖动控制.中央广播电视大学出版社
- 付兴贺,陈 锐.电机中ABC 到dq0 坐标变换的梳理与辨析
旋转磁场
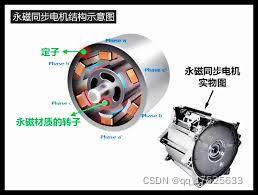
在直流电机中,通过电刷与换向器切换转子的电流方向,让电机转子旋转起来。而在无刷电机或者永磁同步电机中,没有电刷或换向器,而转子通常为永磁体。这个时候需要在定子中通入正弦电流,从而形成旋转磁场,让永磁体在旋转磁场的推动下旋转起来。下面,重点介绍旋转磁场如何形成。
下图为永磁同步电机的结构示意图:
可以将定子模型简化为下图:
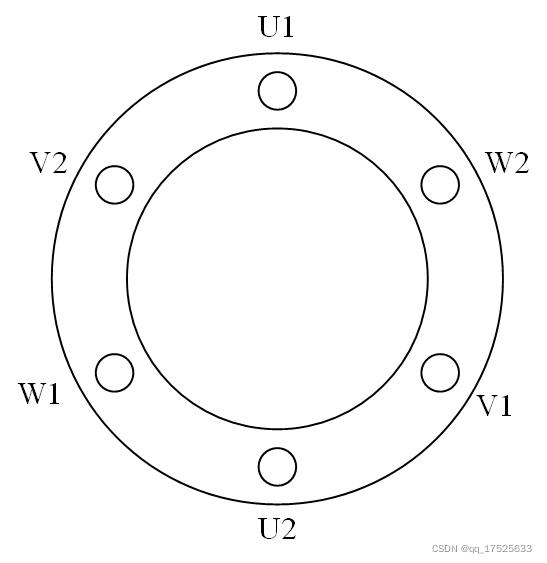
其中U1和U2,V1和V2,W1和W2形成三组空间位置相差120度的绕组。相同组的绕组内通入的电流相同,形成相同方向的磁场。
其抽象图如下图所示:
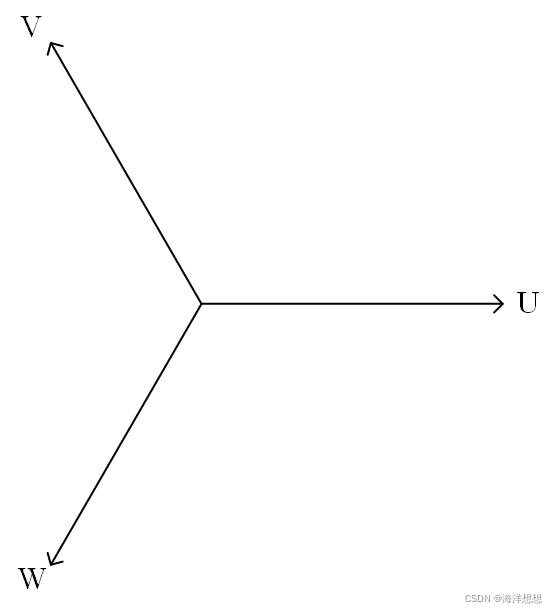
则分别在U,V,W通入三相交流电
i U = I s i n ( θ ) i V = I s i n ( θ + 2 π 3 ) i W = I s i n ( θ − 2 π 3 ) \\left\\ \\beginaligned & i_\\mathrmU=I\\mathrmsin(\\theta) \\\\ & i_\\mathrmV=I\\mathrmsin(\\theta + \\frac2\\pi3)\\\\ & i_\\mathrmW=I\\mathrmsin(\\theta - \\frac2\\pi3) \\endaligned \\right. ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧iU=Isin(θ)iV=Isin(θ+32π)iW=Isin(θ−32π)
如下图所示:
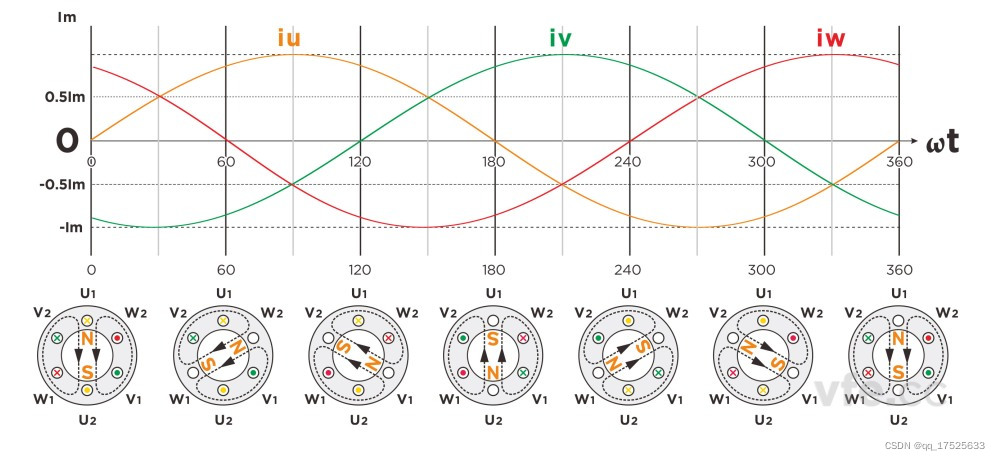
在每60度选取一点,可以发现,磁场确实随着电流变化而旋转。上图形象的展示了这一点。另外,也可以提供数学证明。
因为定子绕组是通过导线缠绕而成,可以将其视作电感, 根据公式:
λ
=
L
i
\\lambda=Li
λ=Li
其中, λ \\lambda λ表示磁链, L L L为定子绕组电感, i i i为三项电流。
则可以知道,磁链与电流成正比,所以,可以将三相交流电产生的磁通用下式表示:
λ U = L I s i n ( θ ) λ V = L I s i n ( θ + 2 π 3 ) λ W = L I s i n ( θ − 2 π 3 ) \\left\\ \\beginaligned & \\lambda_\\mathrmU=LI\\mathrmsin(\\theta) \\\\ & \\lambda_\\mathrmV=LI\\mathrmsin(\\theta + \\frac2\\pi3)\\\\ & \\lambda_\\mathrmW=LI\\mathrmsin(\\theta - \\frac2\\pi3) \\endaligned \\right. ⎩⎪⎪⎪⎪⎨⎪⎪⎪⎪⎧λU=LIsin(θ)λV=LIsin(θ+32π)λW=LIsin(θ−32π)
为了方便分析,可以建立下图(
α
−
β
\\alpha-\\beta
α−β坐标系)。因为
L
I
LI
LI为常数,可以设为
F
m
a
x
F_\\mathrmmax
Fmax 。
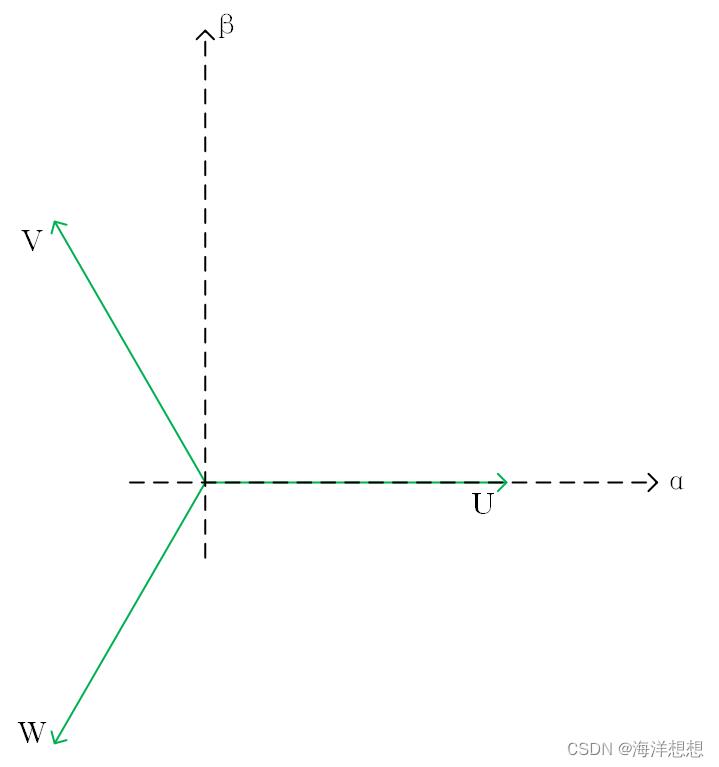
则可以得到三相叠加在
α
\\alpha
α轴的分量为:
λ
α
=
λ
U
c
o
s
0
+
λ
V
c
o
s
(
2
3
π
)
+
λ
W
c
o
s
(
−
2
3
π
)
=
F
m
a
x
s
i
n
θ
+
F
m
a
x
s
i
n
(
θ
+
2
3
π
)
c
o
s
(
2
3
π
)
+
F
m
a
x
s
i
n
(
θ
−
2
3
π
)
c
o
s
(
−
2
3
π
)
=
F
m
a
x
s
i
n
θ
+
c
o
s
(
2
3
π
)
[
s
i
n
(
θ
+
2
3
π
)
+
s
i
n
(
θ
−
2
3
π
)
]
\\beginaligned \\lambda_\\alpha=& \\lambda_\\mathrmU\\mathrmcos0+ \\lambda_\\mathrmV\\mathrmcos \\left( \\frac23\\pi\\right)+\\lambda_\\mathrmW\\mathrmcos \\left (-\\frac23\\pi \\right )\\\\ =&F_\\mathrmmax\\mathrmsin\\theta+ F_\\mathrmmax\\mathrmsin\\left( \\theta +\\frac23\\pi \\right)\\mathrmcos \\left( \\frac23\\pi\\right)+ F_\\mathrmmax\\mathrmsin\\left( \\theta -\\frac23\\pi \\right)\\mathrmcos \\left( -\\frac23\\pi\\right)\\\\ =&F_\\mathrmmax\\left\\ \\mathrmsin\\theta+\\mathrmcos \\left( \\frac23\\pi\\right)\\left[ \\mathrmsin\\left( \\theta +\\frac23\\pi \\right)+ \\mathrmsin\\left( \\theta -\\frac23\\pi \\right)\\right ] \\right\\\\\\ \\endaligned
λα===λUcos0+λVcos(32π)+λWcos(−32π)Fmaxsinθ+Fmaxsin(θ+32π)cos(32π)+Fmaxsin(θ−32π)cos(−32π)Fmaxsinθ+cos(32π)[sin(θ+32π)+sin(θ−32π)]
在
β
\\beta
β轴的分量为: 以上是关于永磁同步电机模型之坐标变换的主要内容,如果未能解决你的问题,请参考以下文章
λ
β
=
λ
U
s
i
n
0
+